
基于超声波辅助定位的视觉跟踪移动机器人及控制方法.pdf

秀华****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于超声波辅助定位的视觉跟踪移动机器人及控制方法.pdf
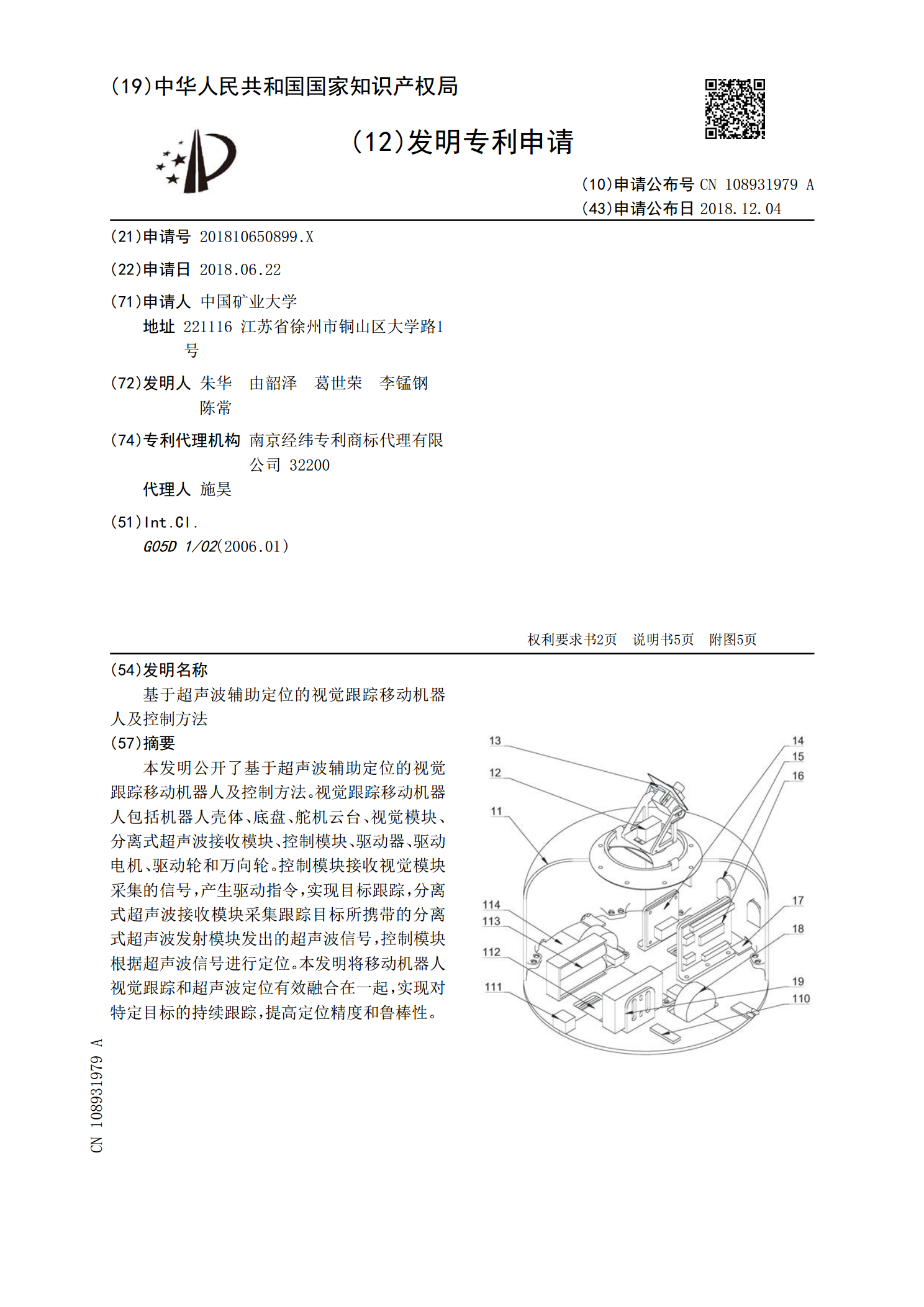
本发明公开了基于超声波辅助定位的视觉跟踪移动机器人及控制方法。视觉跟踪移动机器人包括机器人壳体、底盘、舵机云台、视觉模块、分离式超声波接收模块、控制模块、驱动器、驱动电机、驱动轮和万向轮。控制模块接收视觉模块采集的信号,产生驱动指令,实现目标跟踪,分离式超声波接收模块采集跟踪目标所携带的分离式超声波发射模块发出的超声波信号,控制模块根据超声波信号进行定位。本发明将移动机器人视觉跟踪和超声波定位有效融合在一起,实现对特定目标的持续跟踪,提高定位精度和鲁棒性。

基于WIFI辅助定位的视觉跟踪移动机器人及控制方法.pdf
本发明公开了一种基于WIFI辅助定位的视觉跟踪移动机器人及控制方法。视觉跟踪移动机器人包括机器人壳体、底盘、舵机云台、视觉模块、WIFI‑AP模块、控制模块、驱动器、驱动电机、驱动轮和万向轮。控制模块与舵机云台、视觉模块、WIFI‑AP模块和驱动器电性连接;舵机云台置于机器人壳体外侧的顶部,视觉模块安装在舵机云台上;WIFI‑AP模块至少设置3个,安装在机器人壳体外侧不同位置;控制模块接收视觉模块采集的信号,产生驱动指令,实现目标跟踪,控制模块接收WIFI‑AP模块采集的信号进行机器人位置定位。本发明将移

单目视觉自然路标辅助的移动机器人定位方法.docx
单目视觉自然路标辅助的移动机器人定位方法标题:单目视觉自然路标辅助的移动机器人定位方法摘要:移动机器人在室内或室外环境中进行定位是一项关键的任务,而自然路标(例如墙壁、地板和家具等)的利用是一种有效的定位方法。本文提出了一种基于单目视觉的自然路标辅助的移动机器人定位方法。首先,通过计算机视觉技术提取环境中的自然路标特征。然后,通过特征匹配和滤波算法获取机器人的位置和姿态。最后,通过实验验证了该方法的有效性和鲁棒性。1.引言移动机器人的定位对于机器人导航、环境建图和路径规划等任务至关重要。传统的定位方法主要

基于视觉的移动机器人目标跟踪方法.docx
基于视觉的移动机器人目标跟踪方法随着科技的不断进步和发展,机器人技术成为当今最受关注的领域之一。在移动机器人领域,目标跟踪是最基本的任务之一。目标跟踪是指移动机器人通过感知和识别目标来实现自主的智能控制,从而实现目标追踪和定位,进而完成任务。视觉技术是目前移动机器人相对成熟且广泛采用的技术之一,该技术通过对环境中的目标进行视觉识别和跟踪,并调整机器人的运动轨迹,从而实现目标跟踪。基于视觉的移动机器人目标跟踪主要包括以下步骤:1.图像采集:移动机器人通过搭载摄像头等传感器来采集环境中的图像。机器人的视觉系统

基于视觉的移动机器人目标跟踪方法.pptx
基于视觉的移动机器人目标跟踪方法目录添加章节标题视觉目标跟踪技术概述目标跟踪的定义和重要性目标跟踪的常见方法基于视觉的目标跟踪技术简介基于视觉的移动机器人目标跟踪方法移动机器人概述基于视觉的移动机器人目标跟踪原理基于视觉的移动机器人目标跟踪算法算法性能评估基于视觉的移动机器人目标跟踪技术应用移动机器人应用领域目标跟踪技术在移动机器人中的应用移动机器人目标跟踪技术的发展趋势基于视觉的移动机器人目标跟踪技术面临的挑战与解决方案面临的挑战解决方案未来研究方向基于视觉的移动机器人目标跟踪技术的实际案例分析案例一: