
一种多功能幕墙清洗用机器人.pdf

盼易****君a


1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多功能幕墙清洗用机器人.pdf
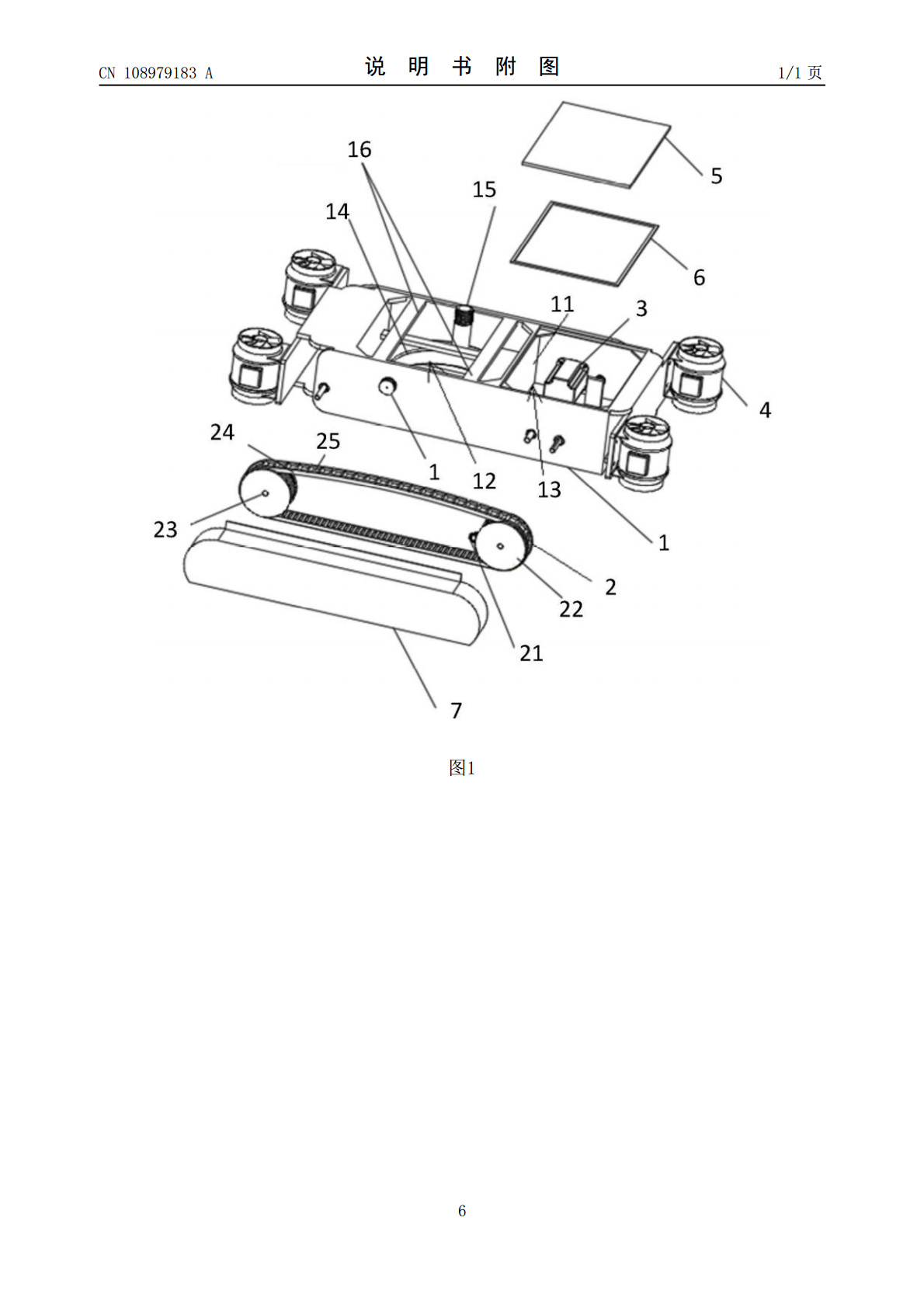
本发明公开了一种多功能幕墙清洗用机器人,属于幕墙清洗技术领域。包括机架,其呈长方形壳体结构,其中部设置有一竖隔板,竖隔板将机架的壳体结构分为第一空腔和第二空腔;第一空腔底部设置有负压吸附盘,第二空腔内设置有步进电机;机架上端面设置有用于安装清洗枪头的安装位;两个履带,分别设置在机架的两长侧边外侧,履带包括小齿轮、大齿轮、被动轮、同步带和N个真空杯;以及轴流风机,轴流风机数量为四个并分别设置在机架的两个短侧边外的两侧,轴流风机的中心轴垂直机架的下端面;本发明采用机器人在幕墙吸附和运动的新方法,解决现有的幕墙

一种幕墙玻璃清洗机器人.pdf
本发明涉及一种幕墙玻璃清洗机器人,包括绳索、铁质盘和擦玻璃机器人小车,所述绳索平行于幕墙表面;还包括有滑块结构,所述滑块结构的壳体中穿设平行的转轴I和转轴II,所述转轴I、转轴II上分别固定驱动轮、压紧轮,所述绳索穿于驱动轮和压紧轮的轮面之间;所述转轴I穿出壳体,并在端部套设固定蜗轮;所述滑块结构的壳体外固定有驱动电机,所述驱动电机输出转轴为蜗杆;所述蜗杆与蜗轮相互啮合;所述铁质盘固定于滑块结构上;所述擦玻璃机器人小车吸附于幕墙表面,并在擦玻璃机器人小车的外壳上设有与铁质盘对应的电磁吸盘。本发明能够方便地

一种幕墙用外设清洗设备.pdf
本发明涉及清洁工具技术领域,且公开了一种幕墙用外设清洗设备,包括升降杆,所述升降杆上套接有安装座,所述安装座的正面固定连接有电动推杆,所述电动推杆远离安装座的一端固定连接有连接杆,所述连接杆的正面从上到下依次固定连接有擦拭室、清洁室和喷水室,所述擦拭室的内腔左右两侧设置有第一活动辊和第二活动辊,所述擦拭室的右侧底部固定连接有第一电机。本发明通过第一电机、第一活动辊、第二活动辊、主动轮、从动轮、吸水布和出水口的配合可以对幕墙上的污物进行去除,去除效果好,而且不会存在水渍等残留物,另外通过这种方式不需要人工清

一种新型的幕墙清洗机器人.pdf
本发明涉及一种新型的幕墙清洗机器人,包括卷扬机,清洗机构,推力风机,控制系统,清洗机构由三个清洗单元上均设置支撑框架、刮板装置、滚刷结构、导向轮装置;三个清洗单元设置传动装置,自动控制系统包括PLC控制系统、吊装控制系统,机器人本体控制系统;吊装控制系统包括定位系统、行走控制系统,控制机器人本体的吊装、电缆的吊装、水管的吊装,机器人本体控制系统包括喷淋及清洗系统、稳定平衡系统、窗框识别系统和预警及处理系统。本发明结构合理,安全性强,清洗面积可调整,清洗彻底,具有实用化的控制系统,保证清洗机器人实现自动平衡
一种圆锥幕墙清洗机器人系统.pdf
一种圆锥幕墙清洗机器人系统,主要由辅助运动装置、清洗机器人、水循环系统和控制系统组成;所述的辅助运动装置由机器人悬挂装置、同步带传动装置、顶部轨道车、底部轨道车及环形导轨等组成;所述的悬挂装置固定在同步带的一侧,并通过活动滚轮套在另一侧同步带上以提高同步带的稳定性;所述的水循环系统由净水箱、污水箱、过滤器、负压发生器、水泵、管路等组成;所述的清洗机器人主要由框架、内框架、清洗条刷、吸附装置、z向驱动装置和下条刷驱动装置等组成;本发明结构简单,布置合理,工作效率较高,生产成本较低,运行平稳,操作简便,能够较