
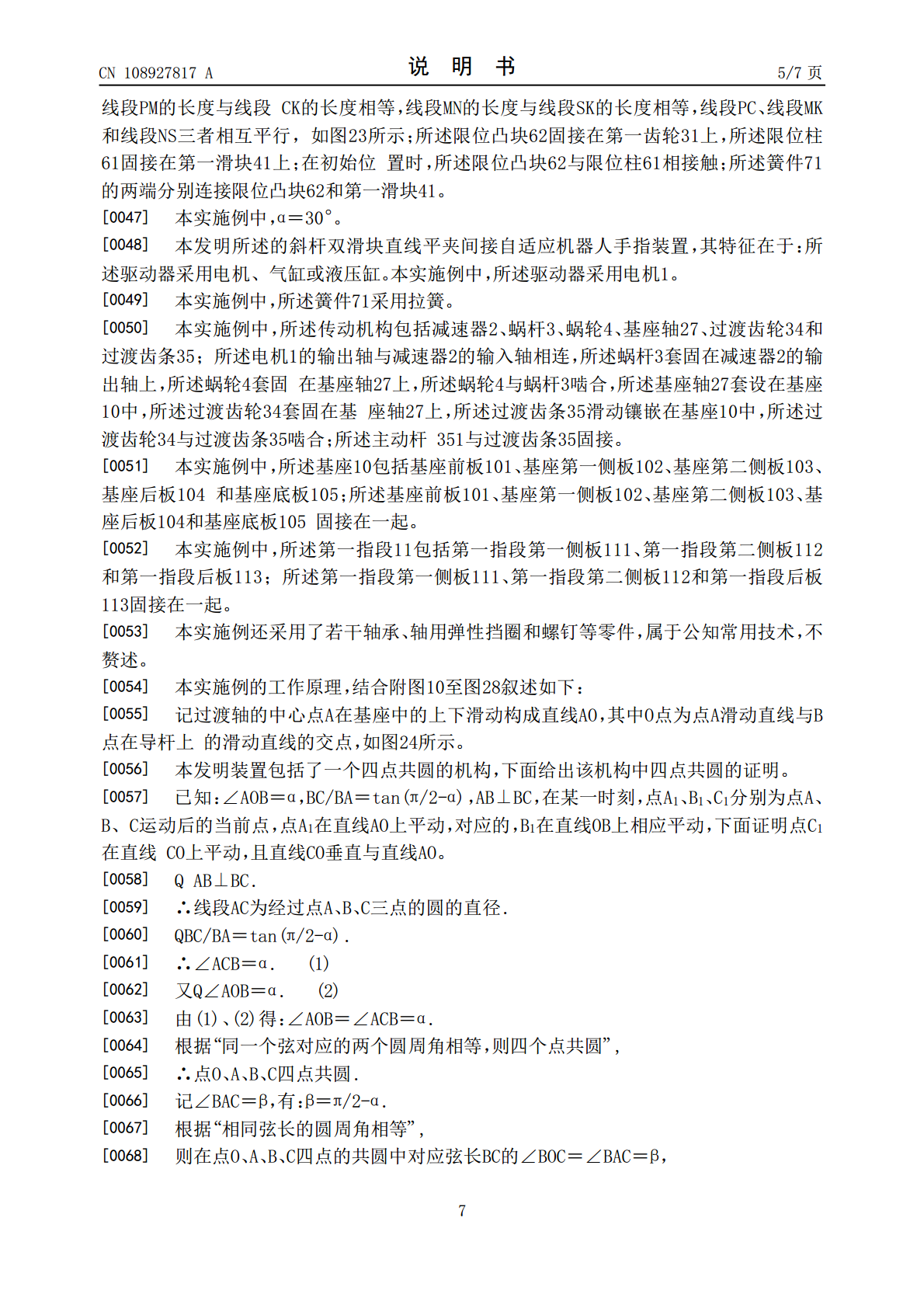
斜杆双滑块直线平夹间接自适应机器人手指装置.pdf

秋花****姐姐

1/10

2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

斜杆双滑块直线平夹间接自适应机器人手指装置.pdf
斜杆双滑块直线平夹间接自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、驱动器、两个连杆、主动杆、从动件、导杆、两个齿轮、传动轮、两个滑块、簧件、限位凸块和限位柱。该装置既能平动第二指段夹持物体,也能在第一指段接触物体之后再转动第二指段包络物体,达到自适应包络不同形状、尺寸物体的目的;在平动第二指段夹持物体的阶段,第二指段末端始终保持直线的轨迹运动,适合在工作台上抓取薄板物体,减少机械臂编程需求;仅用一个驱动器驱动两个关节,结构简单,加工、装配和维护成本低,无需复杂的传感和控制系
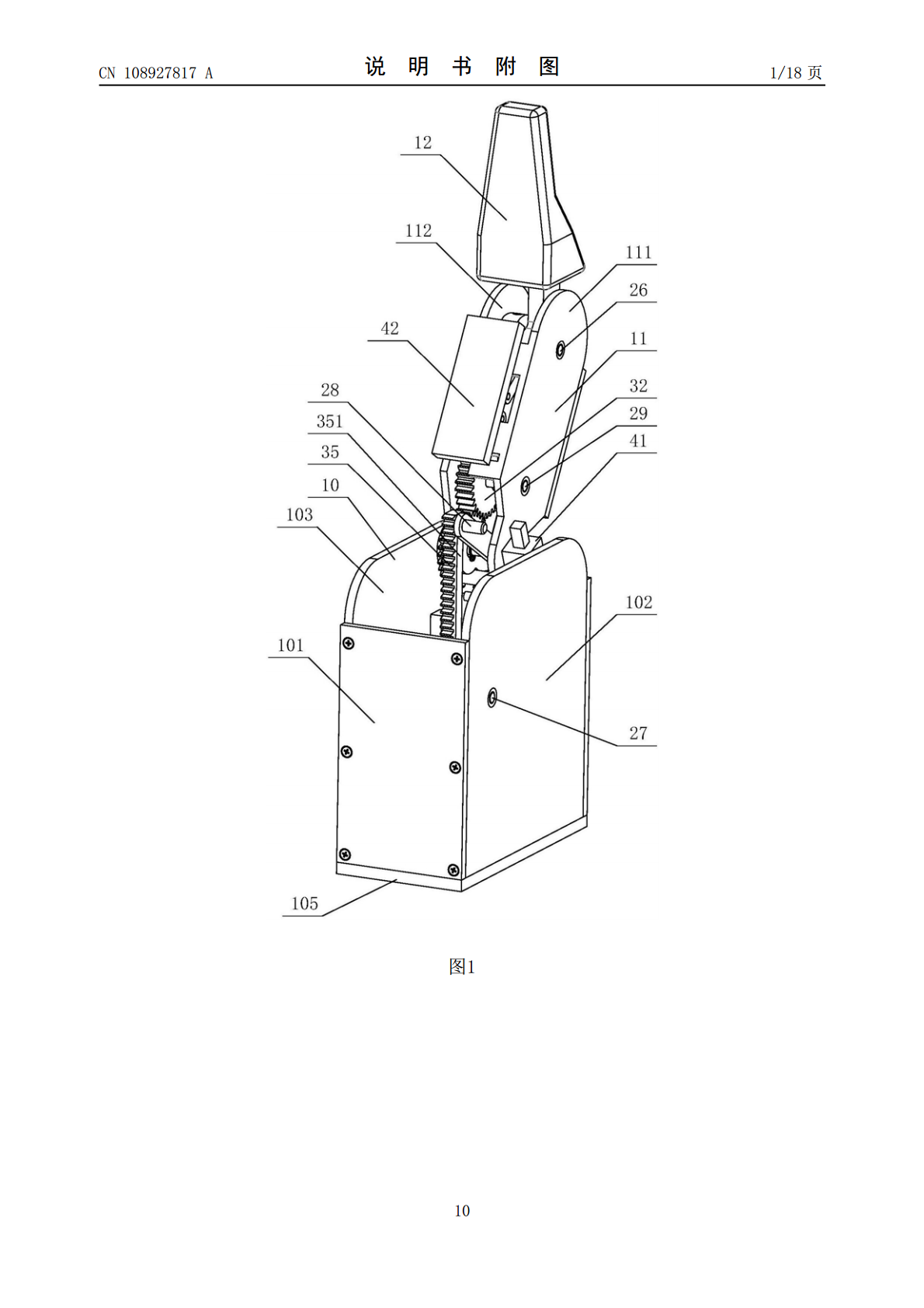
双齿条平夹间接自适应机器人手指装置.pdf
双齿条平夹间接自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、电机、三个齿轮、两个齿条、滑块、凸块拨盘、簧件和限位凸块等。该装置综合实现了平行夹持及自适应抓取的功能,根据目标物体形状和位置的不同,既能平动第二指段捏持物体或外张撑住,也能依次转动第一指段和第二指段包络不同形状、大小的物体;该装置抓取范围大;采用欠驱动的方式,利用一个电机驱动两个关节,无需复杂的传感和控制系统;该装置结构紧凑、体积小,制造和维护成本低,适用于机器人手。

连杆齿条直线平夹间接自适应机器人手指装置.pdf
连杆齿条直线平夹间接自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、齿条、多个齿轮、两个传动轮、传动件、导杆和簧件等。该装置实现了机器人手指直线平行夹持与自适应抓取的功能;采用连杆机构实现了远关节轴的直线运动,采用簧件配合齿条机构实现第二指段在第一抓取阶段保持相对基座固定的姿态;采用齿条机构实现当物体接触第一指段时,第二指段绕远关节轴的自适应转动;可以适应不同形状、大小物体的抓取;抓取范围大,抓取稳定可靠,结构简单、成本低。
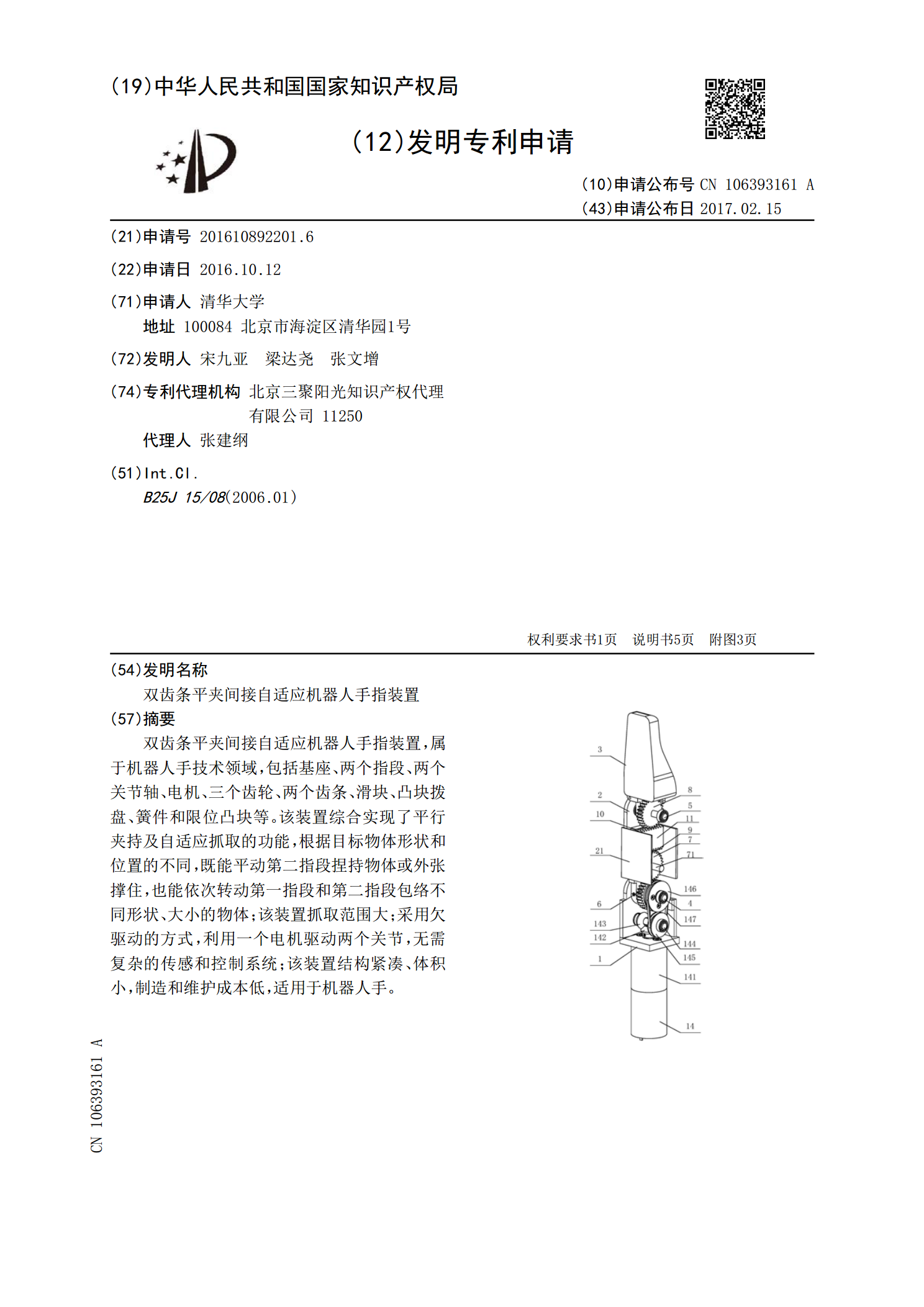
齿条滑杆直线平夹间接自适应机器人手指装置.pdf
齿条滑杆直线平夹间接自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、驱动器、主动杆、从动件、导杆、三个齿轮、两个齿条、两个滑块、簧件、限位凸块和限位柱。该装置既能平动第二指段夹持物体,也能在第一指段接触物体之后再转动第二指段包络物体,达到自适应包络不同形状、尺寸物体的目的;在平动第二指段夹持物体的阶段,第二指段末端始终保持直线的轨迹运动,适合在工作台上抓取薄板物体,减少机械臂编程需求;仅用一个驱动器驱动两个关节,结构简单,加工、装配和维护成本低,无需复杂的传感和控制系统,适用于
滑槽双曲柄直线平夹自适应机器人手指装置.pdf
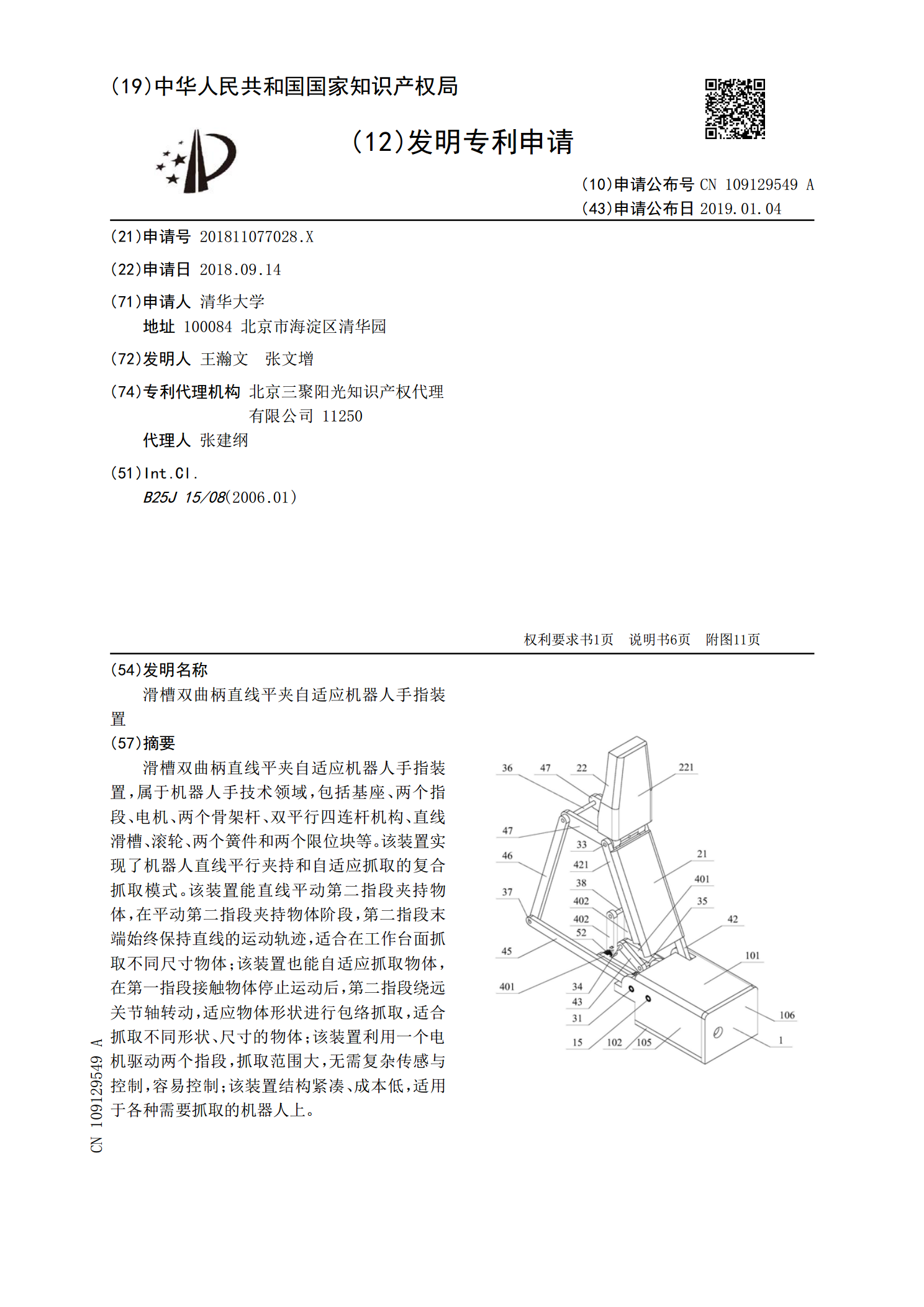
滑槽双曲柄直线平夹自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、电机、两个骨架杆、双平行四连杆机构、直线滑槽、滚轮、两个簧件和两个限位块等。该装置实现了机器人直线平行夹持和自适应抓取的复合抓取模式。该装置能直线平动第二指段夹持物体,在平动第二指段夹持物体阶段,第二指段末端始终保持直线的运动轨迹,适合在工作台面抓取不同尺寸物体;该装置也能自适应抓取物体,在第一指段接触物体停止运动后,第二指段绕远关节轴转动,适应物体形状进行包络抓取,适合抓取不同形状、尺寸的物体;该装置利用一个电机驱动两个指