
一种并网调频型飞轮储能系统充电过程中的转速控制方法.pdf

森林****来了


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种并网调频型飞轮储能系统充电过程中的转速控制方法.pdf
本发明提出了一种并网调频型飞轮储能系统充电过程中的转速控制方法,采用连续参考转速曲线减小系统充电过程中转子承受的振动和冲击;对于轴上安装有飞轮转子的永磁同步电机,在外环转速控制中,通过自适应补偿方法,对内部参数和外部负载进行估算;随后将估算结果与鲁棒控制器的输出结果叠加,作为q轴参考电流提供给内环电流控制,然后获得q轴控制输入电流,精确控制转子转速。本发明将连续参考转速曲线、鲁棒控制、自适应补偿、线性控制相结合,能够有效提高调频型飞轮储能系统充电过程中的系统性能,改善转速跟踪误差。

电网调频型飞轮储能系统自适应鲁棒充电控制方法研究.pptx
,目录PartOne飞轮储能系统的基本原理电网调频型飞轮储能系统的特点飞轮储能系统在电力系统中的作用PartTwo充电控制方法的分类和比较自适应鲁棒充电控制方法的原理自适应鲁棒充电控制方法的实现过程自适应鲁棒充电控制方法的优势和局限性PartThree电网调频型飞轮储能系统的充电需求自适应鲁棒充电控制方法在飞轮储能系统中的应用实例自适应鲁棒充电控制方法在飞轮储能系统中的效果评估PartFour自适应鲁棒充电控制方法的优化方向自适应鲁棒充电控制方法的发展趋势自适应鲁棒充电控制方法的前景展望PartFive研

一种飞轮储能系统并网控制方法及其储能系统.pdf
一种飞轮储能系统并网控制方法及其储能系统,其电网侧变流器控制方法是将静止坐标系下的电网侧电流ia1、ib1、ic1与变流器侧电流ia2、ib2、ic2分别变换为两相旋转坐标系下的直流分量id1、iq1与id2、iq2,将此两相旋转坐标系下的直流分量作为旋转坐标系下电网侧变流器控制的反馈信号,以控制飞轮储能系统并网有功与无功功率的大小及流向。其电机侧变流器控制方法是将静止坐标系下的电机定子电流ia3、ib3、ic3变换为两相旋转坐标系下的直流分量id3、iq3,将id3、iq3及直流母线电压Udc作为旋转坐
一种飞轮储能系统并网运行控制方法.pdf
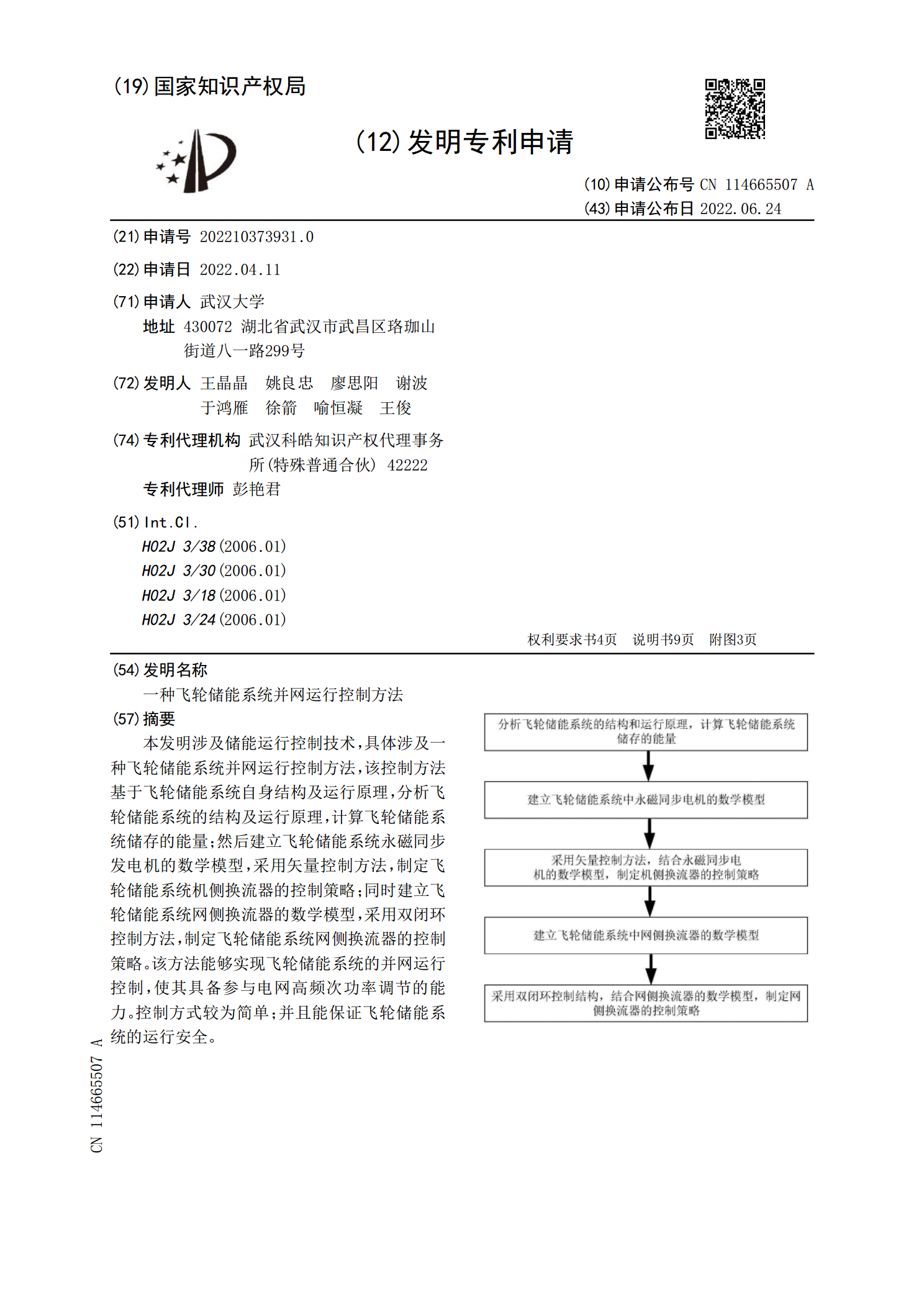
本发明涉及储能运行控制技术,具体涉及一种飞轮储能系统并网运行控制方法,该控制方法基于飞轮储能系统自身结构及运行原理,分析飞轮储能系统的结构及运行原理,计算飞轮储能系统储存的能量;然后建立飞轮储能系统永磁同步发电机的数学模型,采用矢量控制方法,制定飞轮储能系统机侧换流器的控制策略;同时建立飞轮储能系统网侧换流器的数学模型,采用双闭环控制方法,制定飞轮储能系统网侧换流器的控制策略。该方法能够实现飞轮储能系统的并网运行控制,使其具备参与电网高频次功率调节的能力。控制方式较为简单;并且能保证飞轮储能系统的运行安全

针对并网型风储微网的飞轮储能阵列系统控制方法.docx
针对并网型风储微网的飞轮储能阵列系统控制方法飞轮储能阵列是一种高效、快速响应且具有较长寿命的储能技术,被广泛应用于并网型风储微网系统中。为了保证系统的稳定运行和优化性能,对飞轮储能阵列的控制方法进行研究具有重要意义。本论文将针对并网型风储微网的飞轮储能阵列系统控制方法进行深入研究和探讨。首先,我们需要了解飞轮储能阵列的基本原理和结构。飞轮储能阵列由多个飞轮组成,每个飞轮都通过电动机进行加速,并通过功率电子变流器将其动能转化为电能。飞轮之间通过耦合装置连接,以实现能量的传递和分配。系统中还需配置监测和控制单