
一种列车车轮几何参数在线动态测量装置及测量方法.pdf

是你****芹呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种列车车轮几何参数在线动态测量装置及测量方法.pdf
本发明公开了一种列车车轮几何参数在线动态测量装置及测量方法,属于列车车轮检测技术领域。本发明的一种列车车轮几何参数在线动态测量装置,包括沿列车行驶方向依次安装于轨道内侧的测速传感器、启动开关、第一激光位移传感器、第二激光位移传感器和停止开关,第一激光位移传感器与第二激光位移传感器的探测光束所在平面平行,且均垂直于车轮内辋面和轨道顶面。采用第一激光位移传感器和第二激光位移传感器同时对列车车轮进行数据采集,对采集得到的数据进行处理即可以获得列车车轮的车轮踏面直径、车轮轮缘高、轮缘厚和轮缘综合值等几何参数,其测

一种列车车轮几何参数在线动态测量装置及测量方法.pdf
本发明公开了一种列车车轮几何参数在线动态测量装置及测量方法,属于列车车轮参数检测技术领域。本发明的在线动态测量装置,包括沿列车行驶方向依次设置于轨道内侧的测速传感器、车轮定位传感器、激光位移传感器I和停止开关以及设置于轨道外侧的激光位移传感器II,当车轮定位传感器被车轮触发时,两个激光位移传感器同时进行采集,当停止开关被车轮触发时,两个激光位移传感器同时停止采集,将采集到的数据传送至数据处理系统进行处理,即得列车车轮的几何参数。采用本发明的技术方案可以对列车车轮的几何参数进行在线动态测量,且其测量精度较高
一种列车车轮几何参数在线动态测量装置及测量方法.pdf
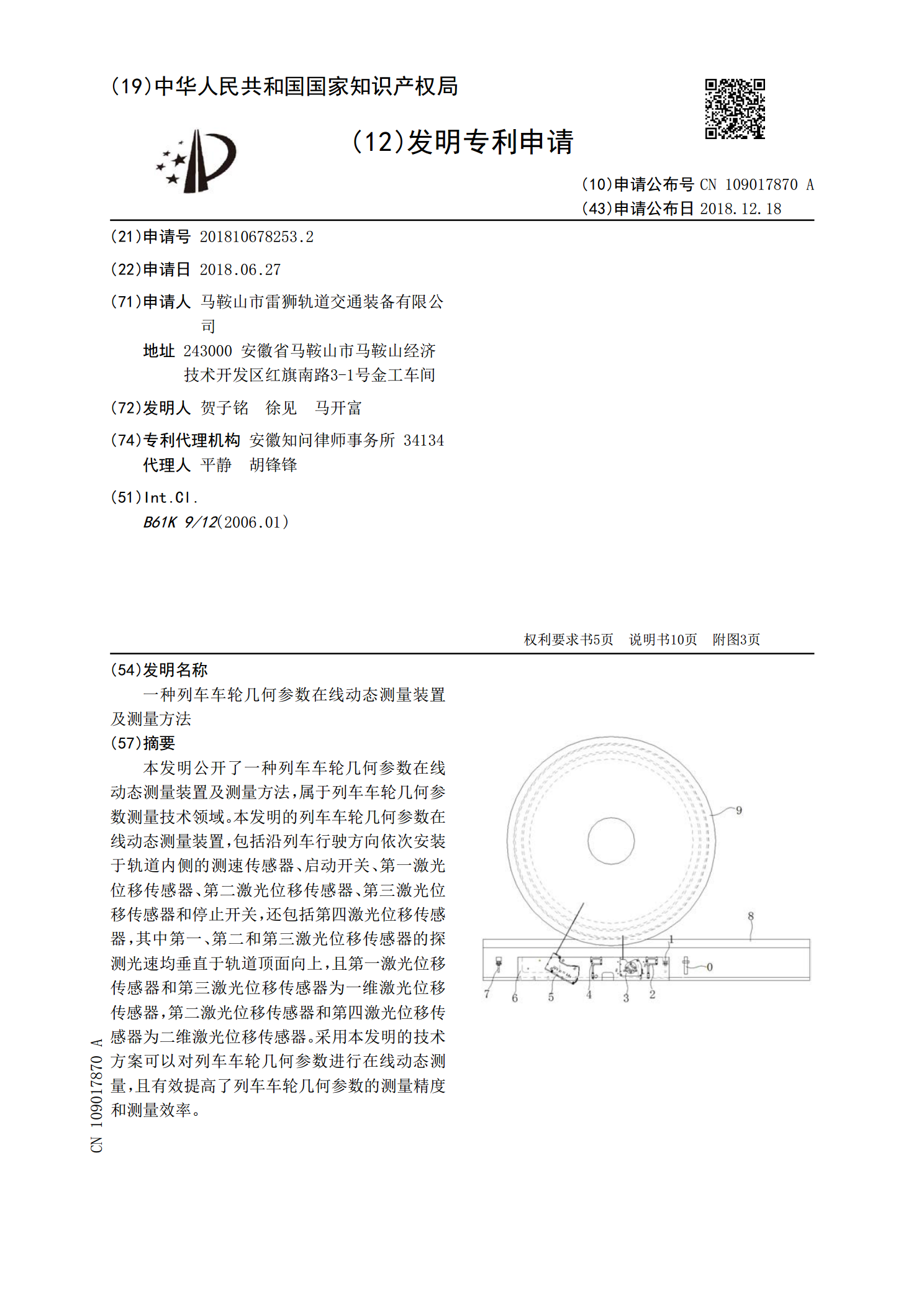
本发明公开了一种列车车轮几何参数在线动态测量装置及测量方法,属于列车车轮几何参数测量技术领域。本发明的列车车轮几何参数在线动态测量装置,包括沿列车行驶方向依次安装于轨道内侧的测速传感器、启动开关、第一激光位移传感器、第二激光位移传感器、第三激光位移传感器和停止开关,还包括第四激光位移传感器,其中第一、第二和第三激光位移传感器的探测光速均垂直于轨道顶面向上,且第一激光位移传感器和第三激光位移传感器为一维激光位移传感器,第二激光位移传感器和第四激光位移传感器为二维激光位移传感器。采用本发明的技术方案可以对列车

一种列车车轮几何参数在线动态测量装置及测量方法.pdf
本发明公开了一种列车车轮几何参数在线动态测量装置及测量方法,属于列车车轮检测技术领域。本发明的一种列车车轮几何参数在线动态测量装置,包括沿列车行驶方向依次设置于轨道内侧的启动开关、激光位移传感器I、激光位移传感器II和停止开关,以及设置于轨道内侧或外侧的激光位移传感器III,其中激光位移传感器I的探测光束垂直于轨道顶面向上并垂直于车轮内辋面,激光位移传感器II的探测光束垂直于轨道顶面向上并平行于车轮内辋面,激光位移传感器III的探测光束与轨道顶面之间存在倾斜夹角。采用本发明的技术方案可以对列车车轮几何参数

一种列车车轮几何参数在线动态测量装置及测量方法.pdf
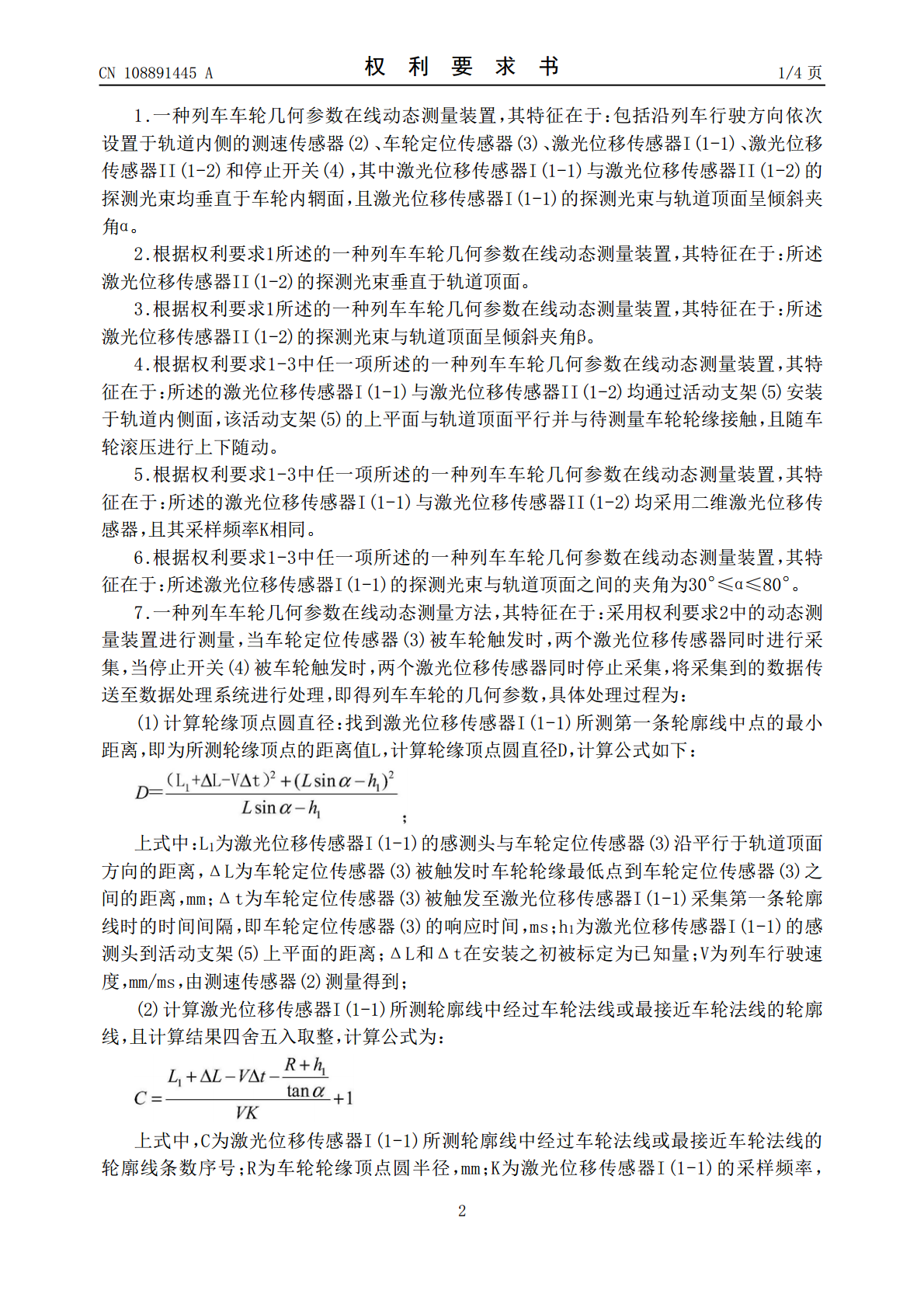
本发明公开了一种列车车轮几何参数在线动态测量装置及测量方法,属于列车车轮参数检测技术领域。本发明的列车车轮几何参数在线动态测量装置,包括沿列车行驶方向依次设置于轨道内侧的测速传感器、车轮定位传感器、激光位移传感器I、激光位移传感器II和停止开关,其中激光位移传感器I与激光位移传感器II的探测光束均垂直于车轮内辋面,且激光位移传感器I的探测光束与轨道顶面呈倾斜夹角α;当车轮定位传感器被车轮触发时,两个激光位移传感器同时进行采集,当停止开关被车轮触发时,两个激光位移传感器同时停止采集,将采集到的数据进行处理,