
一种玻璃杯清洗机器人.pdf

努力****冰心

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种玻璃杯清洗机器人.pdf
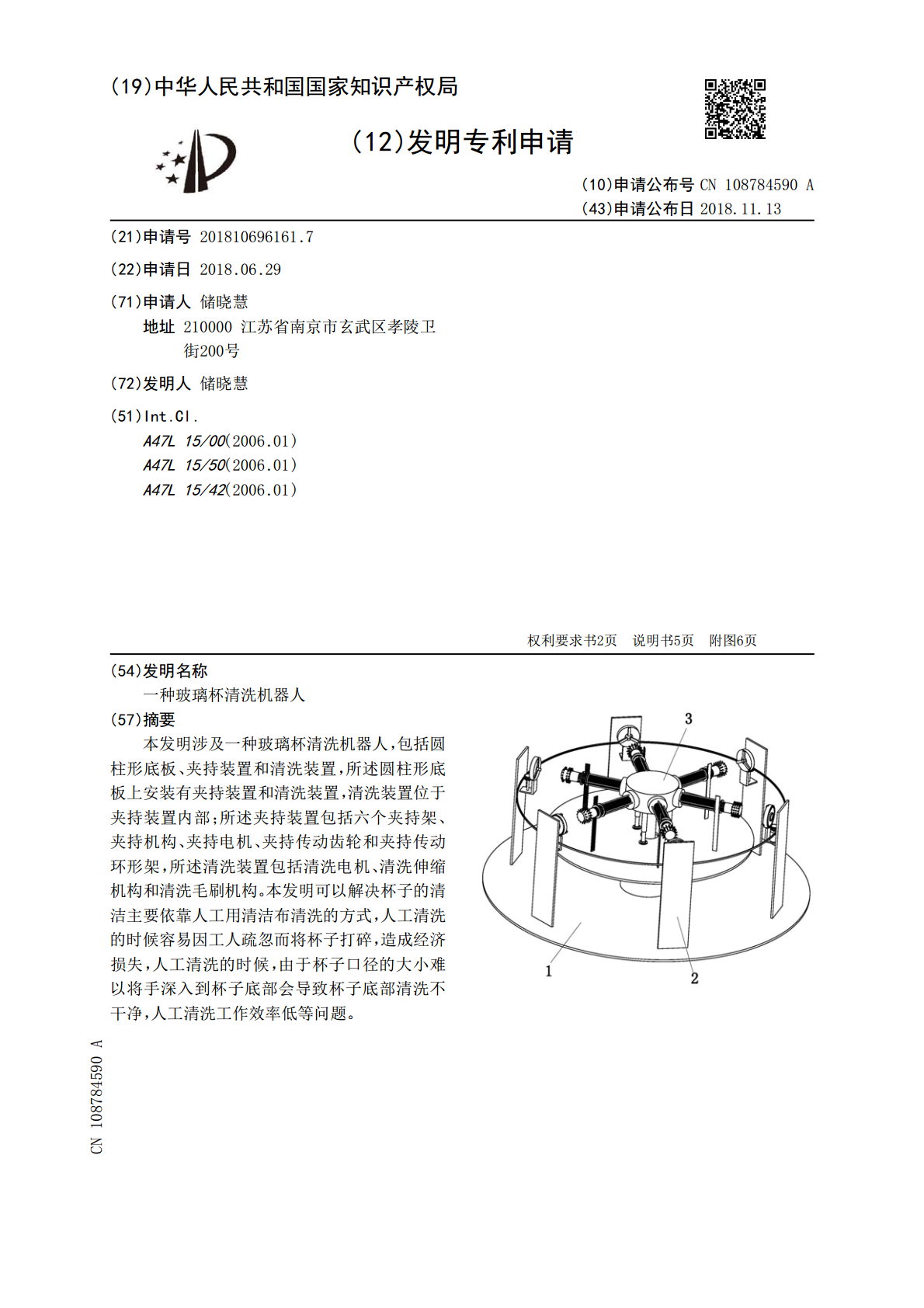
本发明涉及一种玻璃杯清洗机器人,包括圆柱形底板、夹持装置和清洗装置,所述圆柱形底板上安装有夹持装置和清洗装置,清洗装置位于夹持装置内部;所述夹持装置包括六个夹持架、夹持机构、夹持电机、夹持传动齿轮和夹持传动环形架,所述清洗装置包括清洗电机、清洗伸缩机构和清洗毛刷机构。本发明可以解决杯子的清洁主要依靠人工用清洁布清洗的方式,人工清洗的时候容易因工人疏忽而将杯子打碎,造成经济损失,人工清洗的时候,由于杯子口径的大小难以将手深入到杯子底部会导致杯子底部清洗不干净,人工清洗工作效率低等问题。
一种可对玻璃杯自动化清洗的智能机器人.pdf
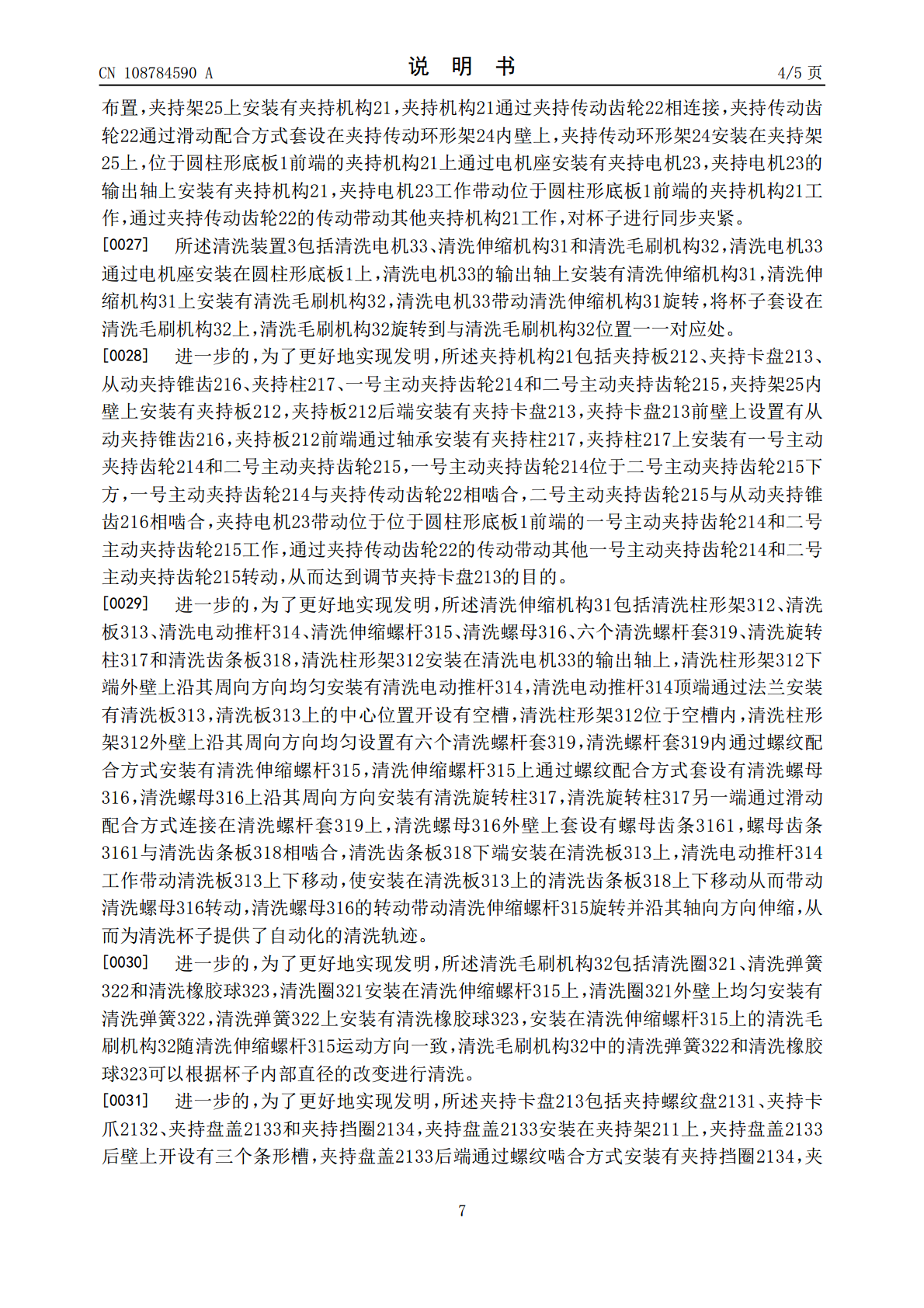
本发明涉及一种可对玻璃杯自动化清洗的智能机器人,包括圆柱形底板、夹持装置和清洗装置,所述圆柱形底板上安装有夹持装置和清洗装置,清洗装置位于夹持装置内部,所述清洗装置包括清洗电机、清洗柱形架、清洗板、清洗电动推杆、清洗伸缩螺杆、清洗螺母、六个清洗螺杆套、清洗旋转柱和清洗齿条板,夹持装置包括六个夹持架、夹持机构、夹持电机、夹持传动齿轮和夹持传动环形架。本发明解决了杯子的清洁主要依靠人工用清洁布清洗的方式,人工清洗的时候容易因工人疏忽而将杯子打碎,造成经济损失,人工清洗的时候,无需借助外来工具对杯身比较长的杯子
一种玻璃杯清洗设备.pdf
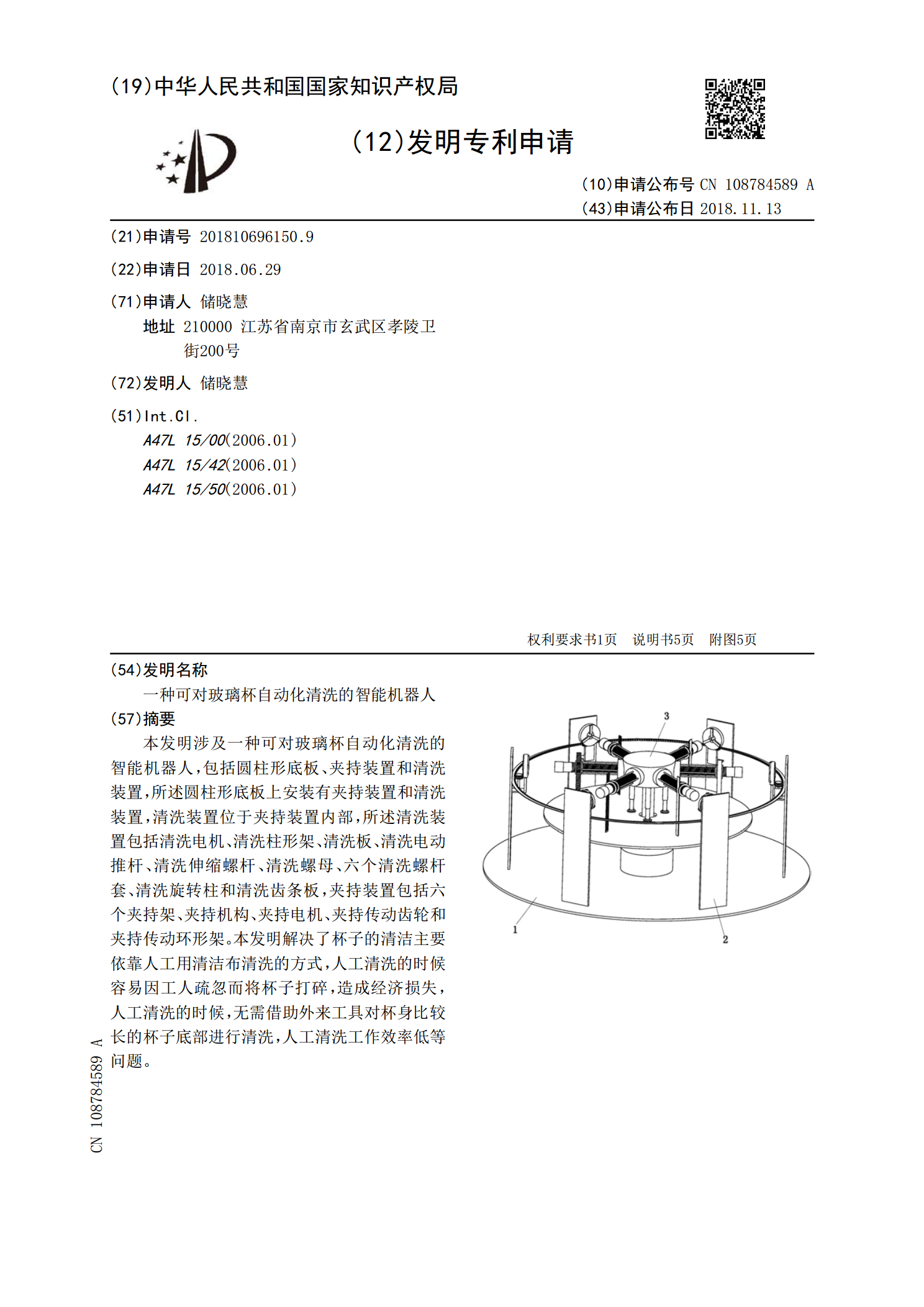
本发明为一种玻璃杯清洗设备,它包括第一框架,其底部一侧连接有多个支撑柱;支撑弹簧,第一框架顶部一侧连接有两个支撑弹簧,支撑弹簧的顶端之间连接有压板,压板上转动式连接有多个菱形杆,菱形杆穿过第一框架;刷子,菱形杆端部连接有刷子;第一支撑架,第一框架顶部靠近其中一个支撑弹簧的一侧连接有第一支撑架,第一支撑架内滑动式连接有楔形块,楔形块与压板配合,第一框架一侧铰接连接有第一盖板。本发明通过放置板能够放置多个玻璃杯,通过注水机构能够将清水注入玻璃杯内,通过转动机构能够使多个菱形杆同时进行转动,多个菱形杆转动能够带

一种玻璃杯清洗装置.pdf
本发明公开了一种玻璃杯清洗装置,包括箱体,所述箱体中设有入口空间,所述入口空间的右侧壁与外界连通,所述入口空间的上侧壁连通有调整空间,所述入口空间的下侧壁连通有送入空间,所述送入空间的下侧壁连通有传动空间,所述入口空间的下侧壁连通有下滑空间,所述下滑空间的左侧壁连通有缓冲腔,所述缓冲腔的一侧与所述下滑空间的底壁相通,所述下滑空间的右侧壁连通有出口空间,本发明可以在杯子使用产生茶垢或其他残留物或者灰尘后,自动清洗玻璃杯,在杯子送入本发明后可以自动调整待清洗玻璃杯的方向,也有用于缓冲的功能,防止玻璃杯滑落而摔
一种玻璃杯清洗装置.pdf
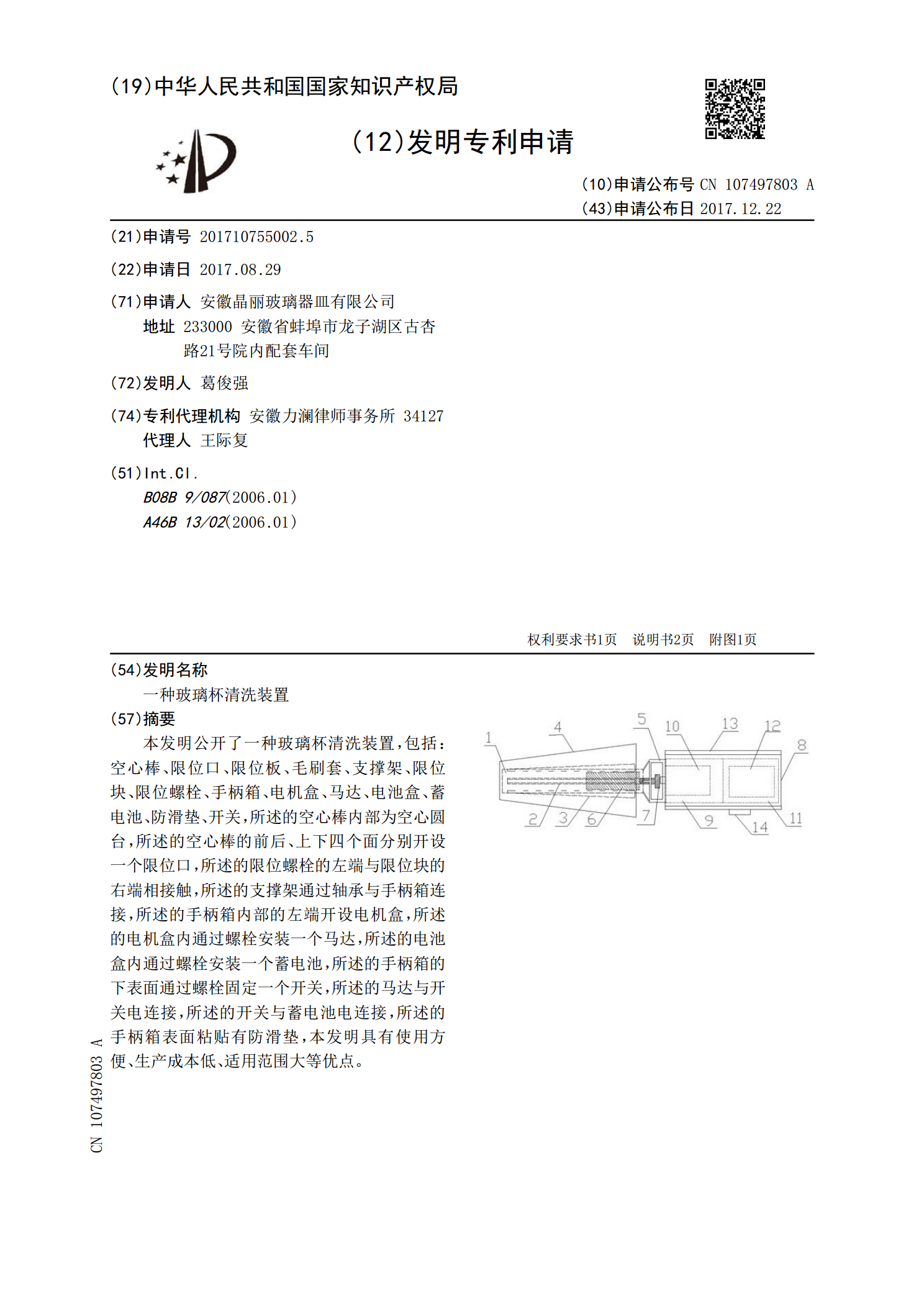
本发明公开了一种玻璃杯清洗装置,包括:空心棒、限位口、限位板、毛刷套、支撑架、限位块、限位螺栓、手柄箱、电机盒、马达、电池盒、蓄电池、防滑垫、开关,所述的空心棒内部为空心圆台,所述的空心棒的前后、上下四个面分别开设一个限位口,所述的限位螺栓的左端与限位块的右端相接触,所述的支撑架通过轴承与手柄箱连接,所述的手柄箱内部的左端开设电机盒,所述的电机盒内通过螺栓安装一个马达,所述的电池盒内通过螺栓安装一个蓄电池,所述的手柄箱的下表面通过螺栓固定一个开关,所述的马达与开关电连接,所述的开关与蓄电池电连接,所述的手