
鸡饲料混合装置.pdf

是你****馨呀


1/6
2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

鸡饲料混合装置.pdf
本方案公开了饲料加工设备领域的一种鸡饲料混合装置,包括底座、混料锅、翻动机构和动力机构;动力机构包括第一电机,第一电机的输出轴固定连接有主动齿轮;混料锅的外底部固定连接有转轴,转轴上连接有从动齿轮,从动齿轮与主动齿轮啮合;翻动机构包括双摇杆机构和翻动爪,双摇杆机构包括主动臂、联动臂和从动臂,联动臂的两端分别铰接在主动臂和从动臂其中一端的端部,主动臂的另一端固定连接有第二电机的输出轴,从动臂的另一端铰接在底座上;翻动爪与联动臂连接。本方案中只有翻动爪运动到最低端时会与混料锅接触,翻动爪与混料锅发生接触的时间
一种鸡饲料均匀混合装置.pdf
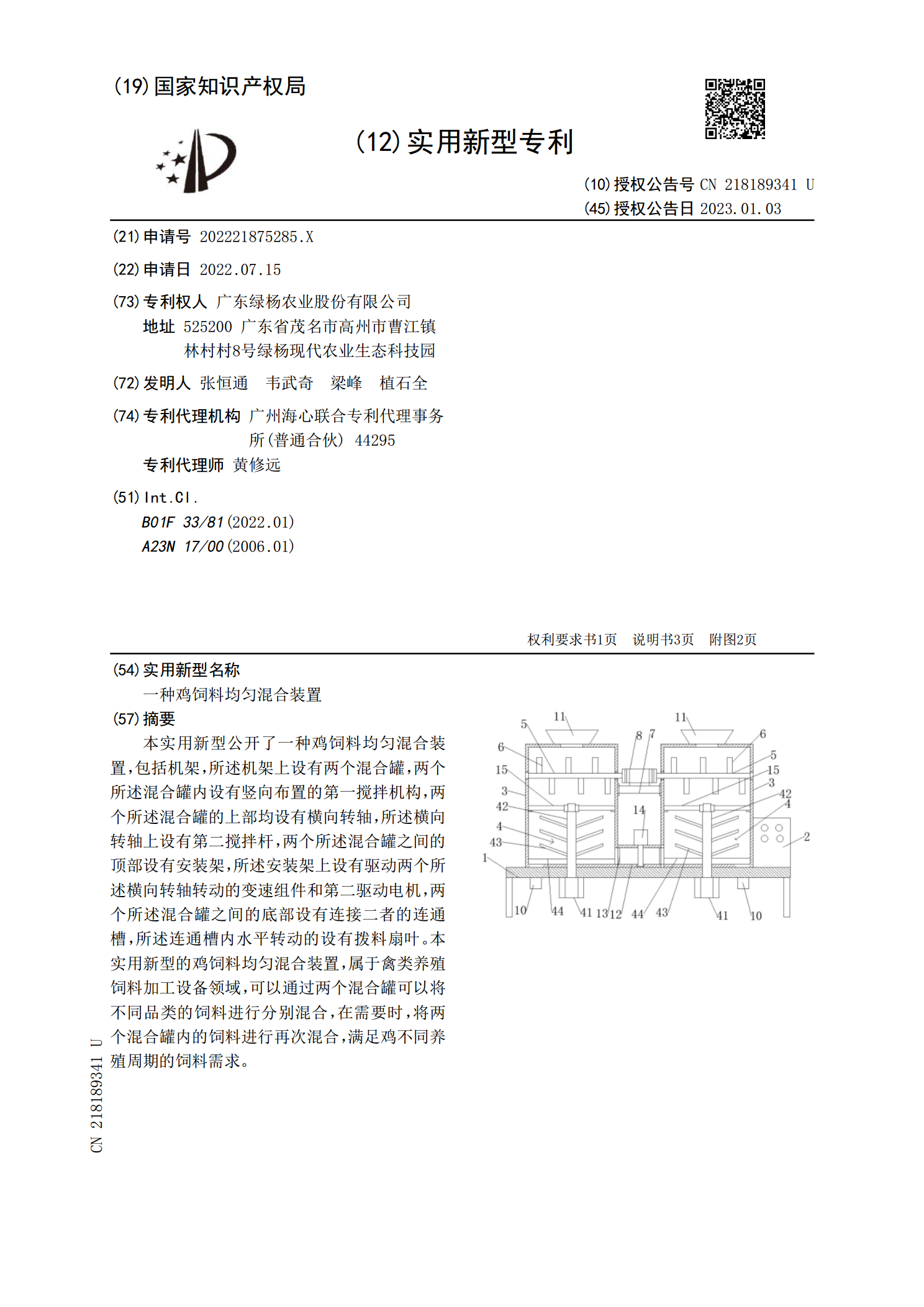
本实用新型公开了一种鸡饲料均匀混合装置,包括机架,所述机架上设有两个混合罐,两个所述混合罐内设有竖向布置的第一搅拌机构,两个所述混合罐的上部均设有横向转轴,所述横向转轴上设有第二搅拌杆,两个所述混合罐之间的顶部设有安装架,所述安装架上设有驱动两个所述横向转轴转动的变速组件和第二驱动电机,两个所述混合罐之间的底部设有连接二者的连通槽,所述连通槽内水平转动的设有拨料扇叶。本实用新型的鸡饲料均匀混合装置,属于禽类养殖饲料加工设备领域,可以通过两个混合罐可以将不同品类的饲料进行分别混合,在需要时,将两个混合罐内的
一种鸡饲料混合搅拌装置.pdf
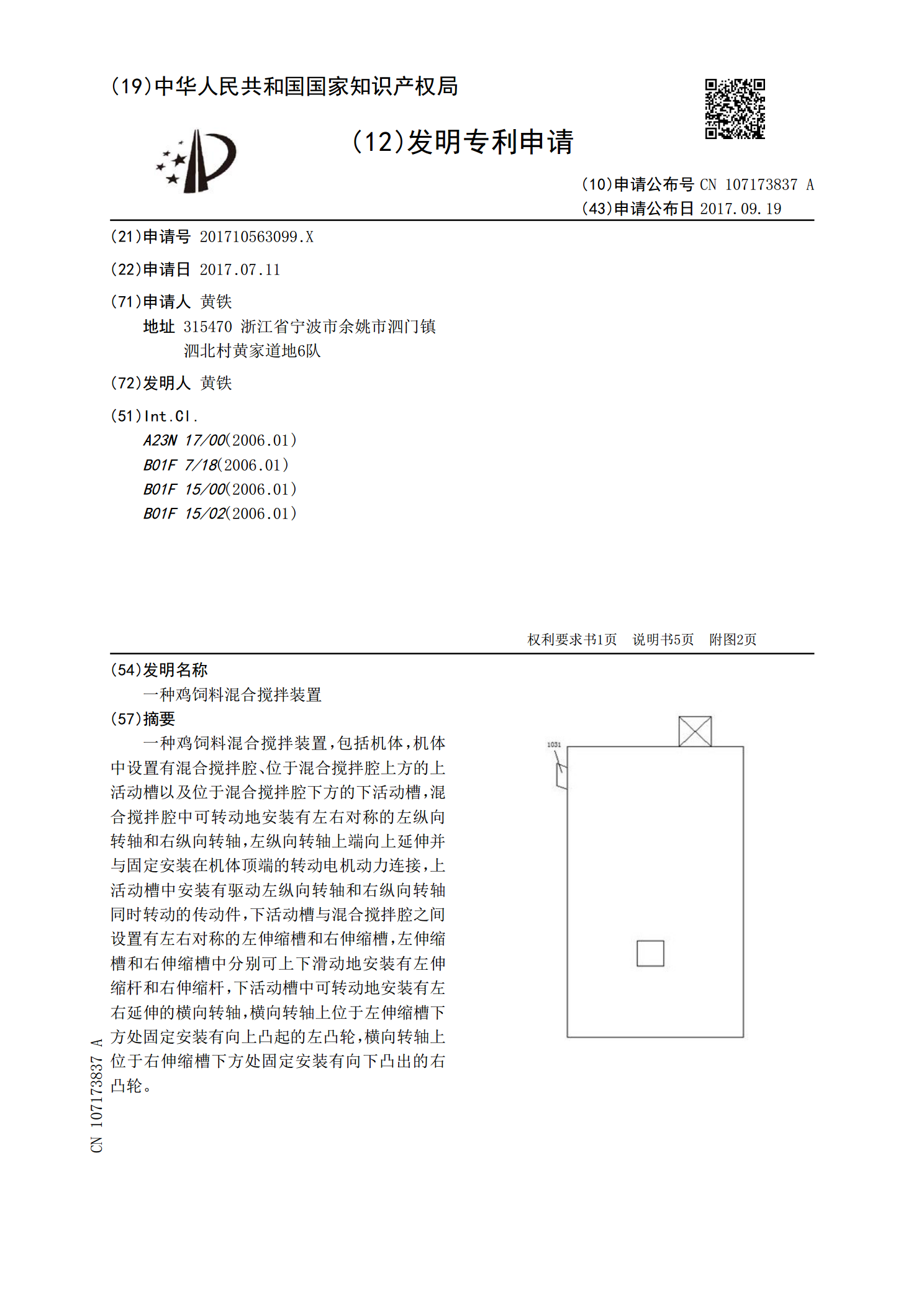
一种鸡饲料混合搅拌装置,包括机体,机体中设置有混合搅拌腔、位于混合搅拌腔上方的上活动槽以及位于混合搅拌腔下方的下活动槽,混合搅拌腔中可转动地安装有左右对称的左纵向转轴和右纵向转轴,左纵向转轴上端向上延伸并与固定安装在机体顶端的转动电机动力连接,上活动槽中安装有驱动左纵向转轴和右纵向转轴同时转动的传动件,下活动槽与混合搅拌腔之间设置有左右对称的左伸缩槽和右伸缩槽,左伸缩槽和右伸缩槽中分别可上下滑动地安装有左伸缩杆和右伸缩杆,下活动槽中可转动地安装有左右延伸的横向转轴,横向转轴上位于左伸缩槽下方处固定安装有向
一种新型鸡饲料混合搅拌装置.pdf
一种新型鸡饲料混合搅拌装置,包括机体,机体中设置有混合搅拌腔、位于混合搅拌腔上方的上活动槽以及位于混合搅拌腔下方的下活动槽,混合搅拌腔中可转动地安装有左右对称的左纵向转轴和右纵向转轴,左纵向转轴上端向上延伸并与固定安装在机体顶端的转动电机动力连接,上活动槽中安装有驱动左纵向转轴和右纵向转轴同时转动的传动件,下活动槽与混合搅拌腔之间设置有左右对称的左伸缩槽和右伸缩槽,左伸缩槽和右伸缩槽中分别可上下滑动地安装有左伸缩杆和右伸缩杆,下活动槽中可转动地安装有左右延伸的横向转轴,横向转轴上位于左伸缩槽下方处固定安装
一种实用型鸡饲料混合搅拌装置.pdf
一种实用型鸡饲料混合搅拌装置,包括机体,机体中设置有混合搅拌腔、位于混合搅拌腔上方的上活动槽以及位于混合搅拌腔下方的下活动槽,混合搅拌腔中可转动地安装有左右对称的左纵向转轴和右纵向转轴,左纵向转轴上端向上延伸并与固定安装在机体顶端的转动电机动力连接,上活动槽中安装有驱动左纵向转轴和右纵向转轴同时转动的传动件,下活动槽与混合搅拌腔之间设置有左右对称的左伸缩槽和右伸缩槽,左伸缩槽和右伸缩槽中分别可上下滑动地安装有左伸缩杆和右伸缩杆,下活动槽中可转动地安装有左右延伸的横向转轴,横向转轴上位于左伸缩槽下方处固定安