
一种自动驾驶车辆半实物仿真测试系统及方法.pdf

元容****少女

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动驾驶车辆半实物仿真测试系统及方法.pdf
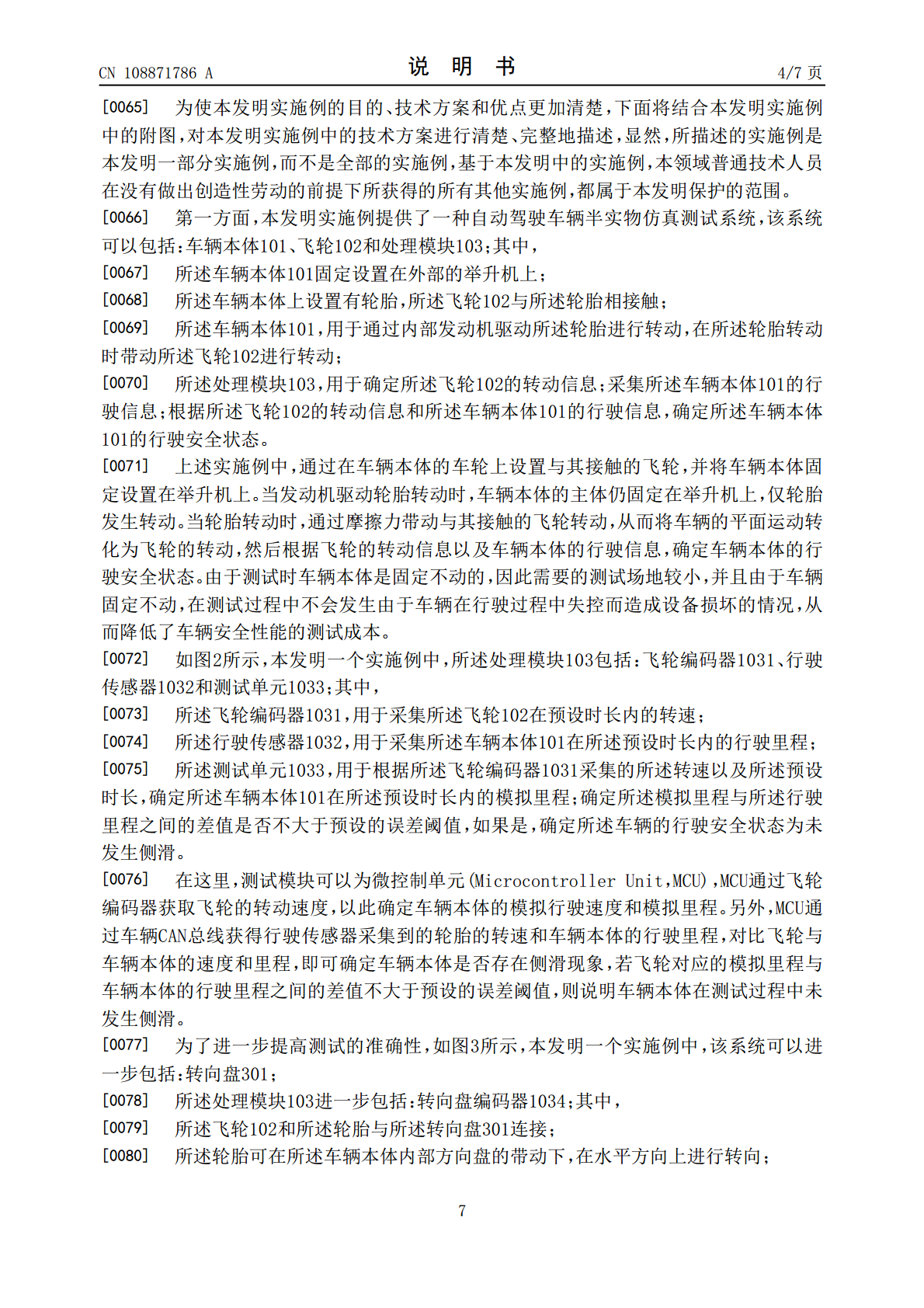
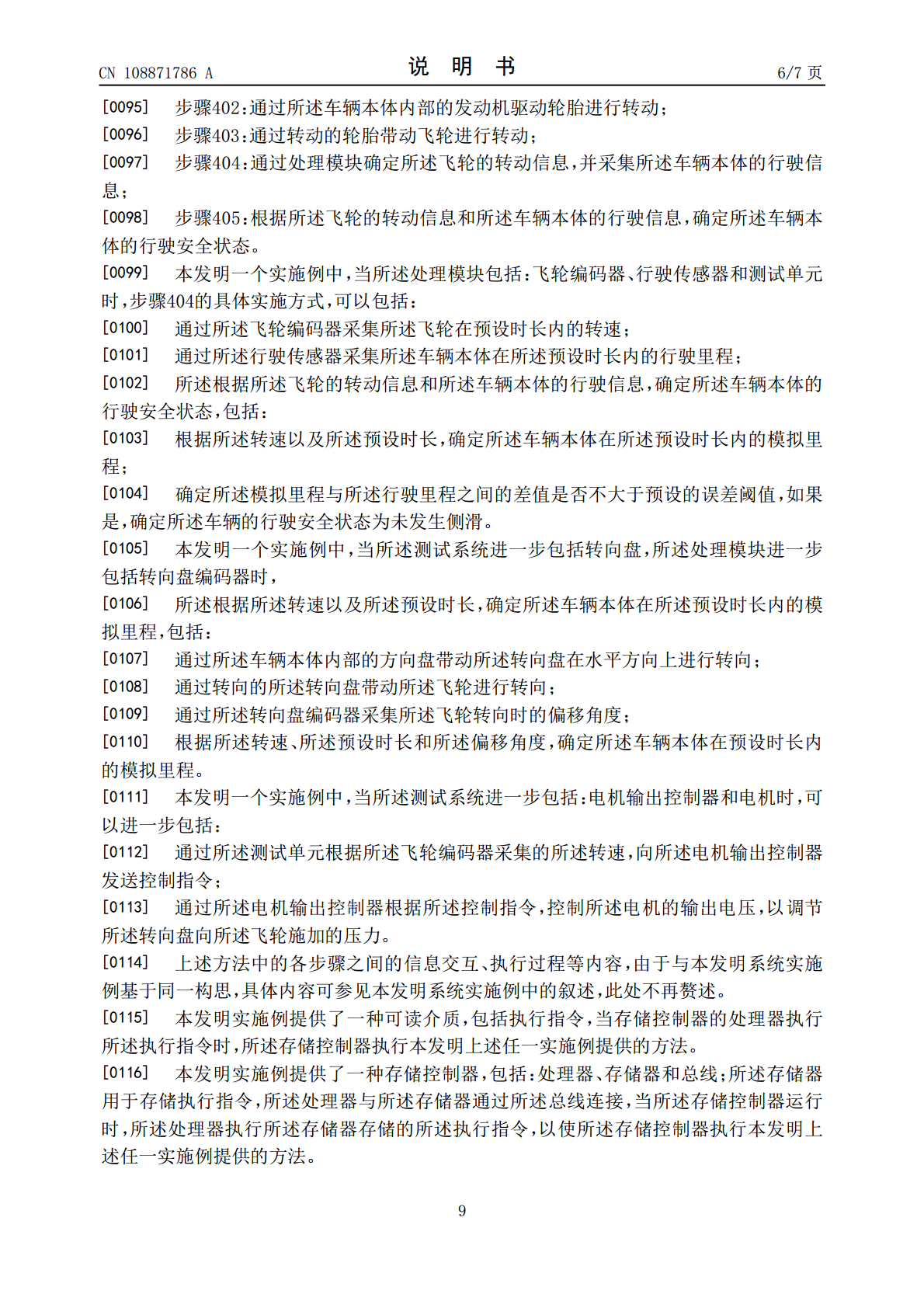
本发明提供了一种自动驾驶车辆半实物仿真测试系统及方法,该系统包括:车辆本体、飞轮和处理模块;其中,所述车辆本体固定设置在外部的举升机上;所述车辆本体上设置有轮胎,所述飞轮与所述轮胎相接触;所述车辆本体,用于通过内部发动机驱动所述轮胎进行转动,在所述轮胎转动时带动所述飞轮进行转动;所述处理模块,用于确定所述飞轮的转动信息;采集所述车辆本体的行驶信息;根据所述飞轮的转动信息和所述车辆本体的行驶信息,确定所述车辆本体的行驶安全状态。本方案所需测试场地较小,并且能更好的保证测试过程中自动驾驶车辆上的传感器等设备不

一种模拟飞轮半实物仿真系统及方法.pdf
本发明一方面公开了一种模拟飞轮半实物仿真系统,包括星载计算模块、飞轮模拟模块和仿真计算模块;星载计算模块用于采集卫星姿态信息并处理得到输入飞轮的指令信息;飞轮模拟模块用于接收所述指令信息并处理得到飞轮输出的运动信息;仿真计算模块用于根据所述运动信息解算卫星的姿态,本发明还公开了一种应用该系统的模拟飞轮半实物仿真方法,解决飞轮器件参与半实物仿真损耗和试验精度等问题,设计模拟飞轮实现对姿态控制系统的验证需求。
城轨车辆牵引传动系统半实物仿真研究.pptx
汇报人:CONTENTSPARTONEPARTTWO城轨车辆牵引传动系统的组成城轨车辆牵引传动系统的功能城轨车辆牵引传动系统的工作原理PARTTHREE提高城轨车辆牵引传动系统的性能降低研发成本和缩短研发周期提高城轨车辆牵引传动系统的可靠性和安全性PARTFOUR建立数学模型选择合适的仿真软件和硬件设备搭建半实物仿真平台进行仿真实验和分析PARTFIVE案例一:某型城轨车辆牵引传动系统的半实物仿真研究案例二:某新型城轨车辆牵引传动系统的半实物仿真研究案例三:基于半实物仿真的城轨车辆牵引传动系统优化设计PA

地铁车辆直线电机驱动系统半实物仿真研究.docx
地铁车辆直线电机驱动系统半实物仿真研究1.研究背景和意义随着城市化进程的加速和人口增长的快速发展,地铁成为了现代城市交通中不可或缺的一部分。为了保证地铁的安全、效率和环保,地铁车辆的驱动系统需要不断升级和优化。而直线电机驱动系统是现代地铁车辆驱动系统中的一种先进技术,具有高效、低噪音、低维护等特点。因此,对地铁车辆直线电机驱动系统的研究和优化具有重要的理论和实际意义。2.直线电机的工作原理直线电机驱动系统是利用电磁力作用推动列车直线运动的一种技术。它是由定子和移子组成的。定子固定在地铁轨道上,移子固定在车
一种光电对抗效能评估半实物仿真系统及方法.pdf
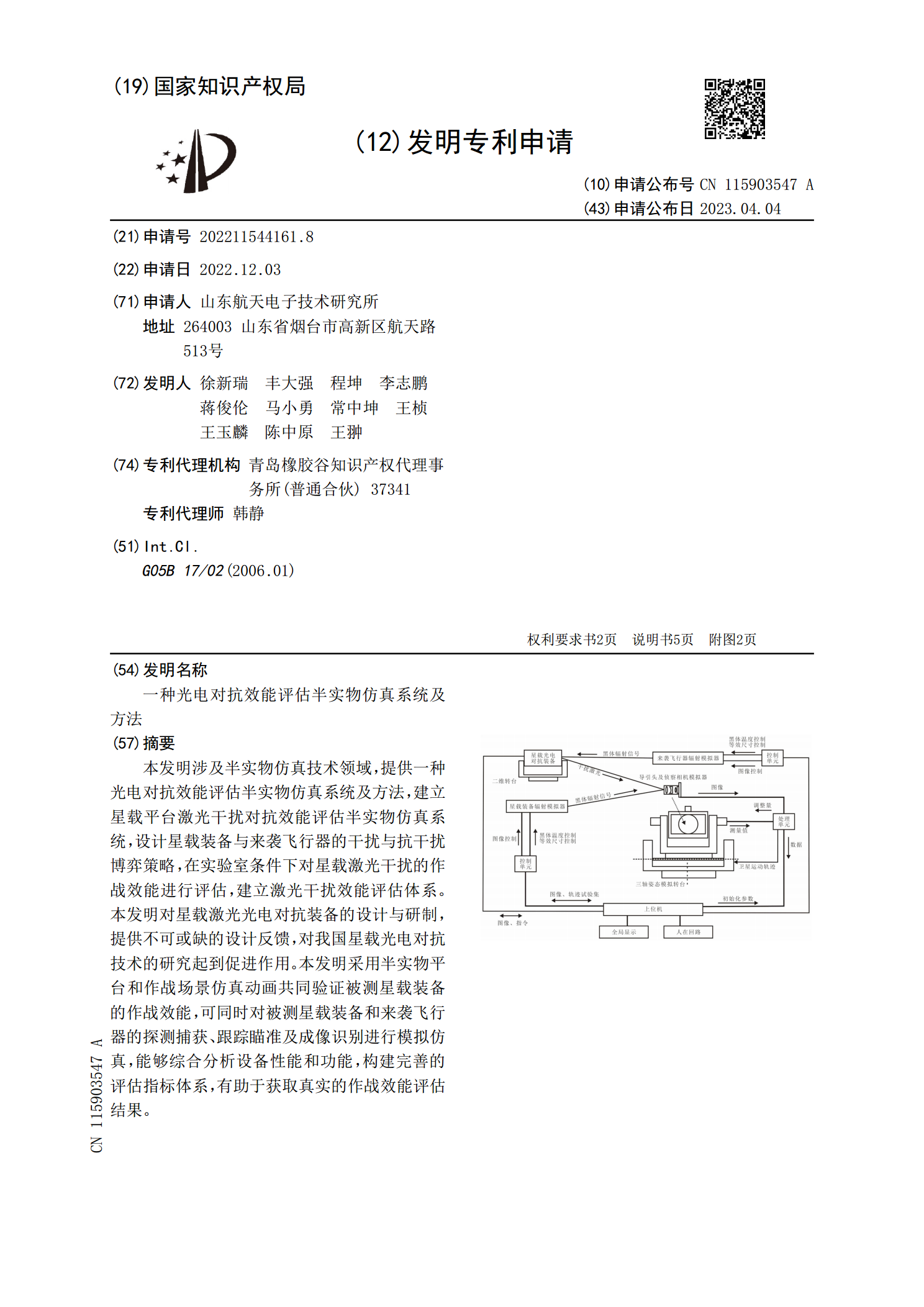
本发明涉及半实物仿真技术领域,提供一种光电对抗效能评估半实物仿真系统及方法,建立星载平台激光干扰对抗效能评估半实物仿真系统,设计星载装备与来袭飞行器的干扰与抗干扰博弈策略,在实验室条件下对星载激光干扰的作战效能进行评估,建立激光干扰效能评估体系。本发明对星载激光光电对抗装备的设计与研制,提供不可或缺的设计反馈,对我国星载光电对抗技术的研究起到促进作用。本发明采用半实物平台和作战场景仿真动画共同验证被测星载装备的作战效能,可同时对被测星载装备和来袭飞行器的探测捕获、跟踪瞄准及成像识别进行模拟仿真,能够综合分