
一种3D打印喷头末端轮廓实时提取方法.pdf

睿达****的的

1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种3D打印喷头末端轮廓实时提取方法.pdf
本发明提供了一种3D打印喷头末端轮廓实时提取方法,首先向机械臂输入一个模型;其次检测机械臂的倾斜方向,并启动悬挂在周围的四个相机中的正对于倾斜方向的两个,组成双目视觉系统,运用相关滤波算法对打印喷头进行跟踪,获取跟踪的ROI感兴趣区域,并对该区域的图像运用中值滤波和膨胀腐蚀操作,获取平滑的图像,再运用canny算法获取打印喷头末端的外轮廓。本发明解决了目前3D打印中,缺少反馈系统的问题,使打印喷头末端能实时准确有效的检测出来,为后续末端定位提供可靠地依据。
一种基于分类的3D打印喷头末端轮廓实时提取方法.pdf
本发明提供了一种基于分类的3D打印喷头末端轮廓实时提取方法,首先给机械臂输入一个模型,其次,检测机械臂的倾斜方向,根据倾斜方向判断所要启动的相机,并启动悬挂在周围的四个相机中的正对于倾斜方向的两个,组成双目视觉系统,运用跟踪算法对打印喷头进行跟踪,获取跟踪的ROI感兴趣区域,并对该区域的图像运用kmeans算法进行分类,并获取喷头所在的类的图像,通过高斯低通滤波平滑处理后再运用canny算法获取打印末端的外轮廓。本发明解决了目前3D打印中,缺少反馈系统的问题,使打印喷头末端能实时准确有效的检测出来,为后续
一种3D打印喷头末端实时跟踪定位方法.pdf
本发明提供了一种3D打印喷头末端实时跟踪定位方法,首先向机械臂输入一个模型;其次检测机械臂的倾斜方向,并启动悬挂在周围的四个相机中的正对于倾斜方向的两个相机,组成双目视觉系统,运用跟踪算法对打印喷头进行跟踪,获取跟踪的ROI感兴趣区域,并对该区域的图像运用kmeans算法进行分类,并获取喷头所在的类的图像,通过运用canny算法获取打印末端的外轮廓和横坐标,之后运用hough直线检测方法,对该边缘图像进行直线检测,并判断喷头两边的直线,计算出直线与边缘图像横坐标交汇的中点位置,即为跟踪位置。本发明通过视觉
基于中心点判断的3D打印喷头末端实时跟踪定位方法.pdf
本发明提供了一种基于中心点判断的3D打印喷头末端实时跟踪定位方法。首先向机械臂输入一个模型;其次检测机械臂的倾斜方向,并启动悬挂在周围的四个相机中的正对于倾斜方向的两个,组成双目视觉系统,运用跟踪算法对打印喷头进行跟踪,获取跟踪的ROI感兴趣区域,并对该区域的图像运用中值滤波和膨胀腐蚀操作,获取平滑的图像,再运用canny算法获取打印喷头末端的外轮廓和横坐标,之后运用hough直线检测方法,对该边缘图像进行直线检测,并判断喷头两边的直线,通过数学计算,算出直线与边缘图像横坐标交汇的中点位置,即为跟踪定位位
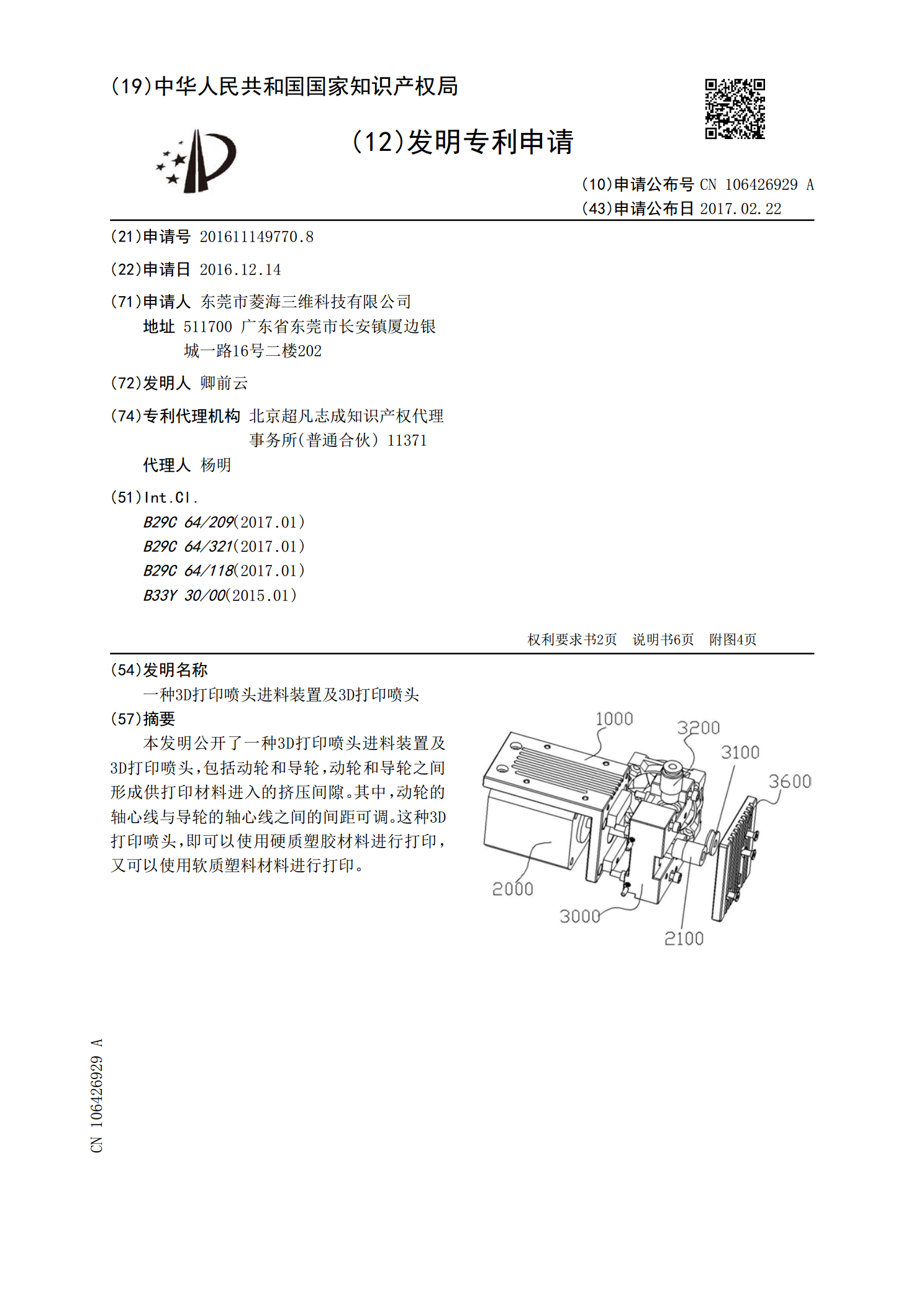
一种3D打印喷头进料装置及3D打印喷头.pdf
本发明公开了一种3D打印喷头进料装置及3D打印喷头,包括动轮和导轮,动轮和导轮之间形成供打印材料进入的挤压间隙。其中,动轮的轴心线与导轮的轴心线之间的间距可调。这种3D打印喷头,即可以使用硬质塑胶材料进行打印,又可以使用软质塑料材料进行打印。