
喷胶路径的定位方法和喷胶方法.pdf

书生****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
喷胶路径的定位方法和喷胶方法.pdf
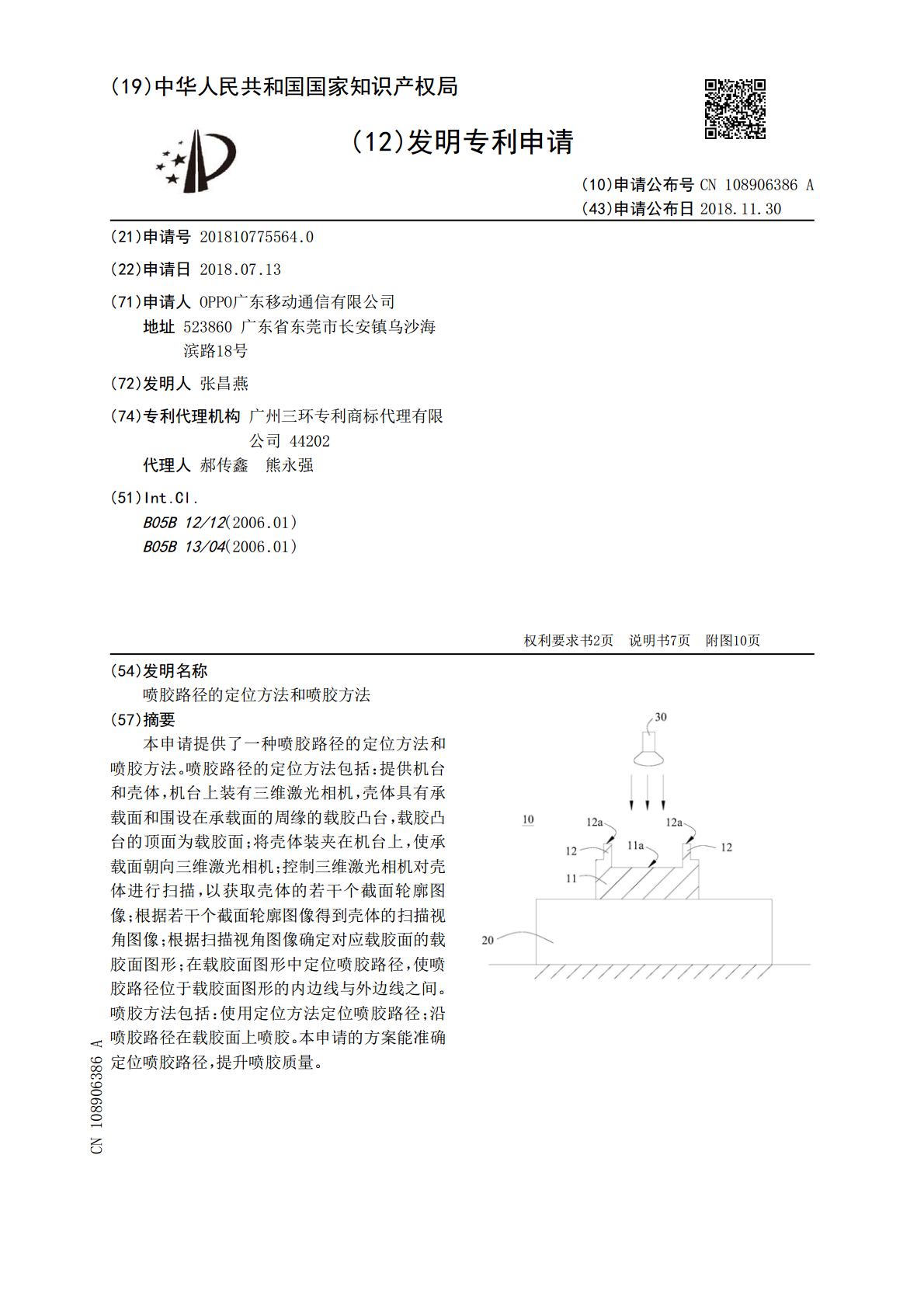
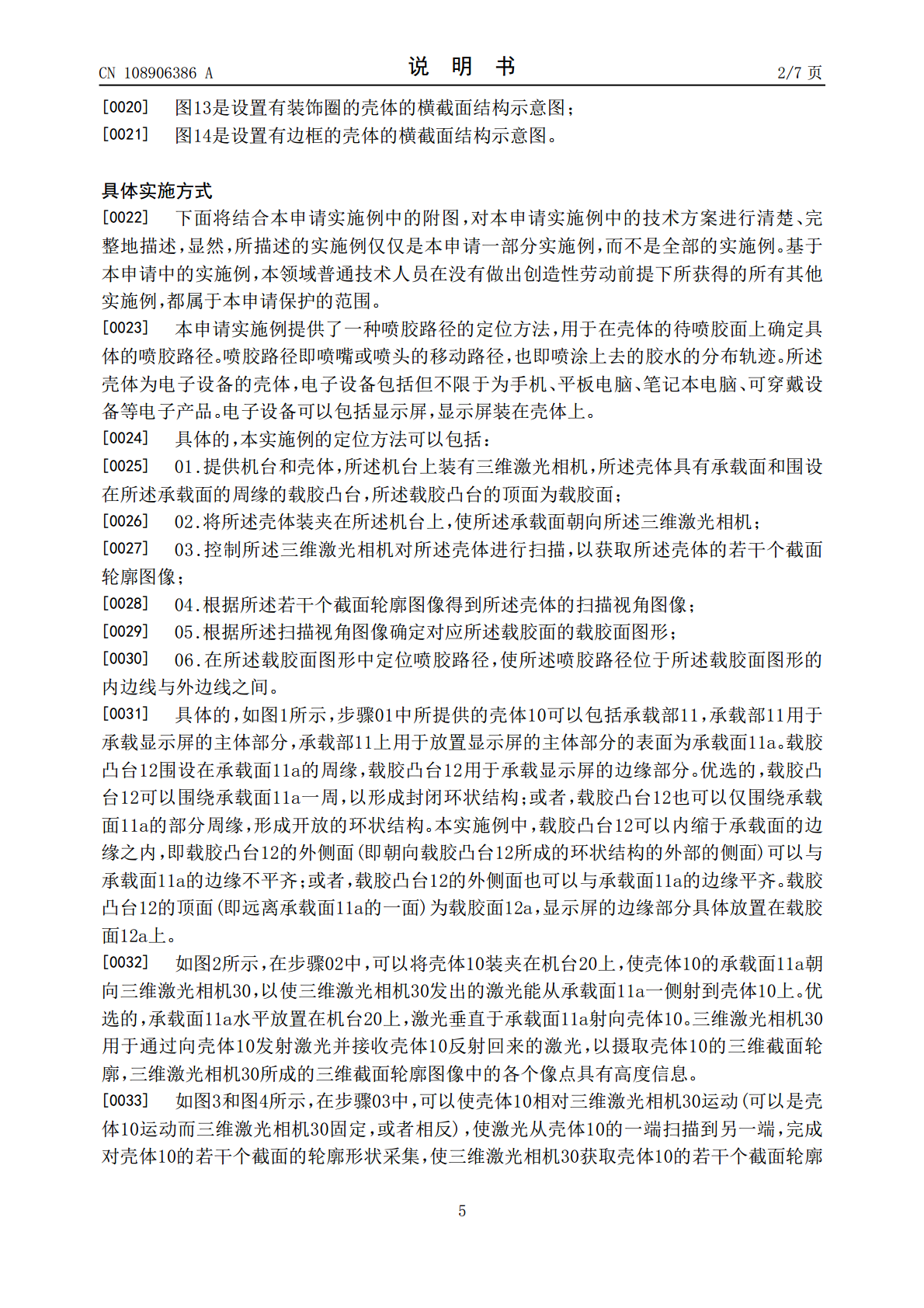
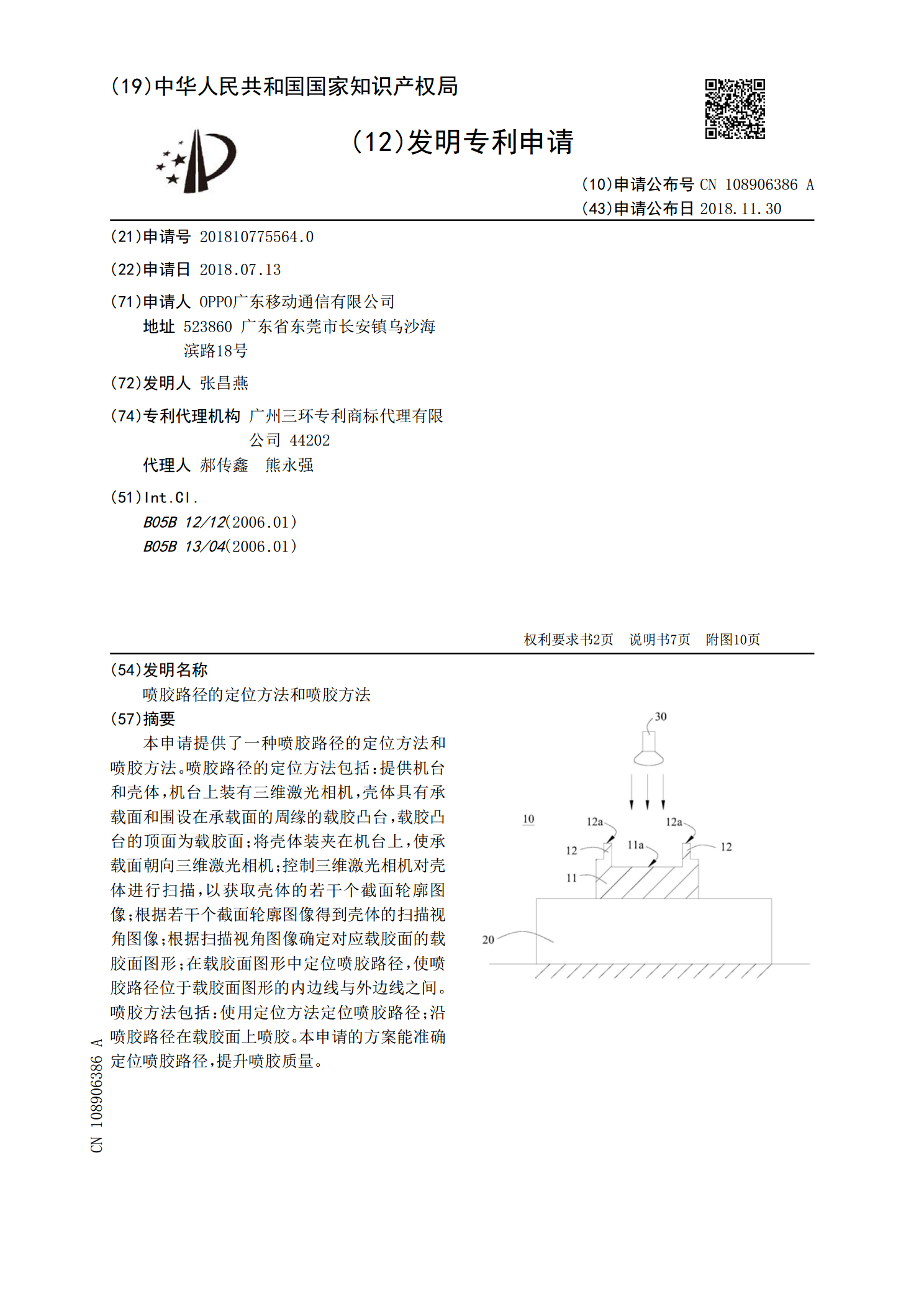
本申请提供了一种喷胶路径的定位方法和喷胶方法。喷胶路径的定位方法包括:提供机台和壳体,机台上装有三维激光相机,壳体具有承载面和围设在承载面的周缘的载胶凸台,载胶凸台的顶面为载胶面;将壳体装夹在机台上,使承载面朝向三维激光相机;控制三维激光相机对壳体进行扫描,以获取壳体的若干个截面轮廓图像;根据若干个截面轮廓图像得到壳体的扫描视角图像;根据扫描视角图像确定对应载胶面的载胶面图形;在载胶面图形中定位喷胶路径,使喷胶路径位于载胶面图形的内边线与外边线之间。喷胶方法包括:使用定位方法定位喷胶路径;沿喷胶路径在载胶

轮胎自动定位喷胶方法和轮胎自动定位喷胶设备.pdf
本发明提供一类轮胎自动定位喷胶方法,包括:将轮胎放置到双辊筒上,由双辊筒带动轮胎旋转,利用轮胎旋转加上固定挡胎杆及可调节挡胎杆的作用,达到轮胎的动态固定,根据设定好的喷胶量,喷枪将喷胶材料喷涂到轮胎内侧;本发明还提供一类轮胎自动定装位喷胶设备,包括:机体、控制装置、喷胶装置、自动定位装置、动力装置、传动装置。

喷胶装置及喷胶方法.pdf
本发明公开了一种喷胶装置,包括凸轮,凸轮连接滑杆开关的左端,滑杆开关的右侧连接压缩弹簧;在凸轮和压缩弹簧的共同作用下,控制滑杆开关的往复直线运动;滑杆开关活动设置于胶缸内;胶缸的上部设置有上通道,胶缸的下部设置有下通道;滑杆开关活动设置于上通道与下通道之间;滑杆开关在往复直线运动的过程中,当其连接孔正对上通道和下通道时,连接孔将上通道与下通道接通,实现喷胶;当滑杆开关运动一段行程,其连接孔错开上通道和下通道,断开上通道与下通道,则停止喷胶。本发明用简单的直线机构代替复杂的旋转机构,由于直线运动的行程非常小
喷胶装置及喷胶方法.pdf
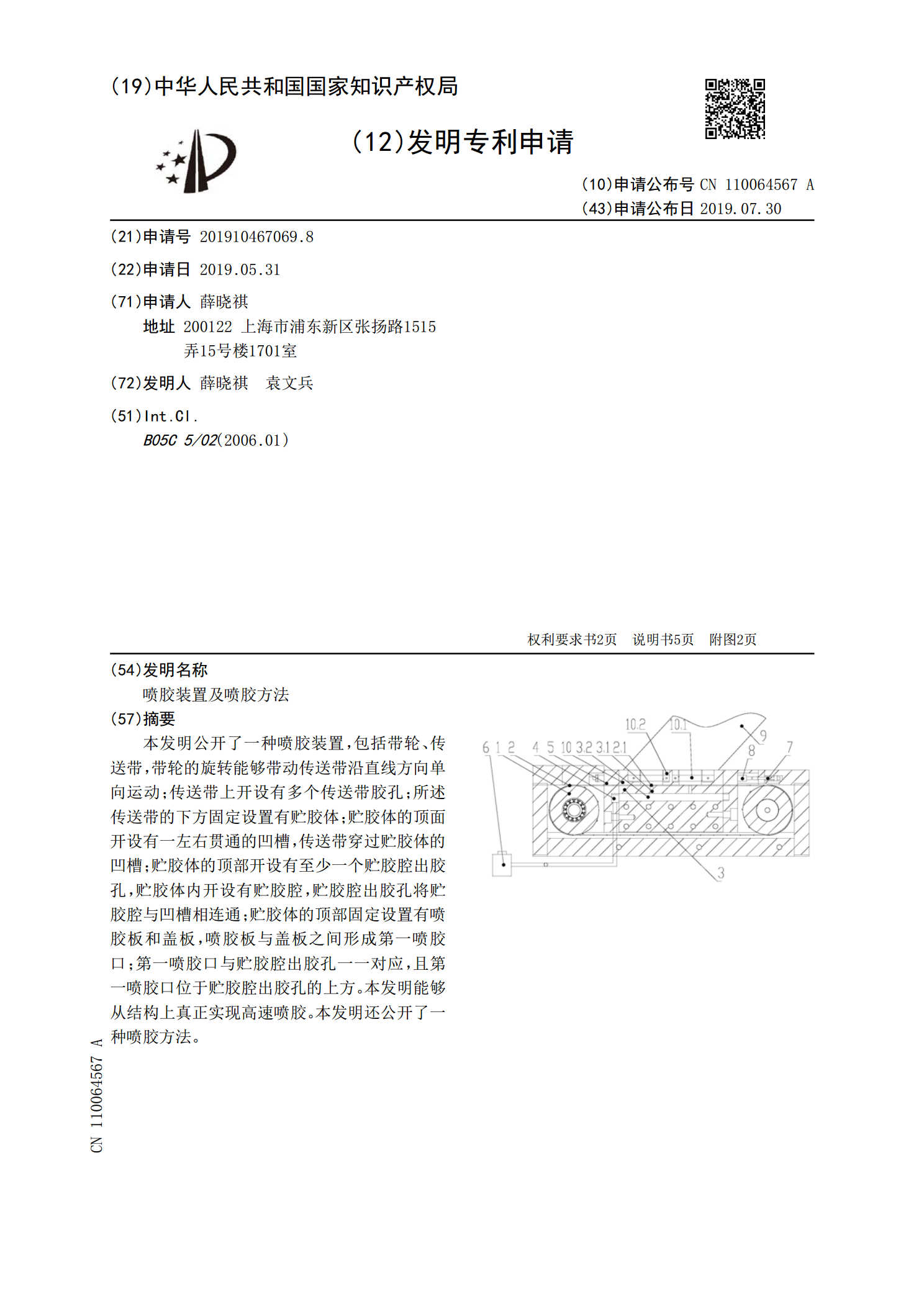
本发明公开了一种喷胶装置,包括带轮、传送带,带轮的旋转能够带动传送带沿直线方向单向运动;传送带上开设有多个传送带胶孔;所述传送带的下方固定设置有贮胶体;贮胶体的顶面开设有一左右贯通的凹槽,传送带穿过贮胶体的凹槽;贮胶体的顶部开设有至少一个贮胶腔出胶孔,贮胶体内开设有贮胶腔,贮胶腔出胶孔将贮胶腔与凹槽相连通;贮胶体的顶部固定设置有喷胶板和盖板,喷胶板与盖板之间形成第一喷胶口;第一喷胶口与贮胶腔出胶孔一一对应,且第一喷胶口位于贮胶腔出胶孔的上方。本发明能够从结构上真正实现高速喷胶。本发明还公开了一种喷胶方法。
喷胶头、自动喷胶装置及其喷胶方法.pdf
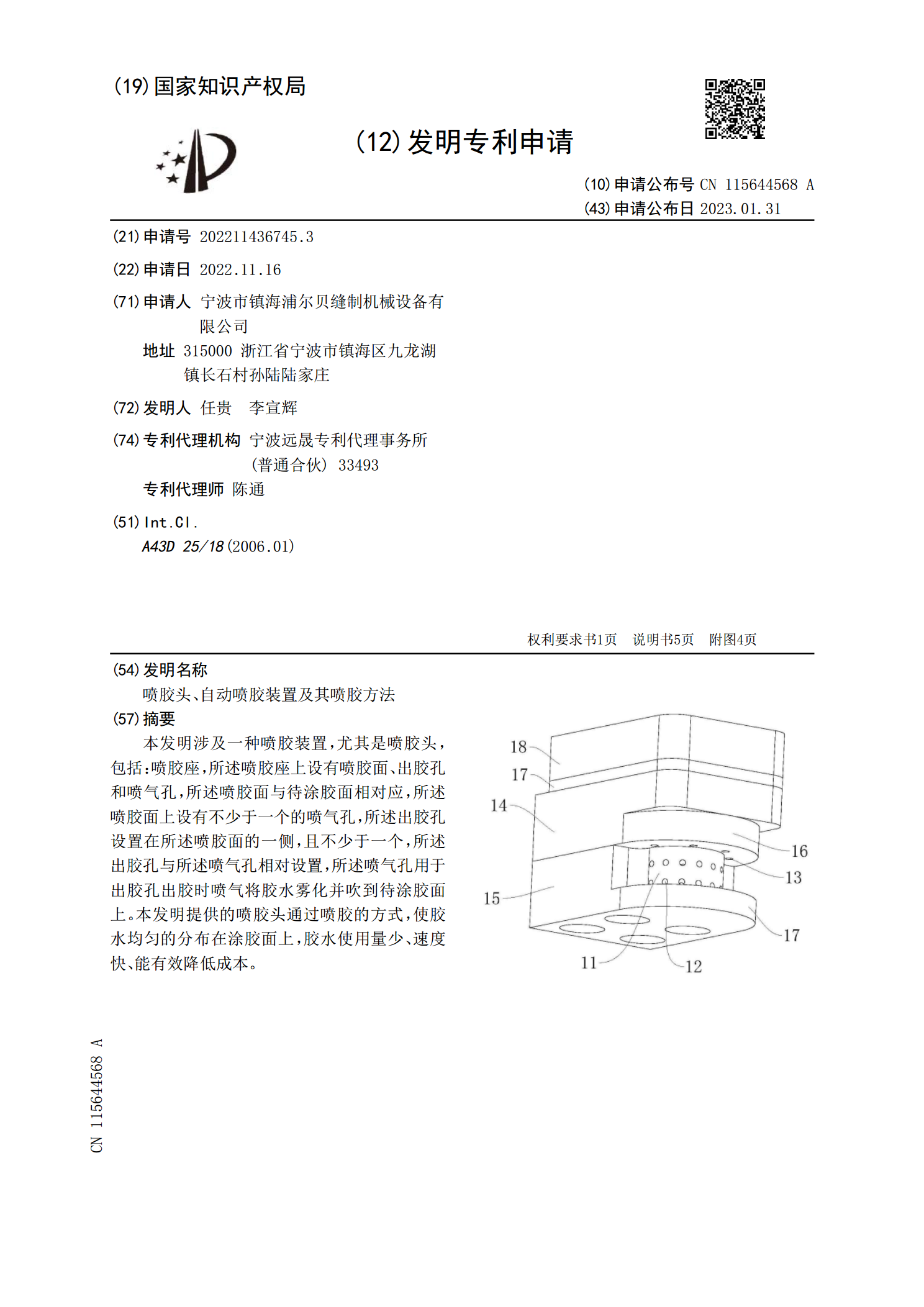
本发明涉及一种喷胶装置,尤其是喷胶头,包括:喷胶座,所述喷胶座上设有喷胶面、出胶孔和喷气孔,所述喷胶面与待涂胶面相对应,所述喷胶面上设有不少于一个的喷气孔,所述出胶孔设置在所述喷胶面的一侧,且不少于一个,所述出胶孔与所述喷气孔相对设置,所述喷气孔用于出胶孔出胶时喷气将胶水雾化并吹到待涂胶面上。本发明提供的喷胶头通过喷胶的方式,使胶水均匀的分布在涂胶面上,胶水使用量少、速度快、能有效降低成本。