
一种适用于管材的夹持稳定性机械手及其操作方法.pdf

飞飙****ng

1/6
2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种适用于管材的夹持稳定性机械手及其操作方法.pdf
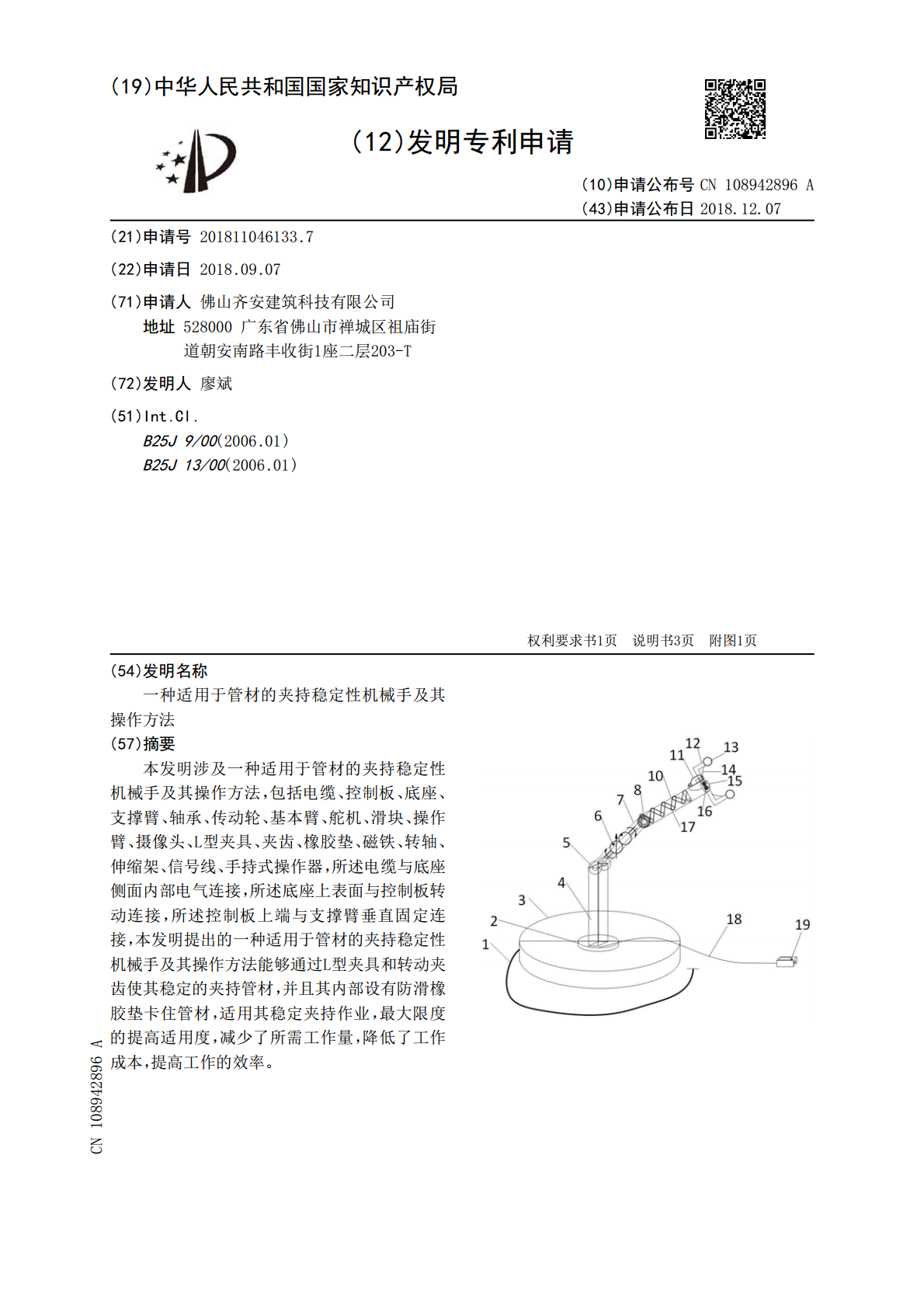
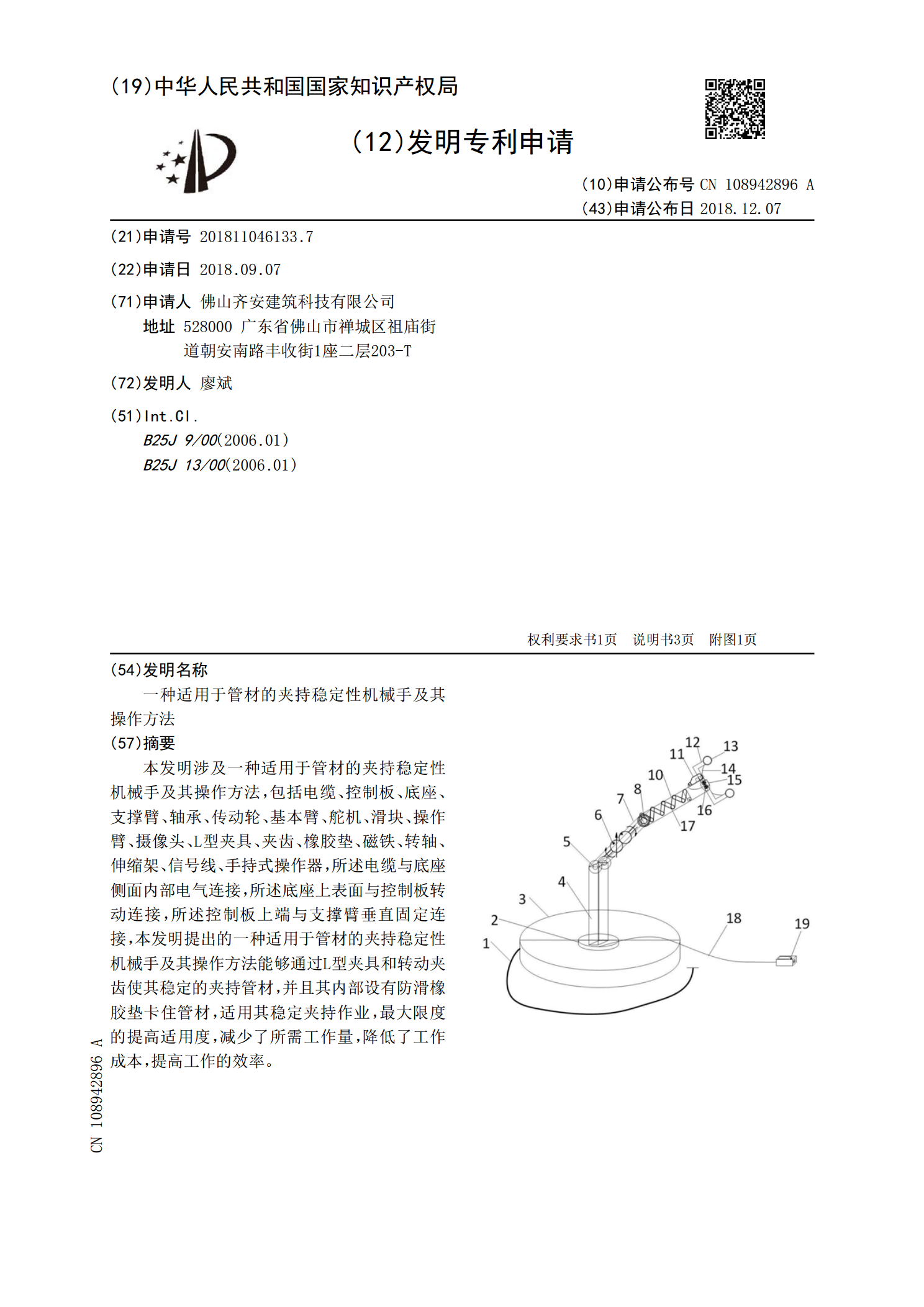
本发明涉及一种适用于管材的夹持稳定性机械手及其操作方法,包括电缆、控制板、底座、支撑臂、轴承、传动轮、基本臂、舵机、滑块、操作臂、摄像头、L型夹具、夹齿、橡胶垫、磁铁、转轴、伸缩架、信号线、手持式操作器,所述电缆与底座侧面内部电气连接,所述底座上表面与控制板转动连接,所述控制板上端与支撑臂垂直固定连接,本发明提出的一种适用于管材的夹持稳定性机械手及其操作方法能够通过L型夹具和转动夹齿使其稳定的夹持管材,并且其内部设有防滑橡胶垫卡住管材,适用其稳定夹持作业,最大限度的提高适用度,减少了所需工作量,降低了工作
一种夹持装置及其操作方法.pdf
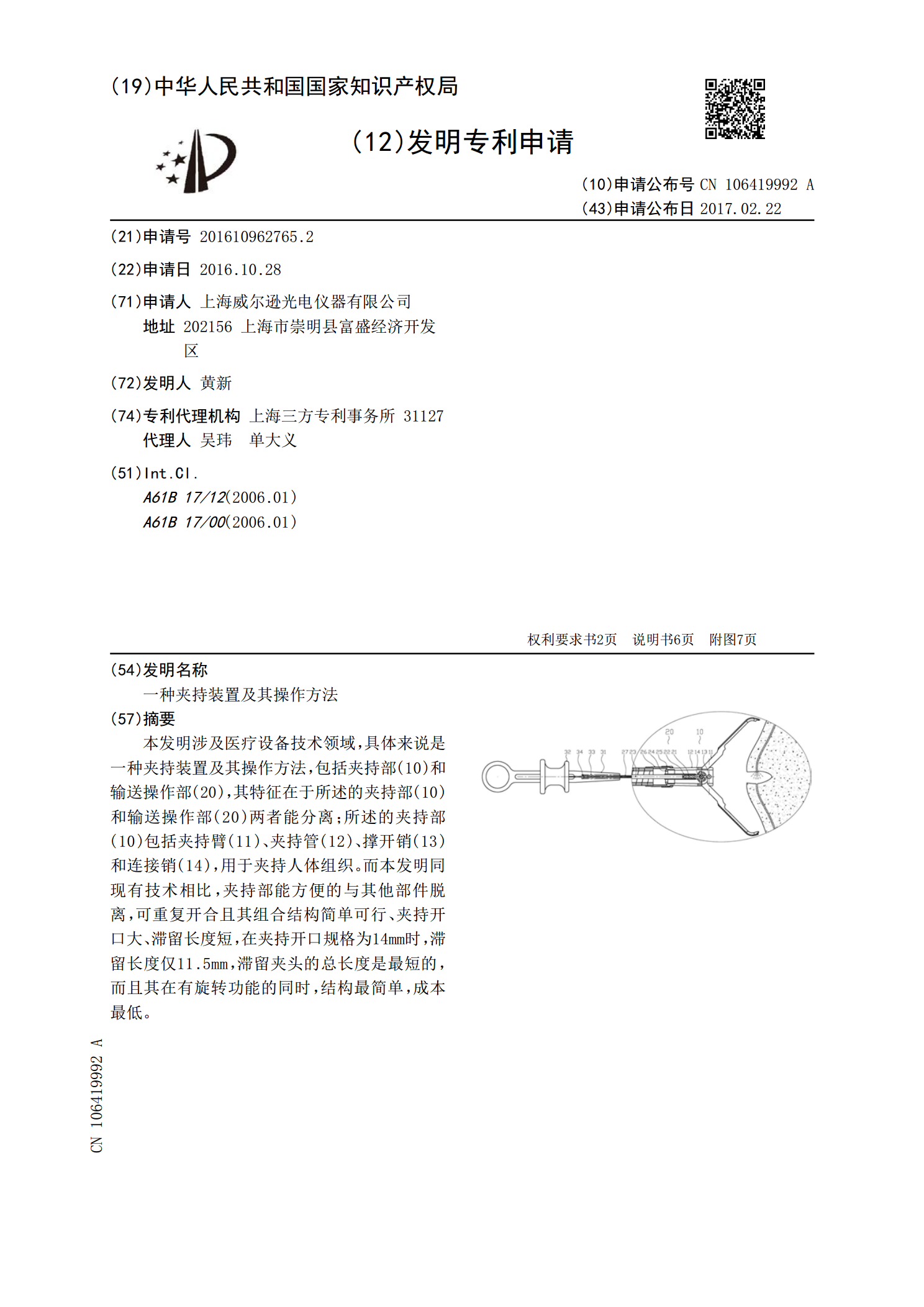
本发明涉及医疗设备技术领域,具体来说是一种夹持装置及其操作方法,包括夹持部(10)和输送操作部(20),其特征在于所述的夹持部(10)和输送操作部(20)两者能分离;所述的夹持部(10)包括夹持臂(11)、夹持管(12)、撑开销(13)和连接销(14),用于夹持人体组织。而本发明同现有技术相比,夹持部能方便的与其他部件脱离,可重复开合且其组合结构简单可行、夹持开口大、滞留长度短,在夹持开口规格为14mm时,滞留长度仅11.5mm,滞留夹头的总长度是最短的,而且其在有旋转功能的同时,结构最简单,成本最低。
机械手及其夹持方法.pdf
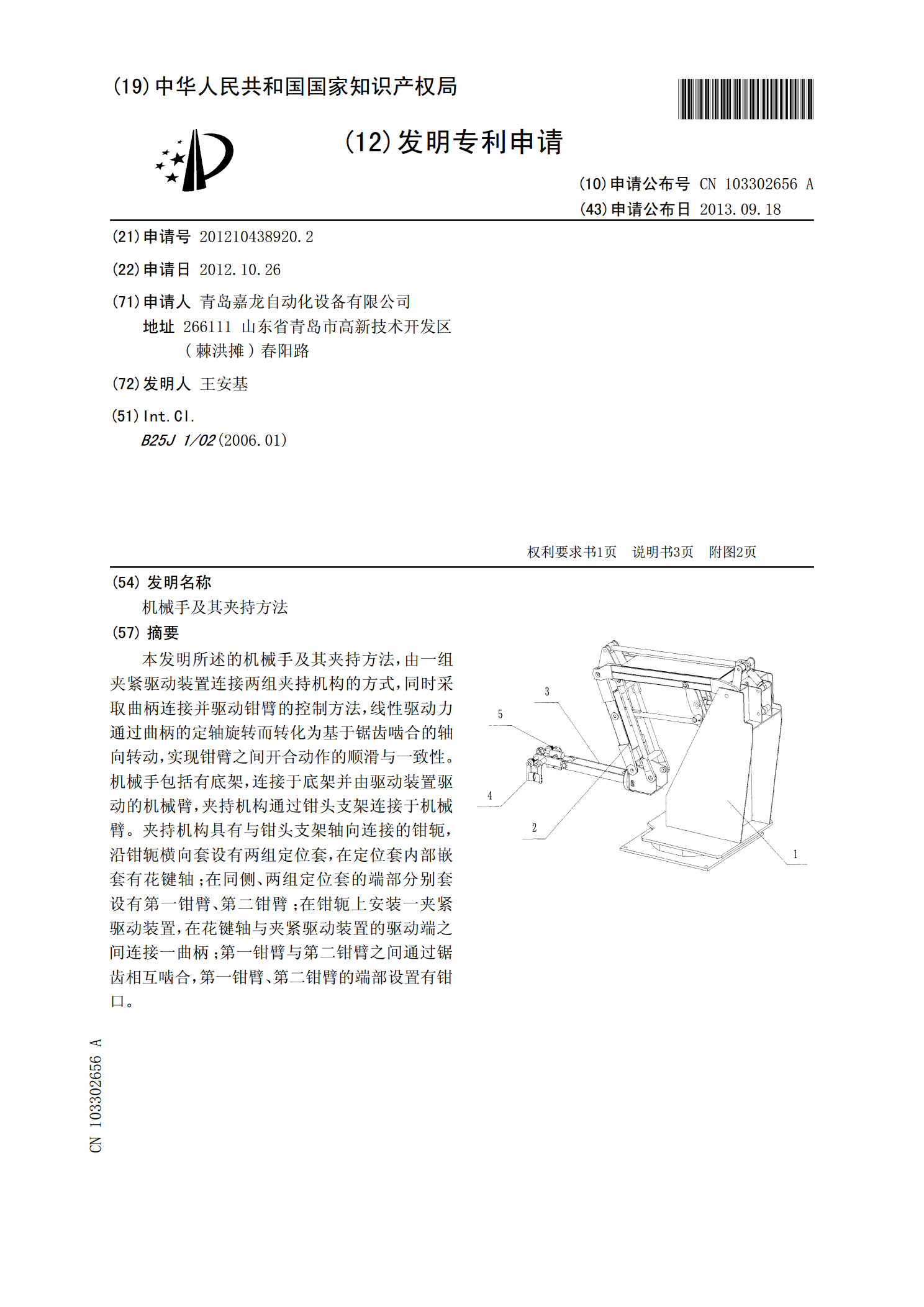
本发明所述的机械手及其夹持方法,由一组夹紧驱动装置连接两组夹持机构的方式,同时采取曲柄连接并驱动钳臂的控制方法,线性驱动力通过曲柄的定轴旋转而转化为基于锯齿啮合的轴向转动,实现钳臂之间开合动作的顺滑与一致性。机械手包括有底架,连接于底架并由驱动装置驱动的机械臂,夹持机构通过钳头支架连接于机械臂。夹持机构具有与钳头支架轴向连接的钳轭,沿钳轭横向套设有两组定位套,在定位套内部嵌套有花键轴;在同侧、两组定位套的端部分别套设有第一钳臂、第二钳臂;在钳轭上安装一夹紧驱动装置,在花键轴与夹紧驱动装置的驱动端之间连接一

一种适用于薄壁管材夹持的精密旋转轴装置.pdf
本发明提出一种适用于薄壁管材夹持的精密旋转轴装置,包括电机、联轴器、蜗杆、蜗轮、拉杆模块、外壳、端盖、夹头;拉杆模块包括拉杆盖、活塞、拉杆座、滚动轴承、轴套、拉杆;外壳的一端设置拉杆盖、拉杆座,另一端设置端盖;拉杆盖、拉杆座之间设有活塞、轴套、滚动轴承;活塞的两侧分别设有第一气腔、第二气腔,第一气腔、第二气腔分别设有出入口,通过出入口充放气;夹头设置于拉杆的一端,穿过端盖露出一部分;联轴器将电机的输出轴和蜗杆轴连接,蜗杆与蜗轮配合,蜗轮与拉杆共轴,蜗轮轴即为拉杆轴;电机的转动最终带动拉杆轴旋转运动。通过本

一种管材夹持装置.pdf
本发明公开了一种管材夹持装置,包括底座、支杆、圆环以及固定机构,支杆为竖直状,固定在底座表面,圆环固定设置于支杆的顶端,且支杆顶端固定在圆环的侧面,固定机构设置在圆环上,用来对管材进行紧固。本发明通过将管材放置在圆环内,用固定机构锁紧,然后在用刀具将管材进行截断,更加安全,且有效的保护了桌面。