
一种具有双支撑工业机器人的手腕结构.pdf

白真****ng


1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有双支撑工业机器人的手腕结构.pdf
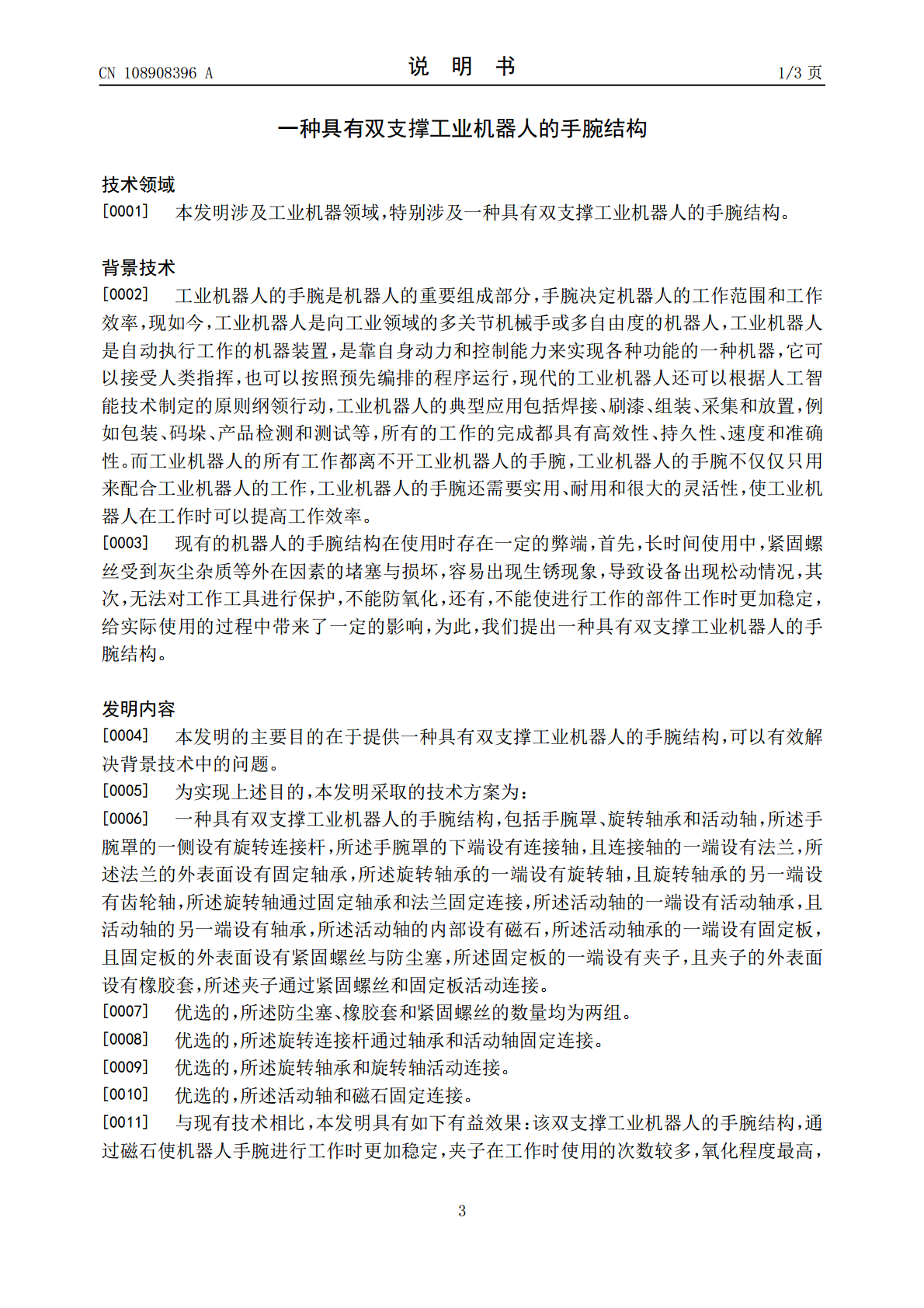
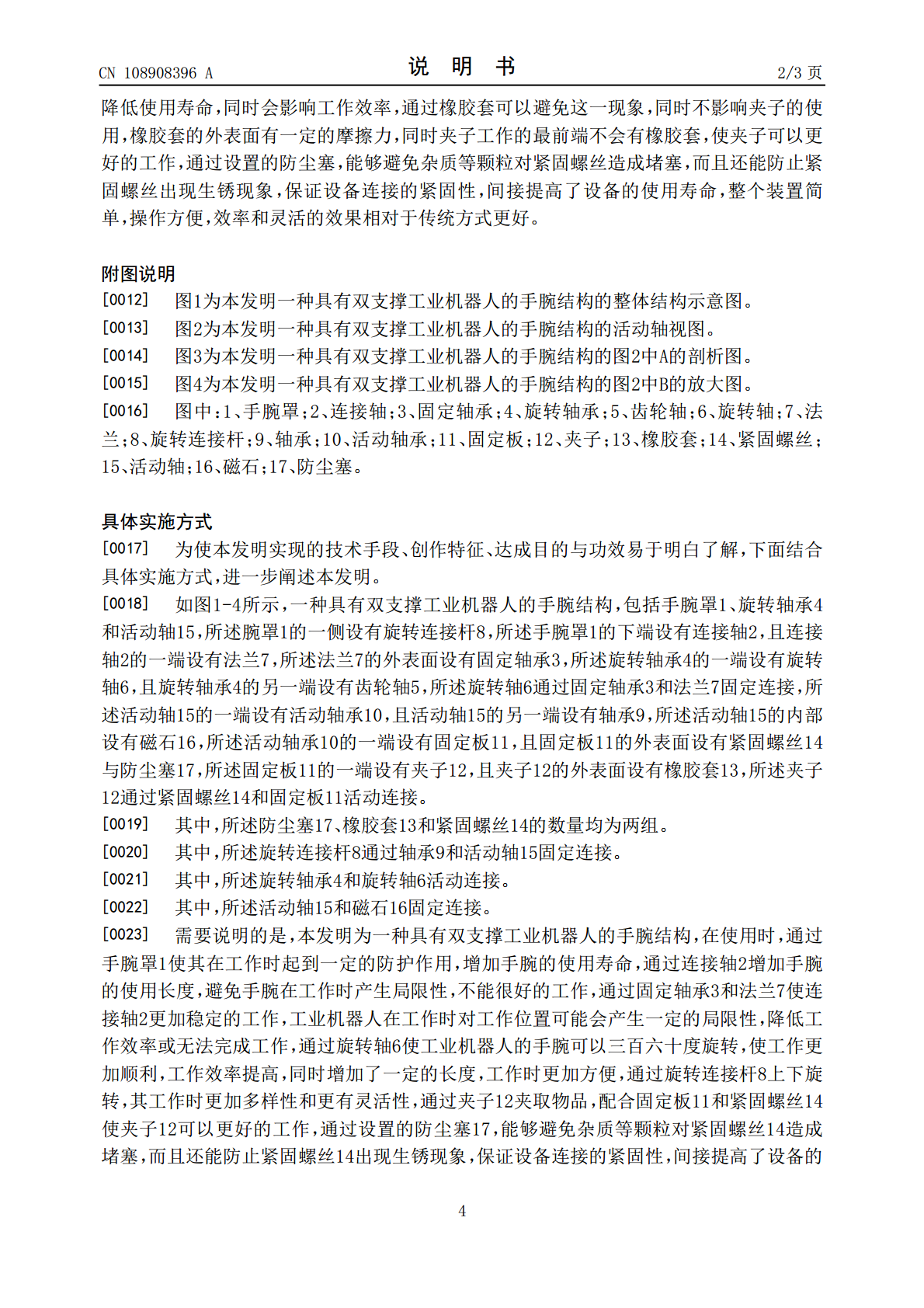
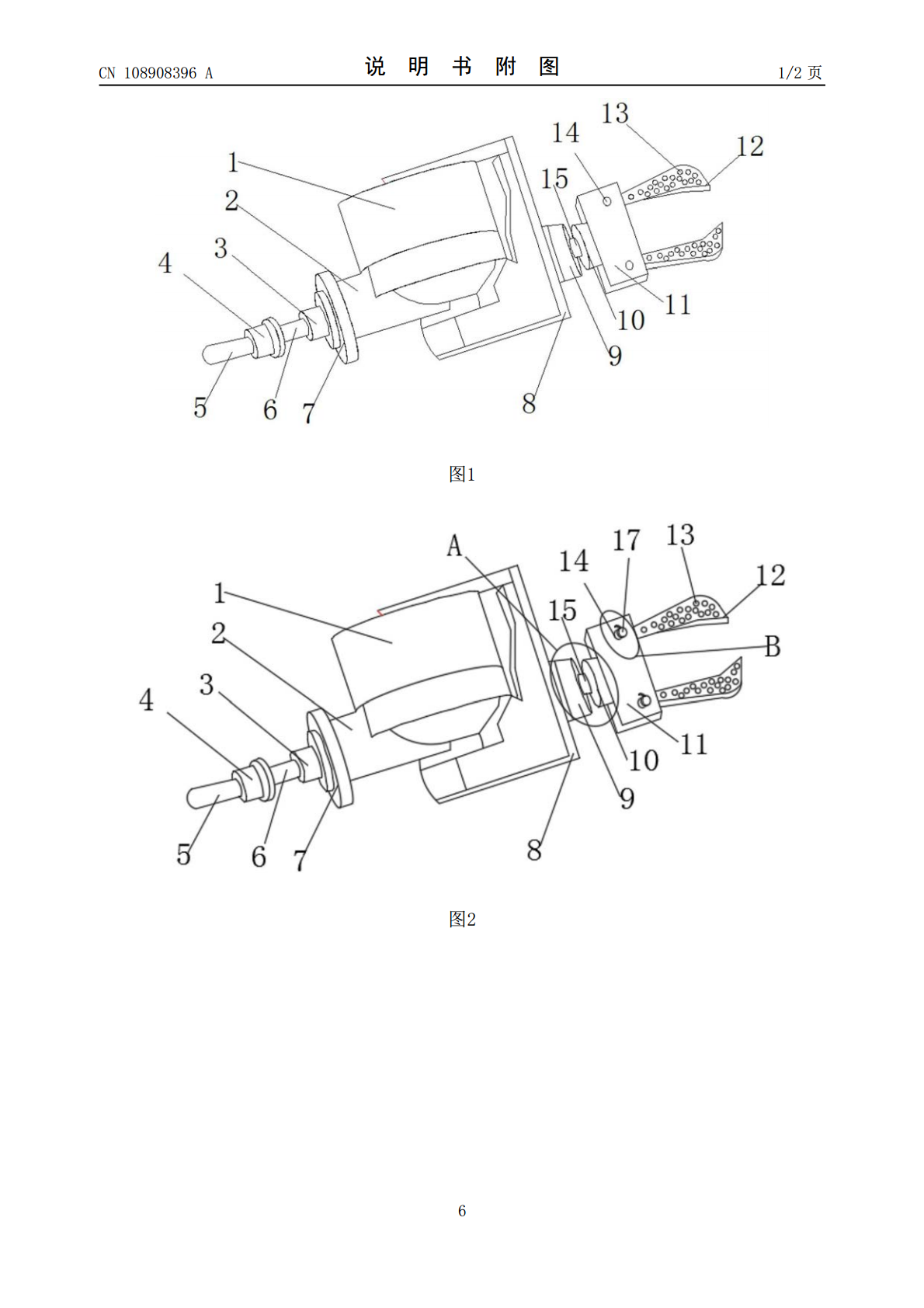
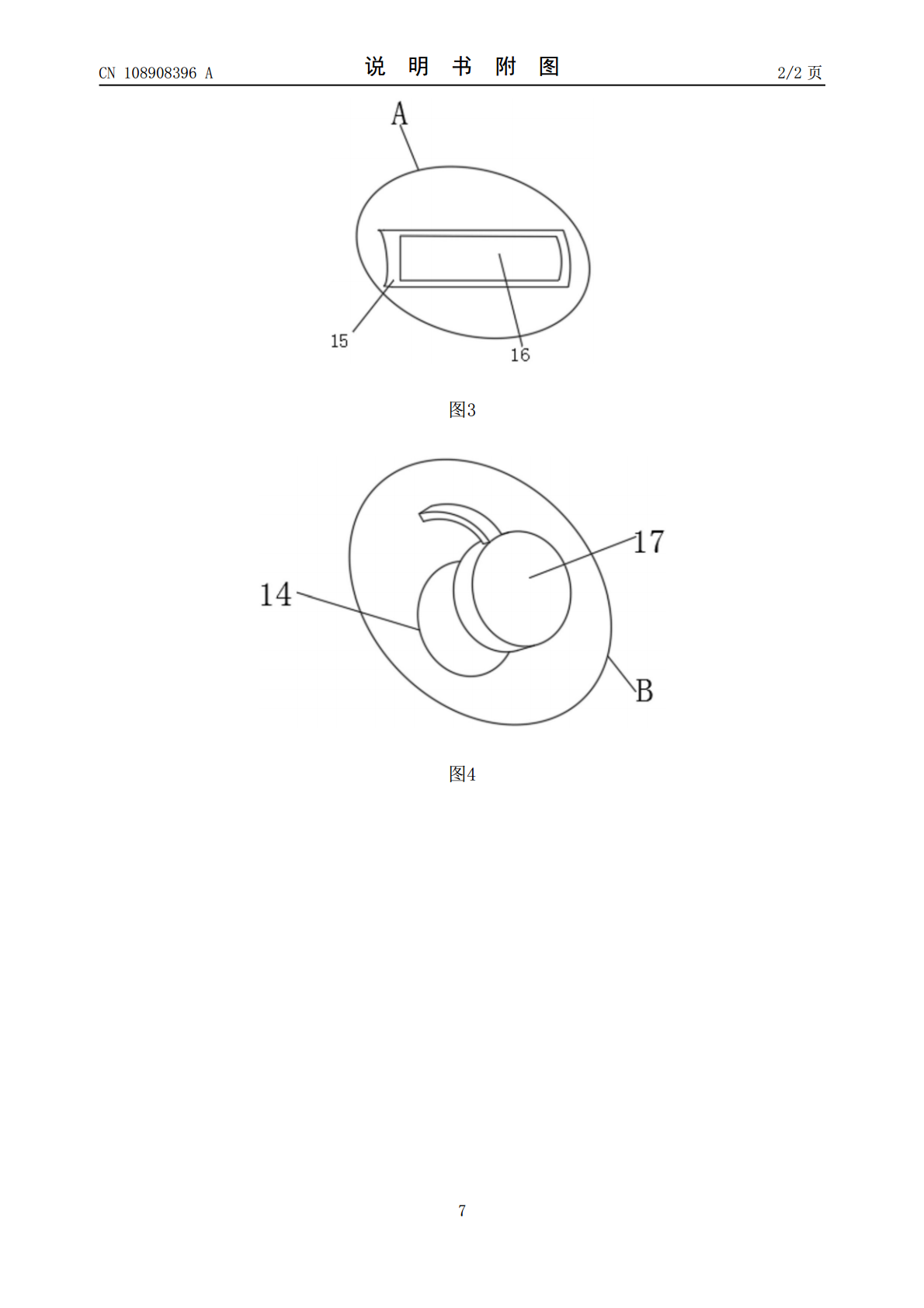
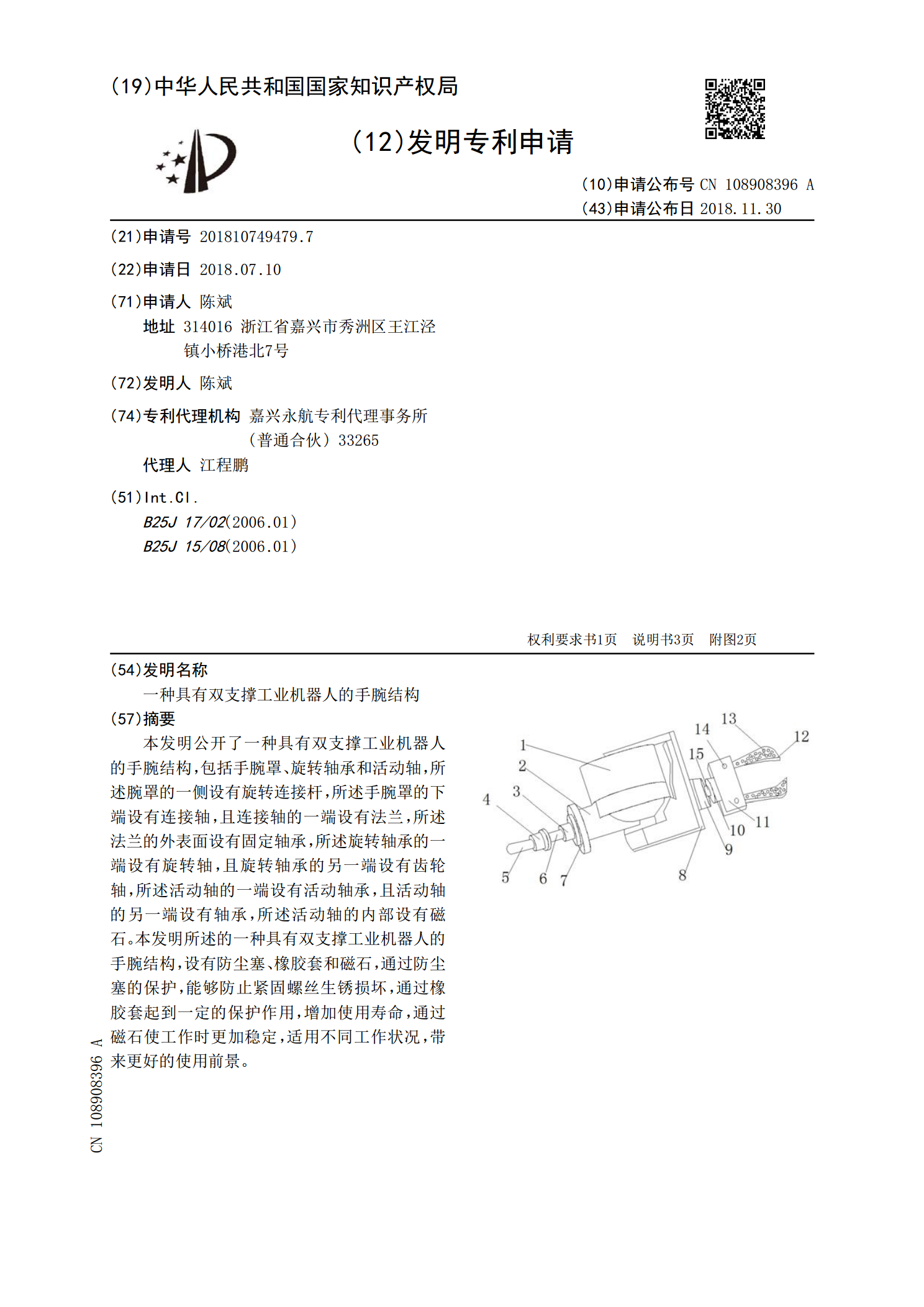
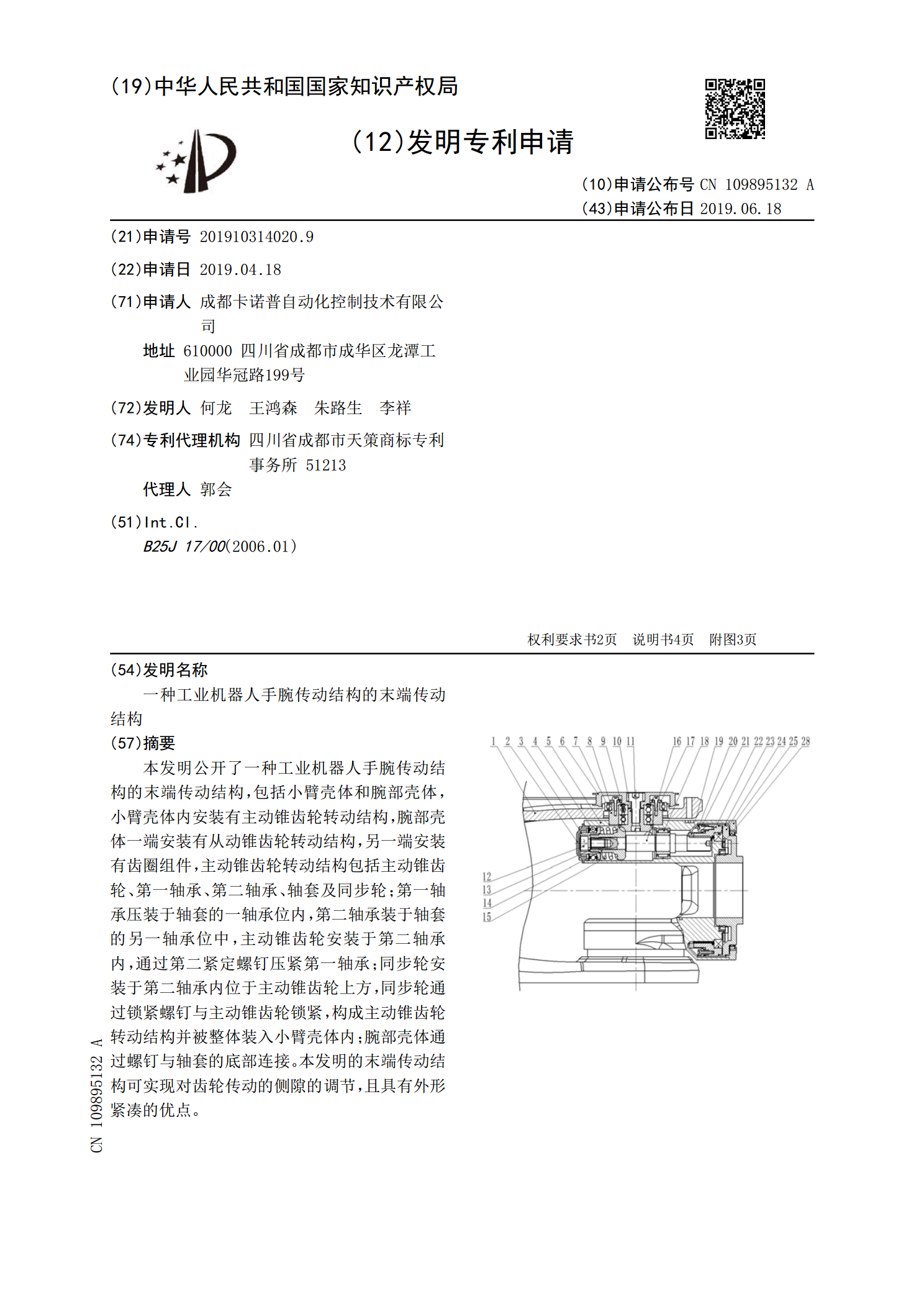
本发明公开了一种具有双支撑工业机器人的手腕结构,包括手腕罩、旋转轴承和活动轴,所述腕罩的一侧设有旋转连接杆,所述手腕罩的下端设有连接轴,且连接轴的一端设有法兰,所述法兰的外表面设有固定轴承,所述旋转轴承的一端设有旋转轴,且旋转轴承的另一端设有齿轮轴,所述活动轴的一端设有活动轴承,且活动轴的另一端设有轴承,所述活动轴的内部设有磁石。本发明所述的一种具有双支撑工业机器人的手腕结构,设有防尘塞、橡胶套和磁石,通过防尘塞的保护,能够防止紧固螺丝生锈损坏,通过橡胶套起到一定的保护作用,增加使用寿命,通过磁石使工作时

一种具有双导柱支撑结构的经编机.pdf
本发明涉及一种具有双导柱支撑结构的经编机,包括针床、针床托座、凸轮连杆机构、针床托座和滑座,针床安装在针床托座上,滑座为双导向孔滑座,针床托座为双导柱针床托座,双导柱针床托座上具有两个导柱,双导向孔滑座上具有两个对导柱的升降运动进行导向的导向孔,凸轮连杆机构与针床托座销接,导柱穿入导向孔。本发明的有益效果是:该经编机工作稳定,其双导柱支撑结构能够承受较大的力、受力均匀、稳定性好、使用寿命长、生产效率高。
一种工业机器人手腕传动结构的末端传动结构.pdf
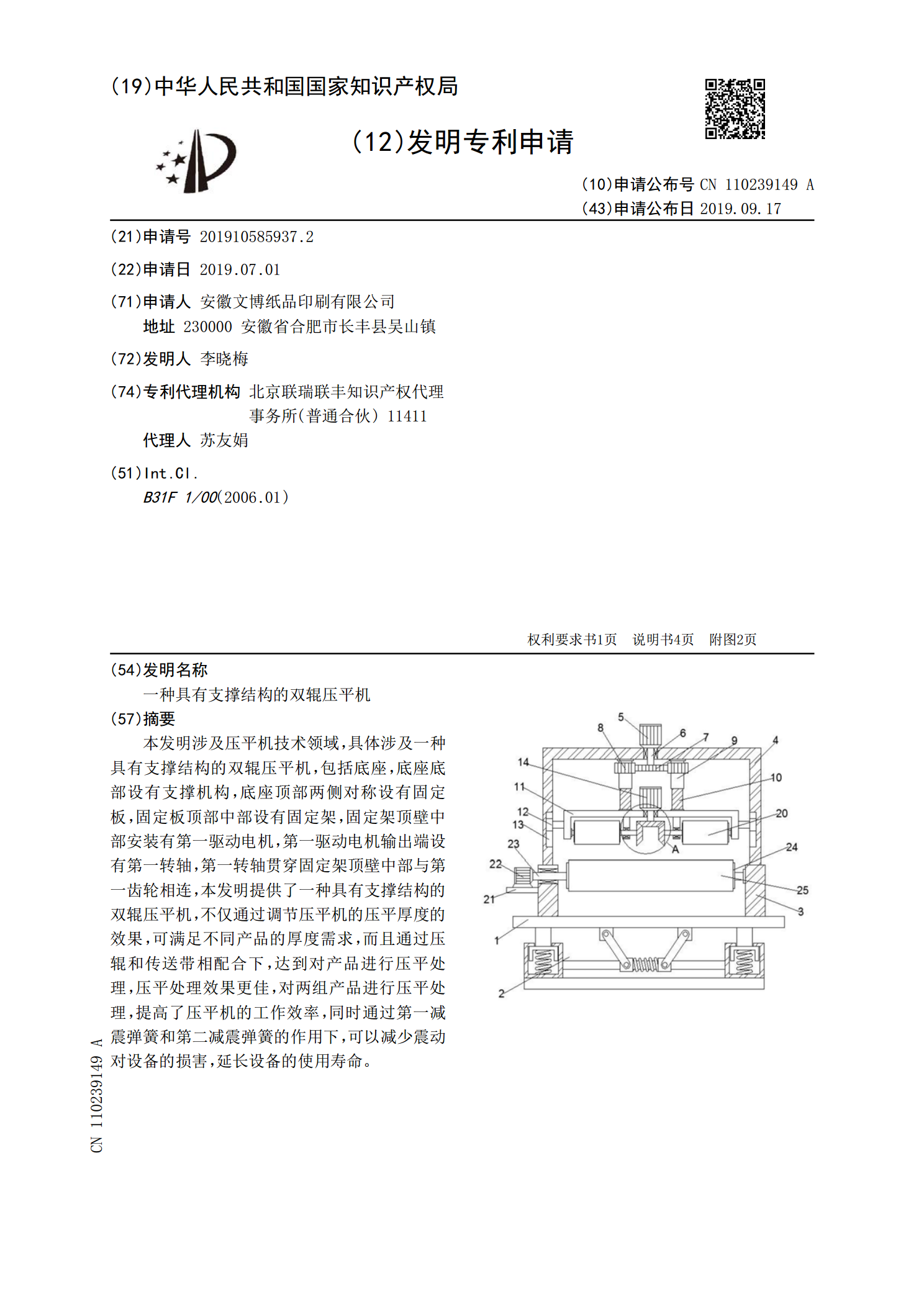
本发明公开了一种工业机器人手腕传动结构的末端传动结构,包括小臂壳体和腕部壳体,小臂壳体内安装有主动锥齿轮转动结构,腕部壳体一端安装有从动锥齿轮转动结构,另一端安装有齿圈组件,主动锥齿轮转动结构包括主动锥齿轮、第一轴承、第二轴承、轴套及同步轮;第一轴承压装于轴套的一轴承位内,第二轴承装于轴套的另一轴承位中,主动锥齿轮安装于第二轴承内,通过第二紧定螺钉压紧第一轴承;同步轮安装于第二轴承内位于主动锥齿轮上方,同步轮通过锁紧螺钉与主动锥齿轮锁紧,构成主动锥齿轮转动结构并被整体装入小臂壳体内;腕部壳体通过螺钉与轴套
一种具有支撑结构的双辊压平机.pdf
本发明涉及压平机技术领域,具体涉及一种具有支撑结构的双辊压平机,包括底座,底座底部设有支撑机构,底座顶部两侧对称设有固定板,固定板顶部中部设有固定架,固定架顶壁中部安装有第一驱动电机,第一驱动电机输出端设有第一转轴,第一转轴贯穿固定架顶壁中部与第一齿轮相连,本发明提供了一种具有支撑结构的双辊压平机,不仅通过调节压平机的压平厚度的效果,可满足不同产品的厚度需求,而且通过压辊和传送带相配合下,达到对产品进行压平处理,压平处理效果更佳,对两组产品进行压平处理,提高了压平机的工作效率,同时通过第一减震弹簧和第二减
一种六轴工业机器人手腕体驱动结构.pdf
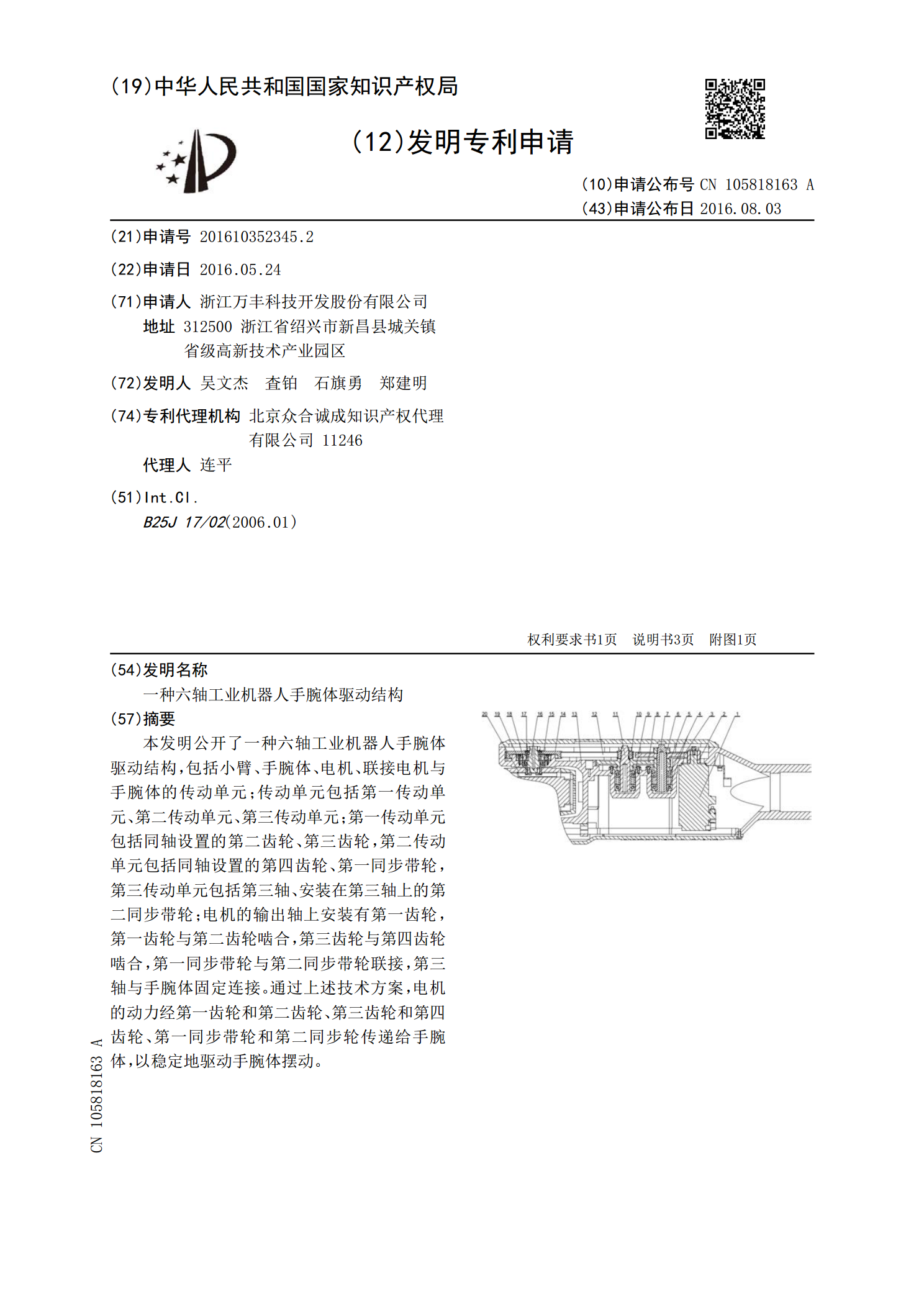
本发明公开了一种六轴工业机器人手腕体驱动结构,包括小臂、手腕体、电机、联接电机与手腕体的传动单元;传动单元包括第一传动单元、第二传动单元、第三传动单元;第一传动单元包括同轴设置的第二齿轮、第三齿轮,第二传动单元包括同轴设置的第四齿轮、第一同步带轮,第三传动单元包括第三轴、安装在第三轴上的第二同步带轮;电机的输出轴上安装有第一齿轮,第一齿轮与第二齿轮啮合,第三齿轮与第四齿轮啮合,第一同步带轮与第二同步带轮联接,第三轴与手腕体固定连接。通过上述技术方案,电机的动力经第一齿轮和第二齿轮、第三齿轮和第四齿轮、第一