
一种滚珠螺母螺旋内滚道曲面及外径的测量方法.pdf

小代****回来


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种滚珠螺母螺旋内滚道曲面及外径的测量方法.pdf
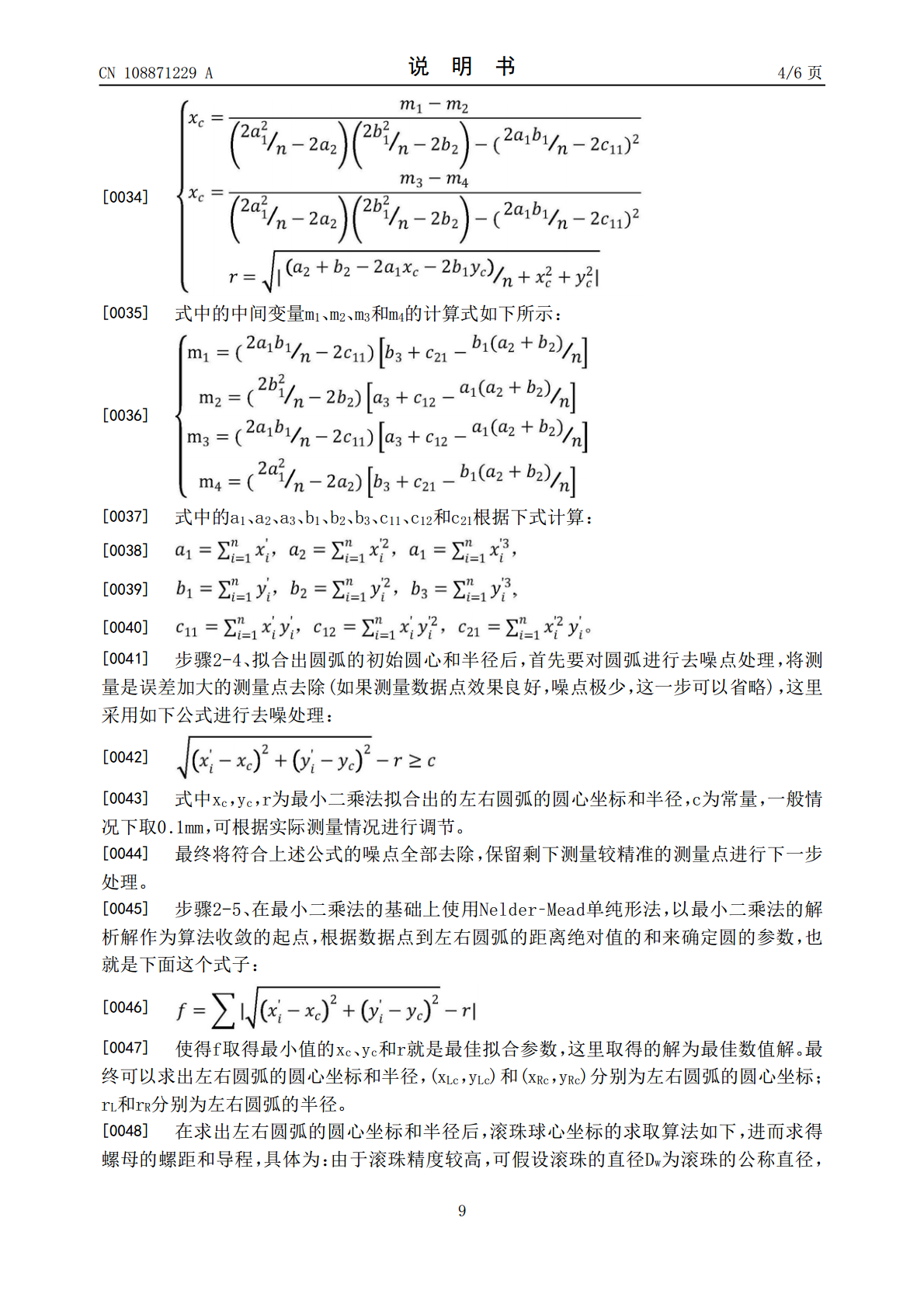
本发明公开了一种滚珠螺母螺旋内滚道曲面及外径的测量方法,利用激光三角位移传感器进行测量,将激光位移传感器置于螺母法兰盘外部;通过带三棱镜的测量头伸入螺母内部,同时将水平光线转变为垂直光线,扫描出螺母内滚道的轴向截面轮廓,通过空间转换将轴向截面轮廓转换为法向截面轮廓,得到左右圆弧,完成噪点处理后,通过基于最小二乘的单纯形算法进行圆弧的拟合,进行螺母外径测量是,使用两个对称放置且垂直螺母轴线的激光位移传感器,同时使用两个标准量棒作为基准,获得螺母的外径。通过数学分析,螺母内滚道的法向截形(左右圆弧半径及圆心)

基于激光的滚珠螺母内滚道检测方法研究.docx
基于激光的滚珠螺母内滚道检测方法研究标题:基于激光的滚珠螺母内滚道检测方法研究摘要:滚珠螺母是一种广泛应用于机械传动系统中的关键部件,其性能直接影响到整个传动系统的稳定性和可靠性。内滚道作为滚珠螺母的重要部分,其精度对滚珠螺母的工作性能起着至关重要的作用。为了确保滚珠螺母内滚道的质量,本文基于激光技术,提出了一种新的内滚道检测方法。引言:滚珠螺母是一种常见的精密传动装置,广泛应用于航空航天、汽车、机械制造等领域。内滚道是滚珠螺母的核心部分,其精度直接关系到传动系统的性能。传统的内滚道检测方法存在检测时间长

一种丝杆螺母的内螺旋滚道的加工方法.pdf
本发明涉及汽车刹车系统用丝杆螺母的内螺旋滚道的加工方法,包括以下步骤:根据内螺旋滚道的几何尺寸和形貌修整砂轮轮廓和调整进刀的轨迹,对工件进行磨削,得到具有内螺旋滚道几何形貌的丝杆螺母;再对制得的丝杆螺母进行清洗,以去除残留的磨屑和抛光液;最后采用具有振动机构和磨料流进出通道的装置连接清洗干净的丝杆螺母,使磨料流流经螺旋滚道,磨料流流经螺旋滚道的同时振动机构对装置施加振动。本方法不仅避免了只采用磨削的加工工艺易造成对表面烧伤的问题,还将丝杆螺母内的螺旋滚道的加工分为两个相对独立的步骤,彼此衔接配合,加工效率
一种大导程多滚道滚珠螺母圆弧螺旋槽的加工工具及工艺.pdf
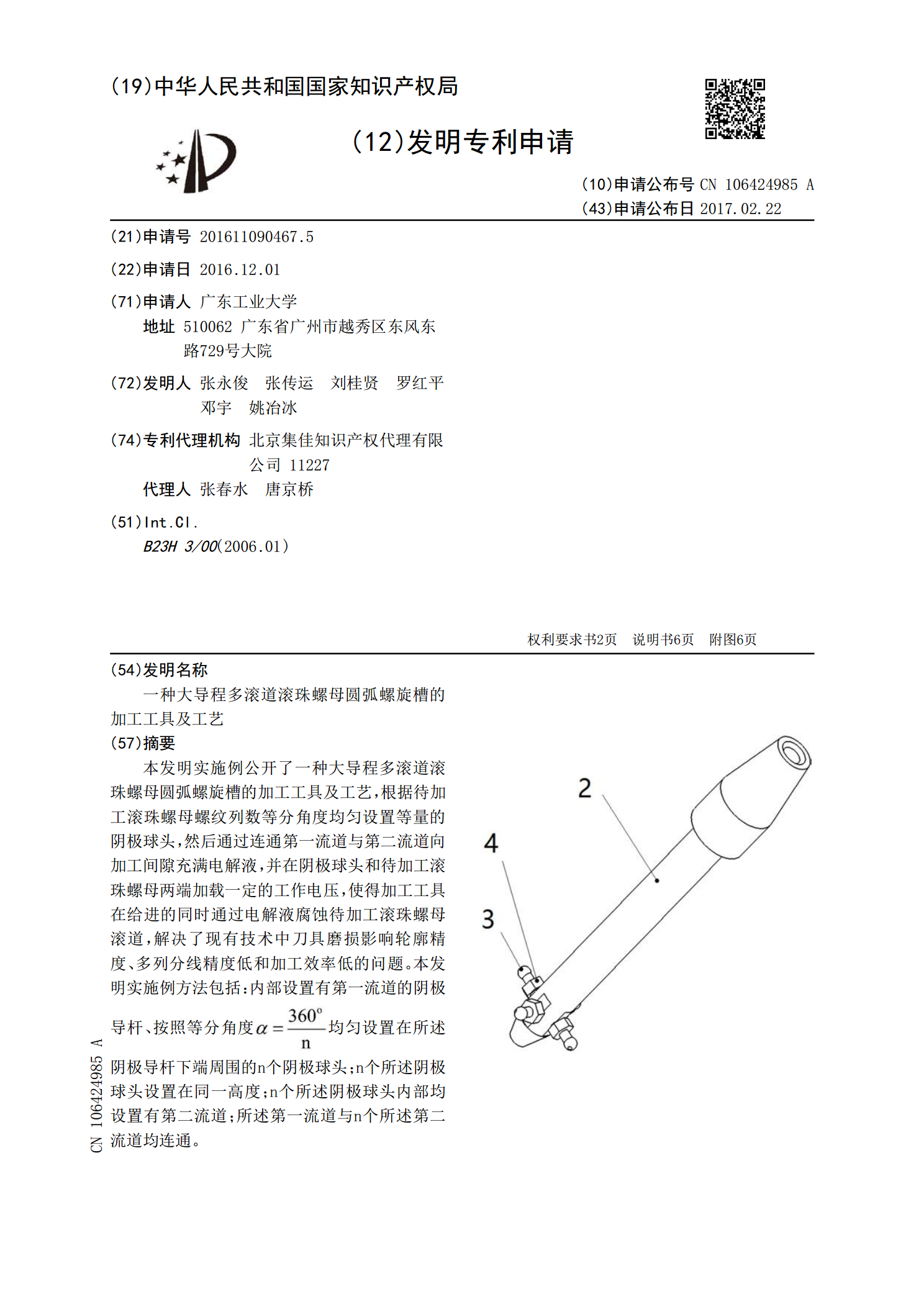
本发明实施例公开了一种大导程多滚道滚珠螺母圆弧螺旋槽的加工工具及工艺,根据待加工滚珠螺母螺纹列数等分角度均匀设置等量的阴极球头,然后通过连通第一流道与第二流道向加工间隙充满电解液,并在阴极球头和待加工滚珠螺母两端加载一定的工作电压,使得加工工具在给进的同时通过电解液腐蚀待加工滚珠螺母滚道,解决了现有技术中刀具磨损影响轮廓精度、多列分线精度低和加工效率低的问题。本发明实施例方法包括:内部设置有第一流道的阴极导杆、按照等分角度均匀设置在所述阴极导杆下端周围的n个阴极球头;n个所述阴极球头设置在同一高度;n个所
一种新型滚珠丝杠螺母内滚道型面检测装置及其方法.pdf
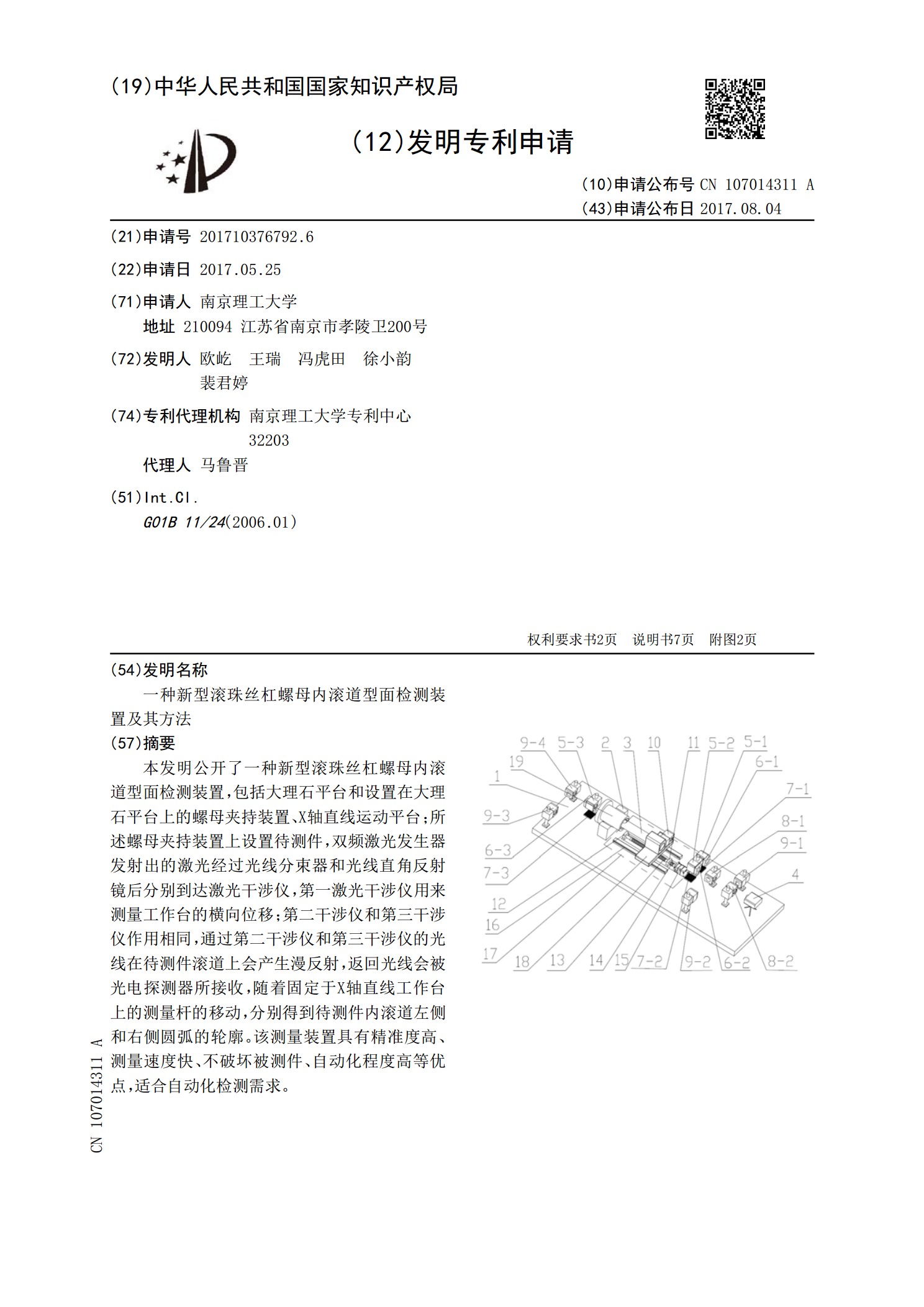
本发明公开了一种新型滚珠丝杠螺母内滚道型面检测装置,包括大理石平台和设置在大理石平台上的螺母夹持装置、X轴直线运动平台;所述螺母夹持装置上设置待测件,双频激光发生器发射出的激光经过光线分束器和光线直角反射镜后分别到达激光干涉仪,第一激光干涉仪用来测量工作台的横向位移;第二干涉仪和第三干涉仪作用相同,通过第二干涉仪和第三干涉仪的光线在待测件滚道上会产生漫反射,返回光线会被光电探测器所接收,随着固定于X轴直线工作台上的测量杆的移动,分别得到待测件内滚道左侧和右侧圆弧的轮廓。该测量装置具有精准度高、测量速度快、