
用于计算道路摩擦估计值的方法和系统.pdf

一吃****新冬

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于计算道路摩擦估计值的方法和系统.pdf
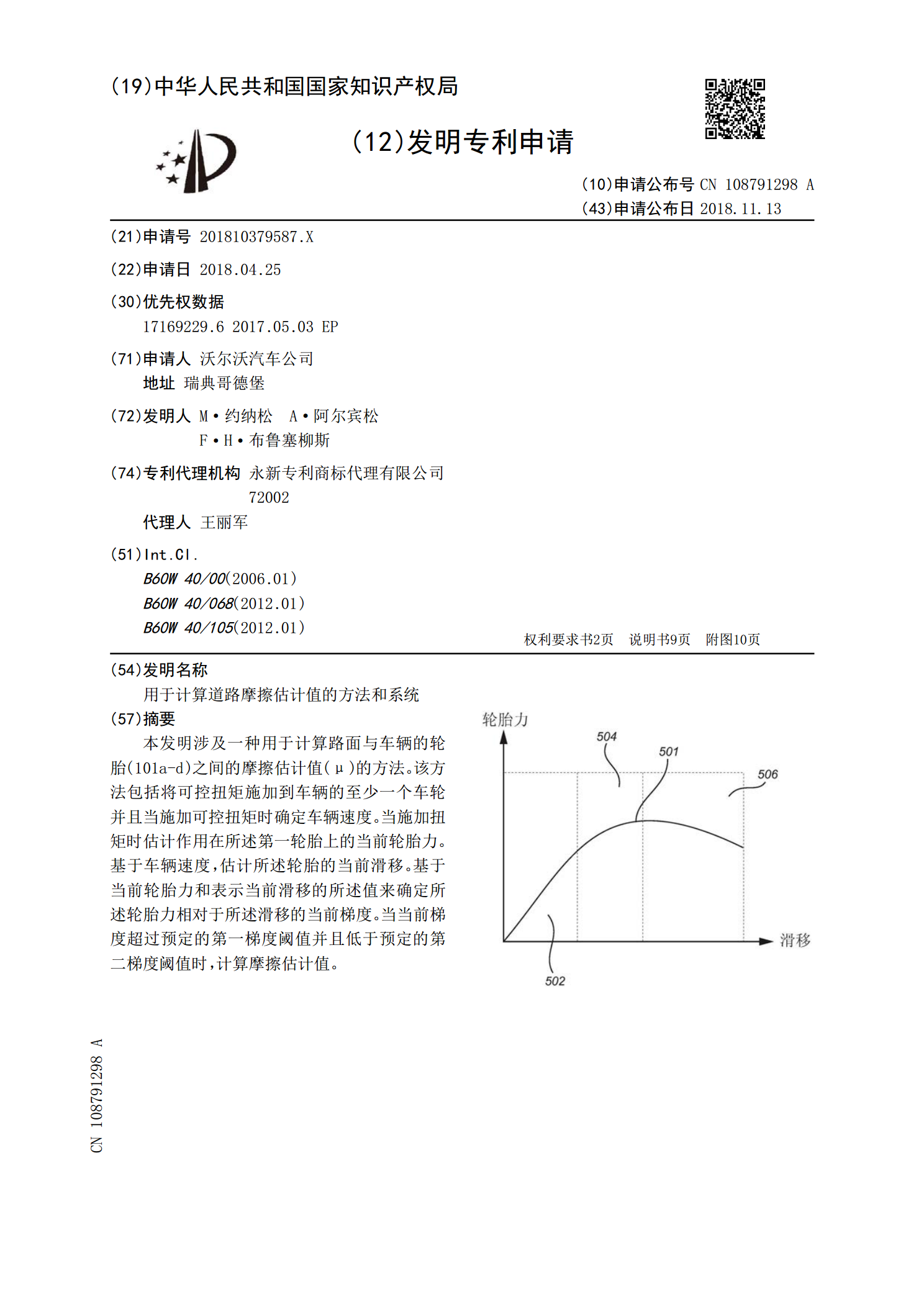
本发明涉及一种用于计算路面与车辆的轮胎(101a‑d)之间的摩擦估计值(μ)的方法。该方法包括将可控扭矩施加到车辆的至少一个车轮并且当施加可控扭矩时确定车辆速度。当施加扭矩时估计作用在所述第一轮胎上的当前轮胎力。基于车辆速度,估计所述轮胎的当前滑移。基于当前轮胎力和表示当前滑移的所述值来确定所述轮胎力相对于所述滑移的当前梯度。当当前梯度超过预定的第一梯度阈值并且低于预定的第二梯度阈值时,计算摩擦估计值。
用于计算道路摩擦力估算的方法和系统.pdf
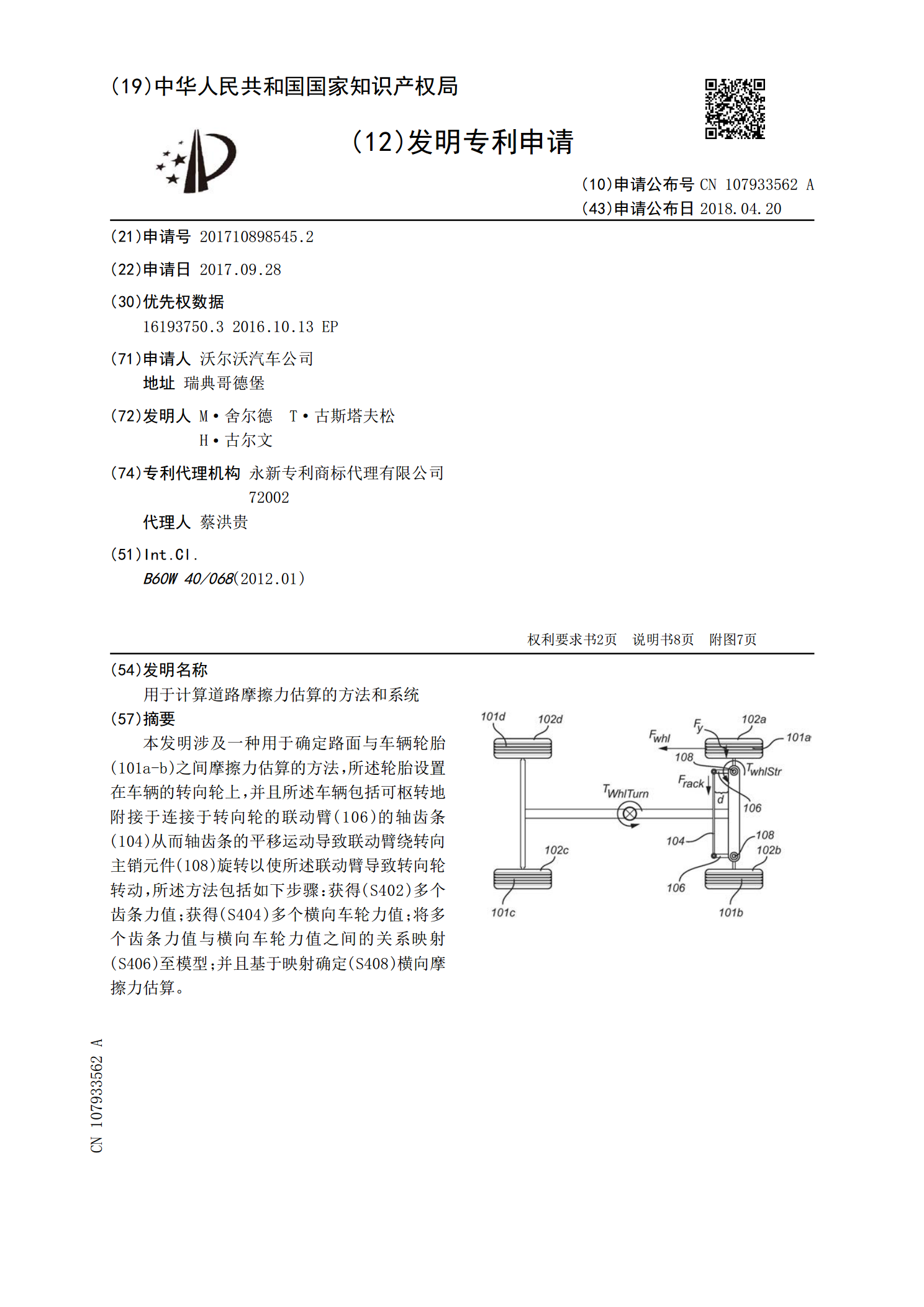
本发明涉及一种用于确定路面与车辆轮胎(101a‑b)之间摩擦力估算的方法,所述轮胎设置在车辆的转向轮上,并且所述车辆包括可枢转地附接于连接于转向轮的联动臂(106)的轴齿条(104)从而轴齿条的平移运动导致联动臂绕转向主销元件(108)旋转以使所述联动臂导致转向轮转动,所述方法包括如下步骤:获得(S402)多个齿条力值;获得(S404)多个横向车轮力值;将多个齿条力值与横向车轮力值之间的关系映射(S406)至模型;并且基于映射确定(S408)横向摩擦力估算。

用于计算道路摩擦力估计的方法和系统.pdf
本发明涉及一种用于在车辆(100)正沿路线开动时计算路面和所述车辆的轮胎(101a‑d)之间的摩擦力估计(μ)的方法,所述轮胎布置在所述车辆的可转向车轮(102a‑b)上,并且所述车辆包括两个前车轮(102a‑b)和两个后车轮(102c‑d)以及轴架(104),所述轴架可枢转地附接到连接到所述可转向车轮的连杆臂(106),以使得所述轴架的平移运动导致所述连杆臂绕中心立轴元件(108)旋转,以便所述连杆臂导致所述可转向车轮的回转运动。本发明还涉及相应的系统和车辆。
用于确定车辆中轮胎-道路摩擦的方法和系统.pdf
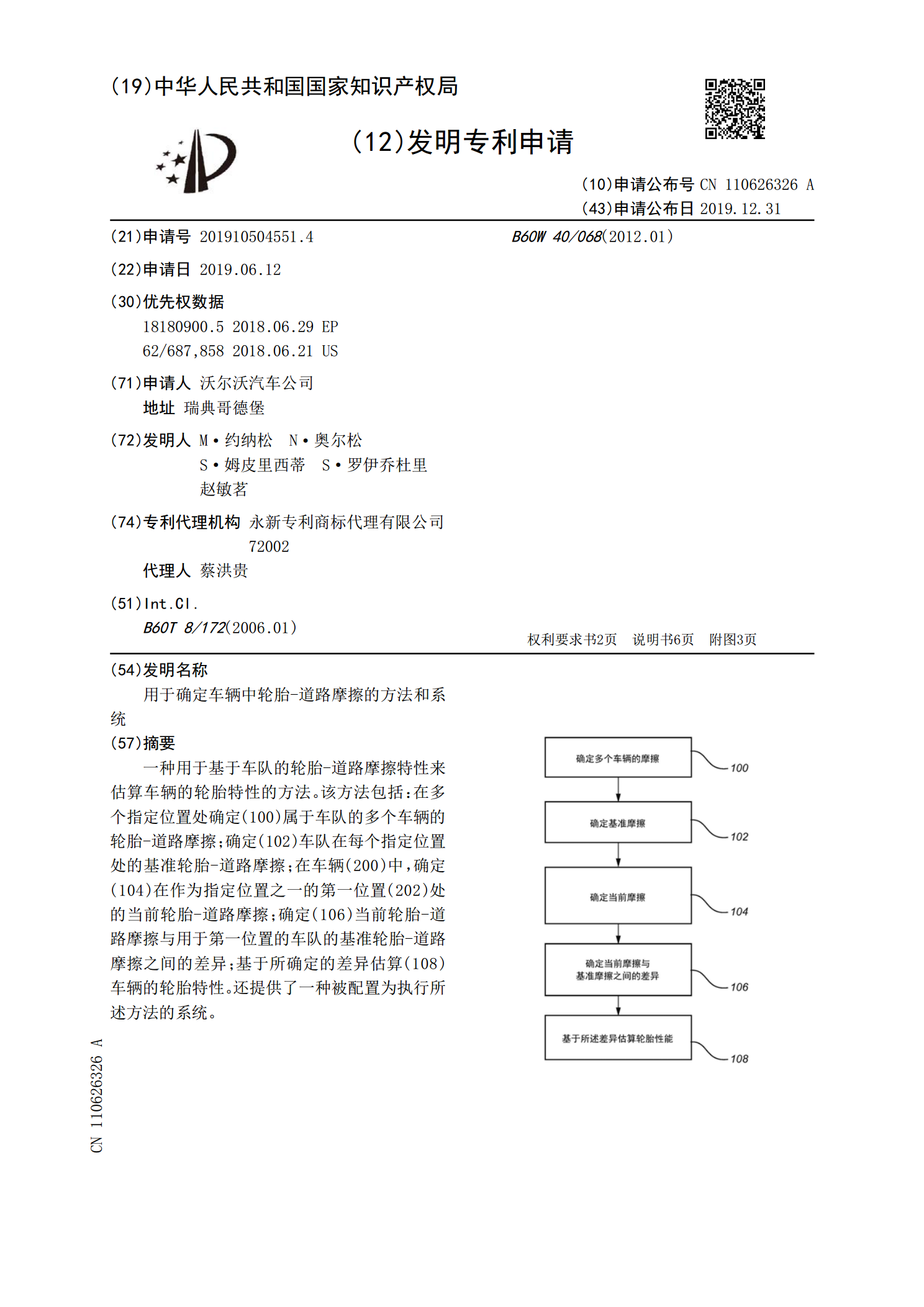
一种用于基于车队的轮胎‑道路摩擦特性来估算车辆的轮胎特性的方法。该方法包括:在多个指定位置处确定(100)属于车队的多个车辆的轮胎‑道路摩擦;确定(102)车队在每个指定位置处的基准轮胎‑道路摩擦;在车辆(200)中,确定(104)在作为指定位置之一的第一位置(202)处的当前轮胎‑道路摩擦;确定(106)当前轮胎‑道路摩擦与用于第一位置的车队的基准轮胎‑道路摩擦之间的差异;基于所确定的差异估算(108)车辆的轮胎特性。还提供了一种被配置为执行所述方法的系统。
用于控制车辆轮胎-道路摩擦估计的方法和系统.pdf
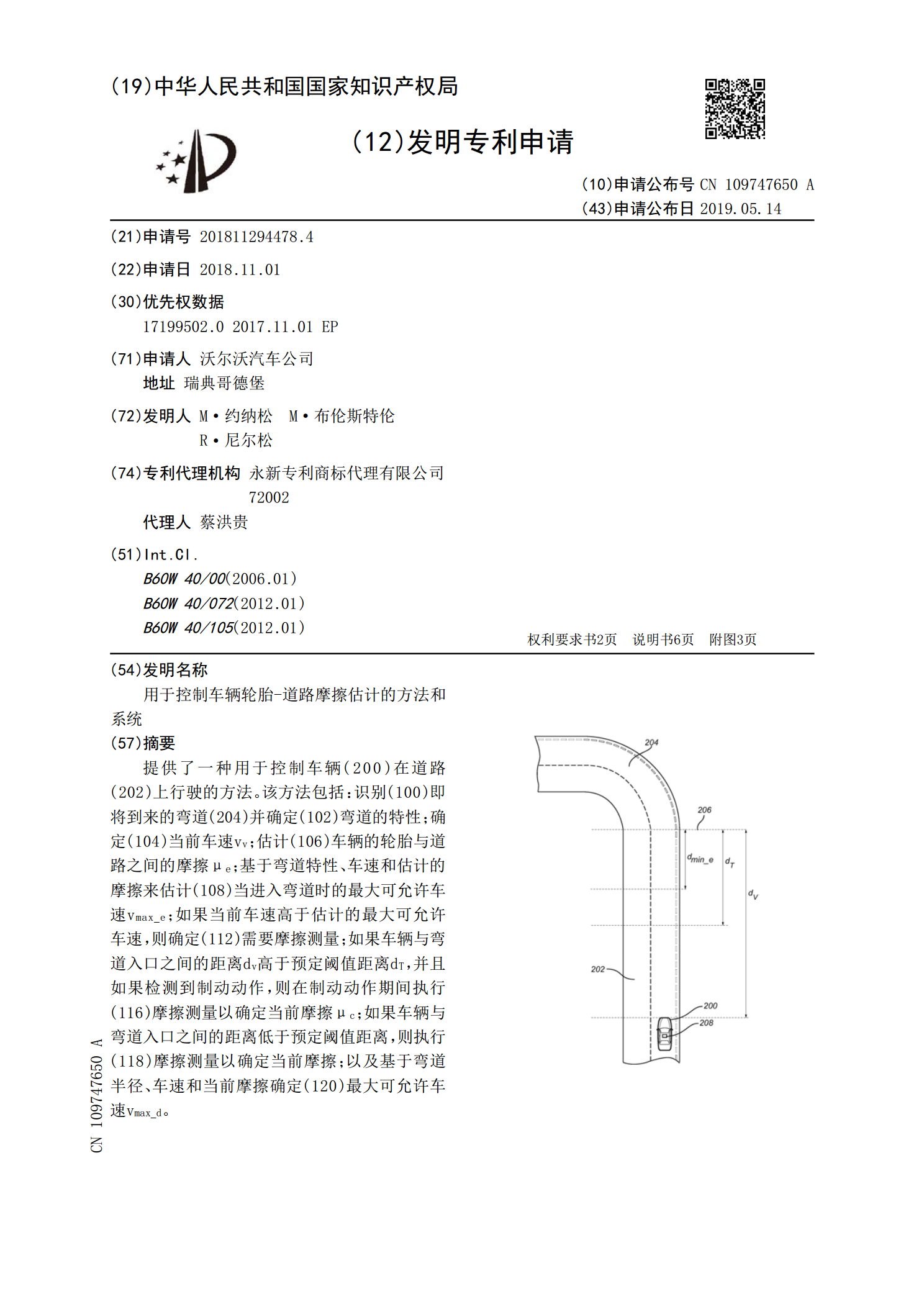
提供了一种用于控制车辆(200)在道路(202)上行驶的方法。该方法包括:识别(100)即将到来的弯道(204)并确定(102)弯道的特性;确定(104)当前车速v