
一种狭长腔体的内膛轮廓测量方法.pdf

婀娜****aj

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种狭长腔体的内膛轮廓测量方法.pdf
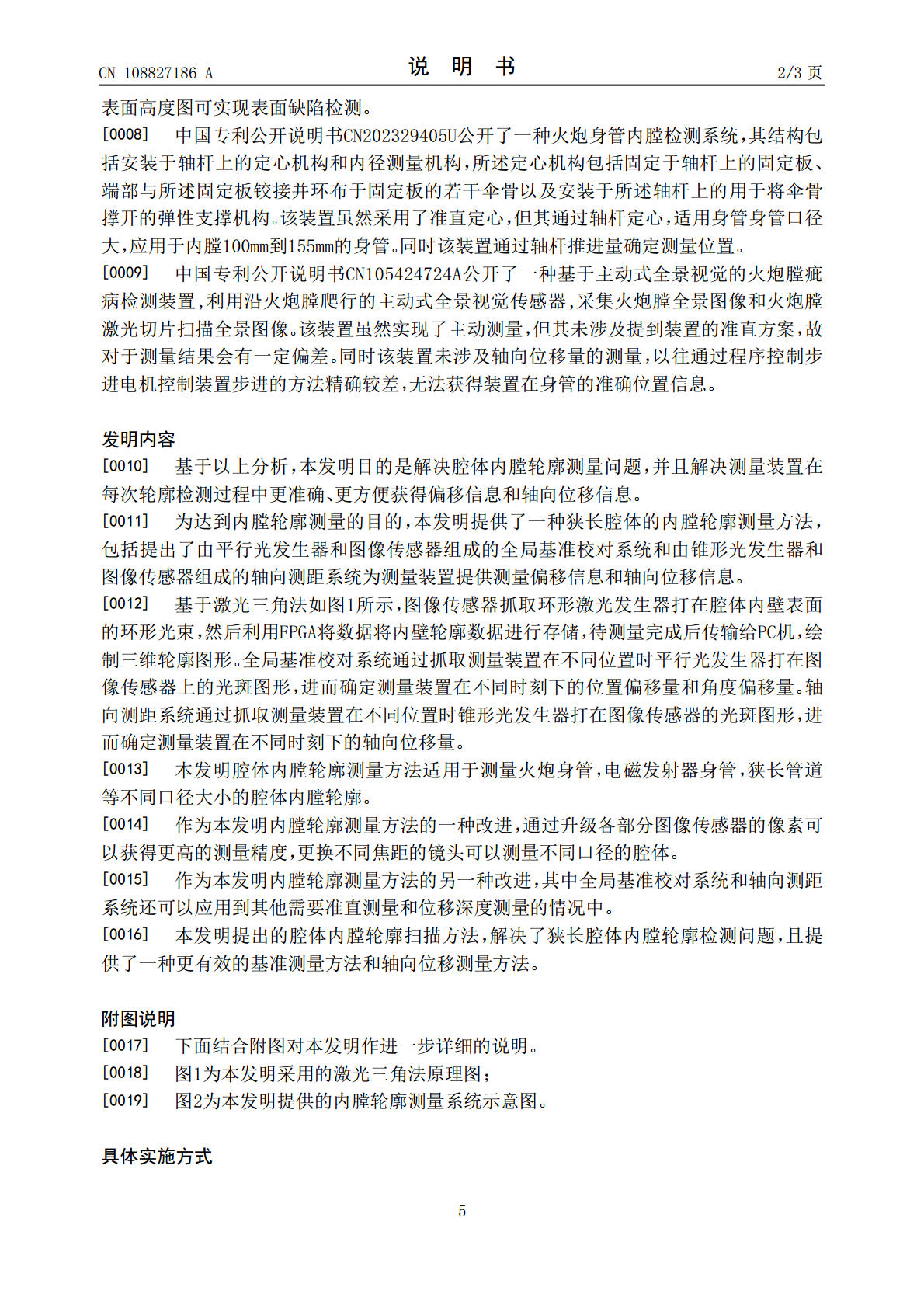
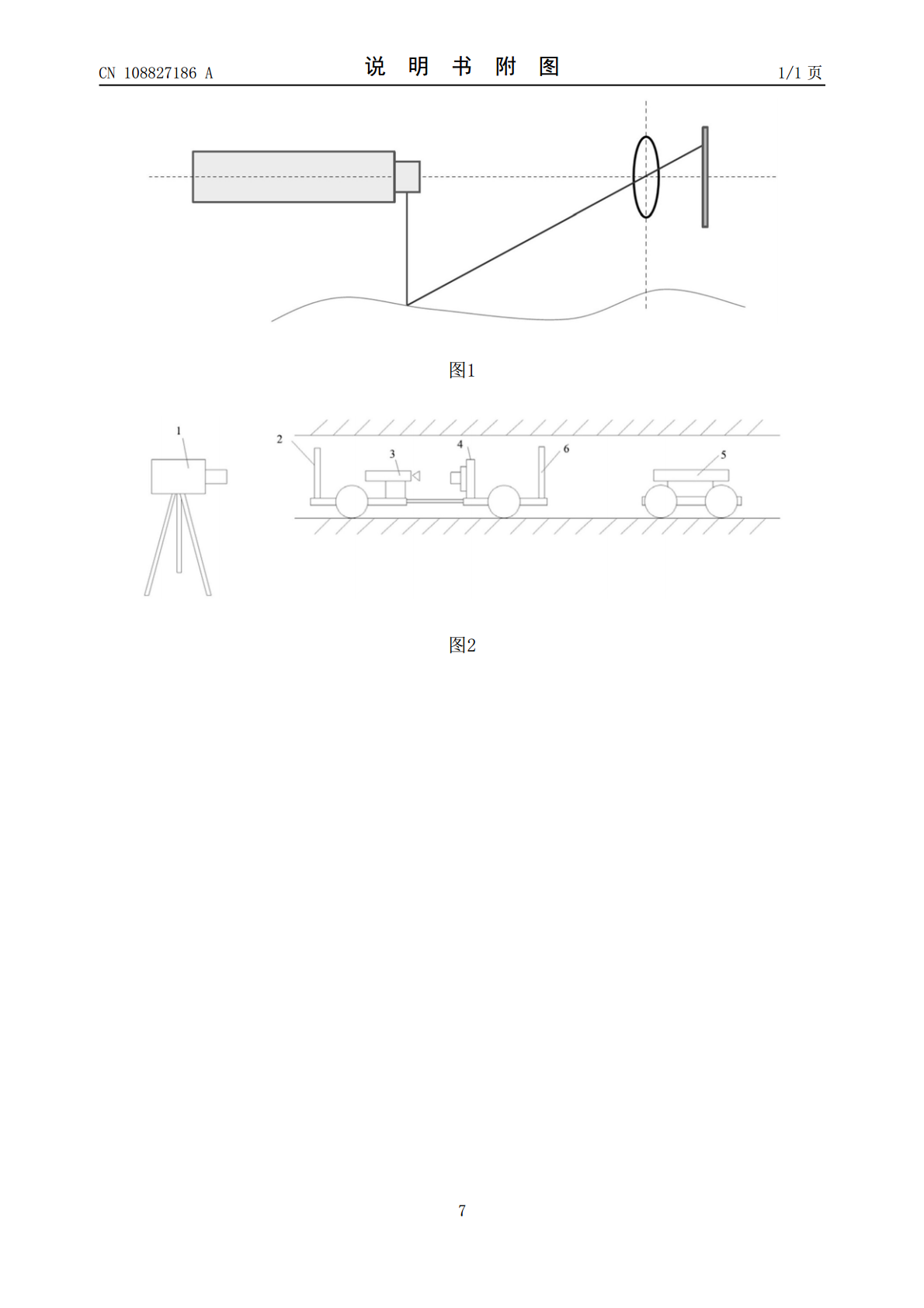
本发明公开了一种针对狭长腔体内膛轮廓测量方法,该方法实现了快速、准确地在线自动测量。同时该方法提供了一种光学基准校对方法,和一种轴向测距方法。通过全局基准校对系统获取测量装置和平行光束的相对夹角和相对横向位移,最终为整个系统提供全局准直校对方案;通过轴向测距系统获取测量装置和锥形光发生器的轴向距离,最终为整个系统提供轴向位移信息。本发明腔体内膛轮廓测量方法适用于测量火炮身管,电磁发射器身管,狭长管道等不同口径大小的腔体内膛轮廓。本发明提出的腔体内膛轮廓扫描方法,解决了狭长腔体内膛轮廓检测问题,且提供了一种
一种轮胎内轮廓测量方法.pdf
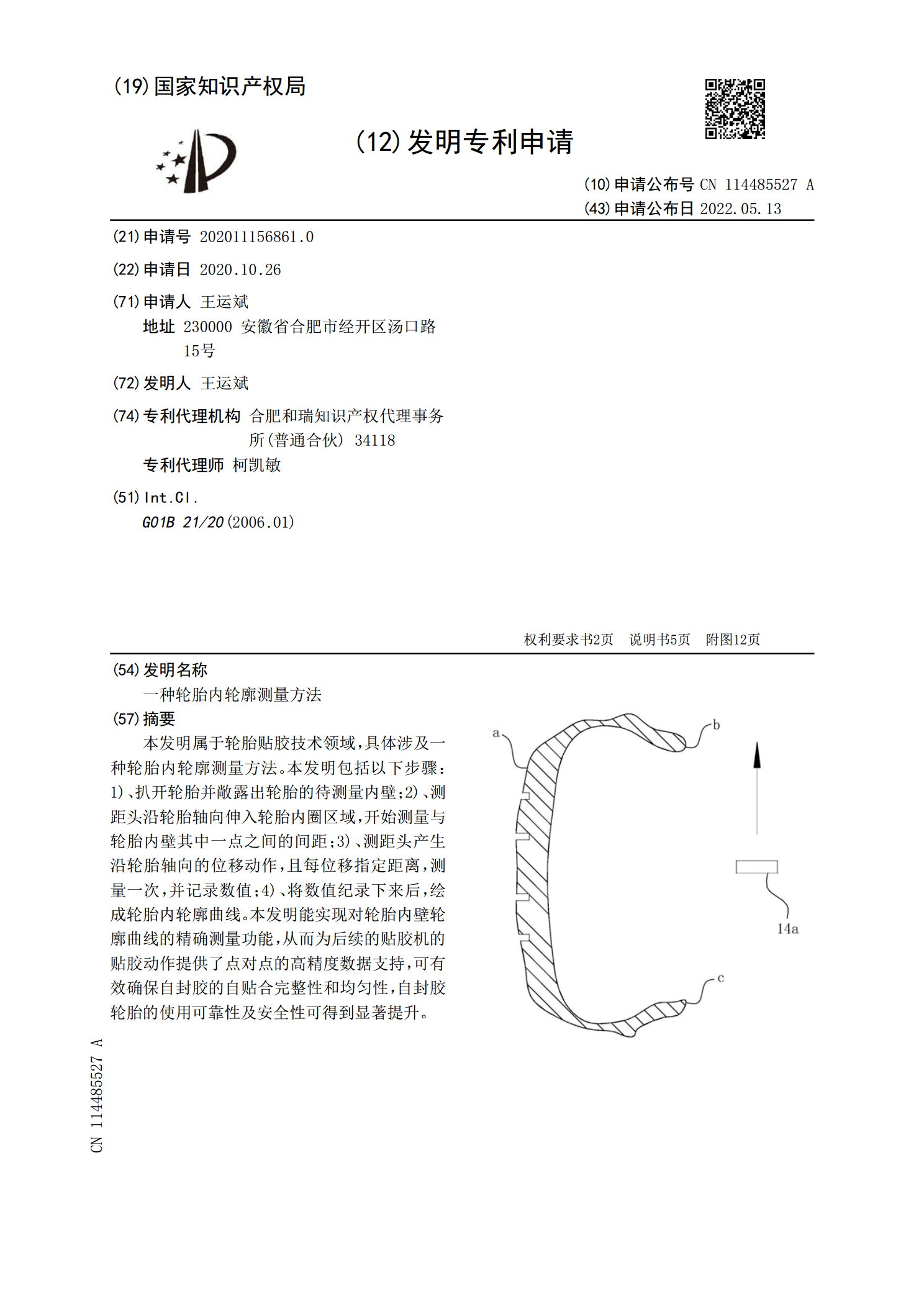
本发明属于轮胎贴胶技术领域,具体涉及一种轮胎内轮廓测量方法。本发明包括以下步骤:1)、扒开轮胎并敞露出轮胎的待测量内壁;2)、测距头沿轮胎轴向伸入轮胎内圈区域,开始测量与轮胎内壁其中一点之间的间距;3)、测距头产生沿轮胎轴向的位移动作,且每位移指定距离,测量一次,并记录数值;4)、将数值纪录下来后,绘成轮胎内轮廓曲线。本发明能实现对轮胎内壁轮廓曲线的精确测量功能,从而为后续的贴胶机的贴胶动作提供了点对点的高精度数据支持,可有效确保自封胶的自贴合完整性和均匀性,自封胶轮胎的使用可靠性及安全性可得到显著提升。
一种曲面轮廓测量方法.pdf
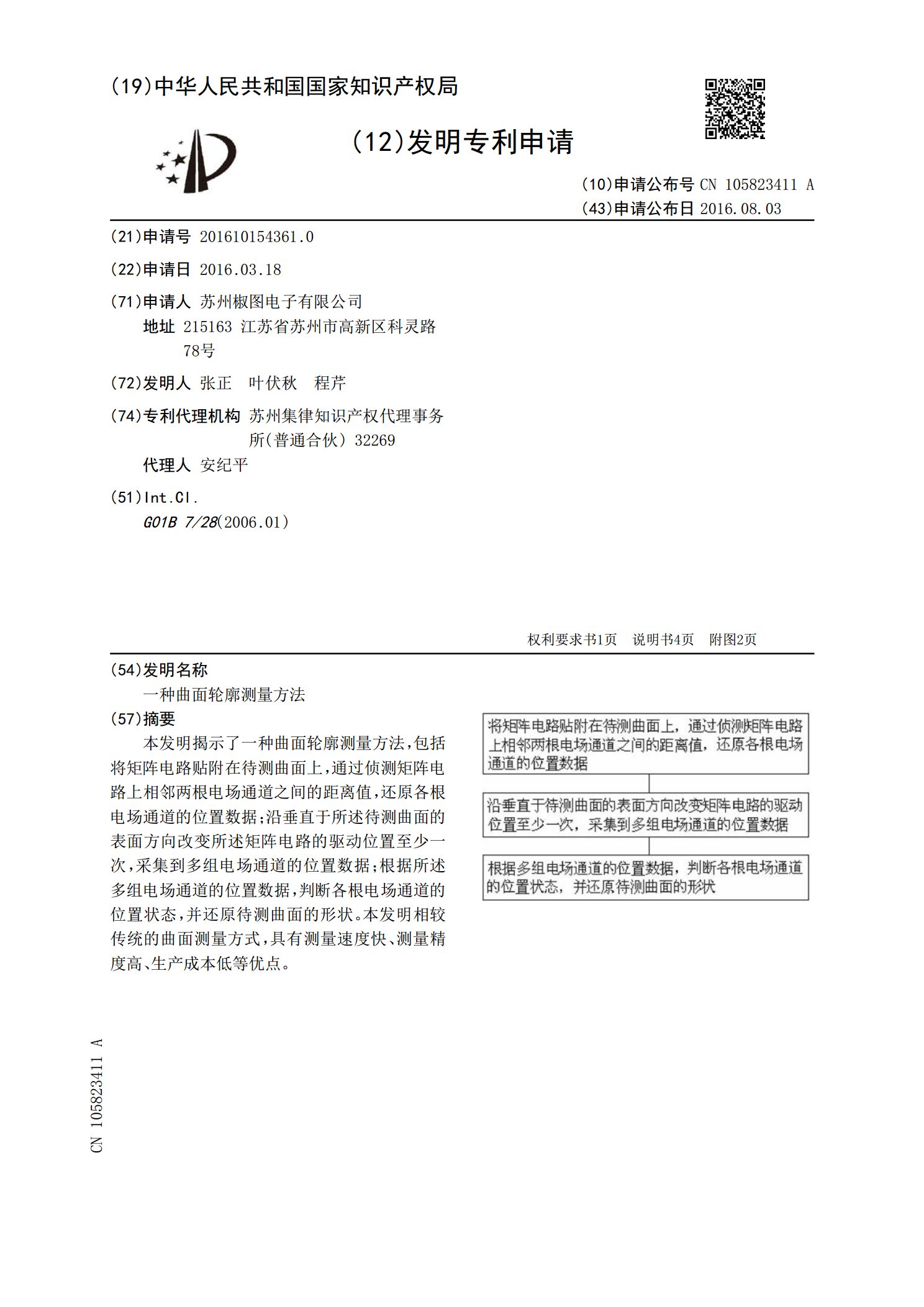
本发明揭示了一种曲面轮廓测量方法,包括将矩阵电路贴附在待测曲面上,通过侦测矩阵电路上相邻两根电场通道之间的距离值,还原各根电场通道的位置数据;沿垂直于所述待测曲面的表面方向改变所述矩阵电路的驱动位置至少一次,采集到多组电场通道的位置数据;根据所述多组电场通道的位置数据,判断各根电场通道的位置状态,并还原待测曲面的形状。本发明相较传统的曲面测量方式,具有测量速度快、测量精度高、生产成本低等优点。
一种人体轮廓测量方法.pdf
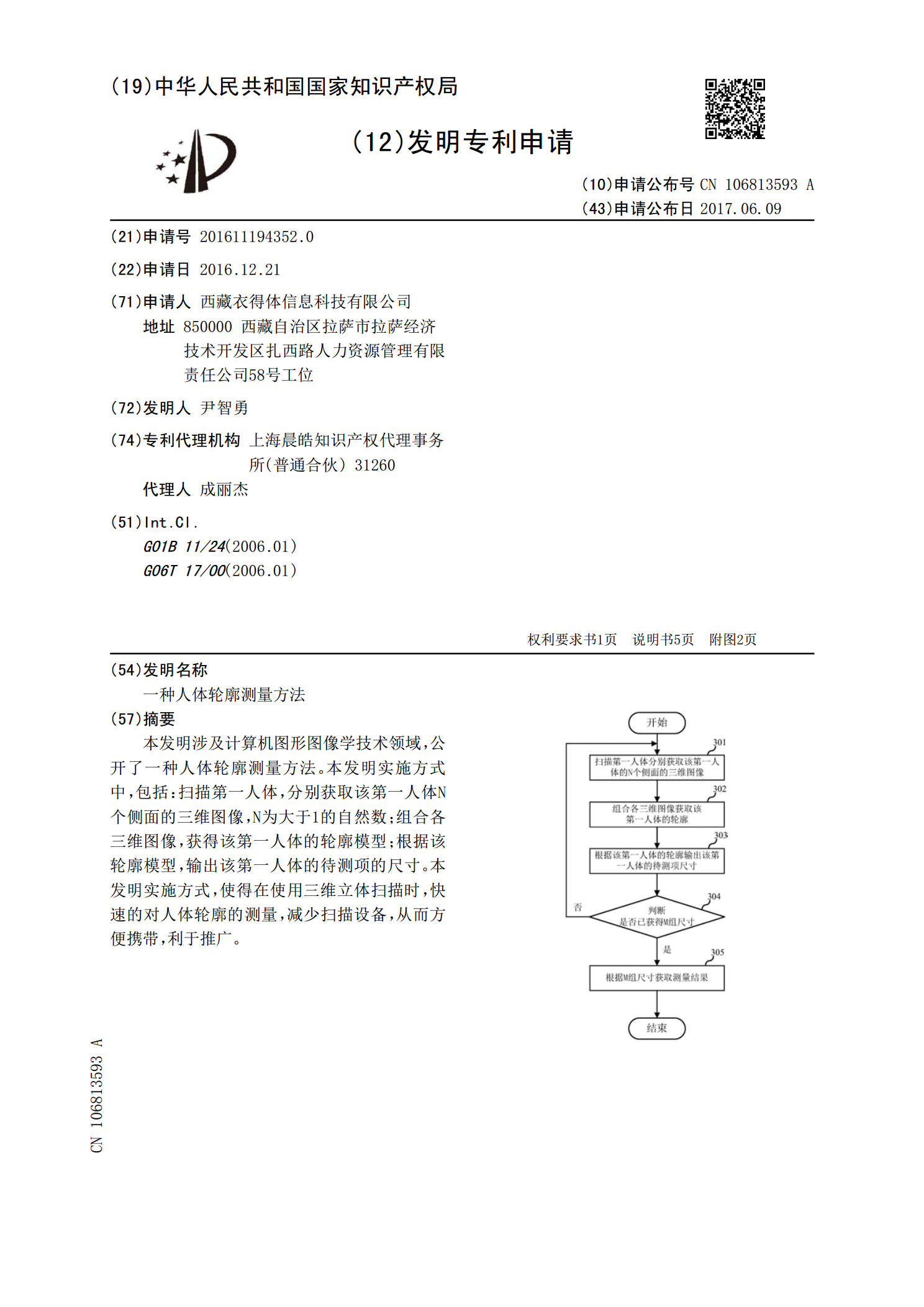
本发明涉及计算机图形图像学技术领域,公开了一种人体轮廓测量方法。本发明实施方式中,包括:扫描第一人体,分别获取该第一人体N个侧面的三维图像,N为大于1的自然数;组合各三维图像,获得该第一人体的轮廓模型;根据该轮廓模型,输出该第一人体的待测项的尺寸。本发明实施方式,使得在使用三维立体扫描时,快速的对人体轮廓的测量,减少扫描设备,从而方便携带,利于推广。

基于形态分层的膛内高速运动体摆动角度测量方法研究.docx
基于形态分层的膛内高速运动体摆动角度测量方法研究摘要:本文研究的主要是一种基于形态分层的膛内高速运动体摆动角度测量方法。该方法主要运用了形态分层的理论与算法,通过对高速运动体运动过程中的形态进行分层处理,得到了高速运动体不同时间点的形态信息,从而实现了对高速运动体摆动角度的测量。实验结果表明,本文所提出的方法可以有效地实现高速运动体摆动角度的测量,具有较高的精度和准确性。关键词:形态分层;高速运动体;摆动角度测量;精度;准确性正文:引言高速运动体(如子弹、炮弹等)在飞行过程中往往会出现一定的摆动角度,而这