
一种轮毂驱动电动汽车悬架系统与减振元件参数匹配优化设计方法.pdf

玉环****找我


1/9

2/9

3/9

4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮毂驱动电动汽车悬架系统与减振元件参数匹配优化设计方法.pdf
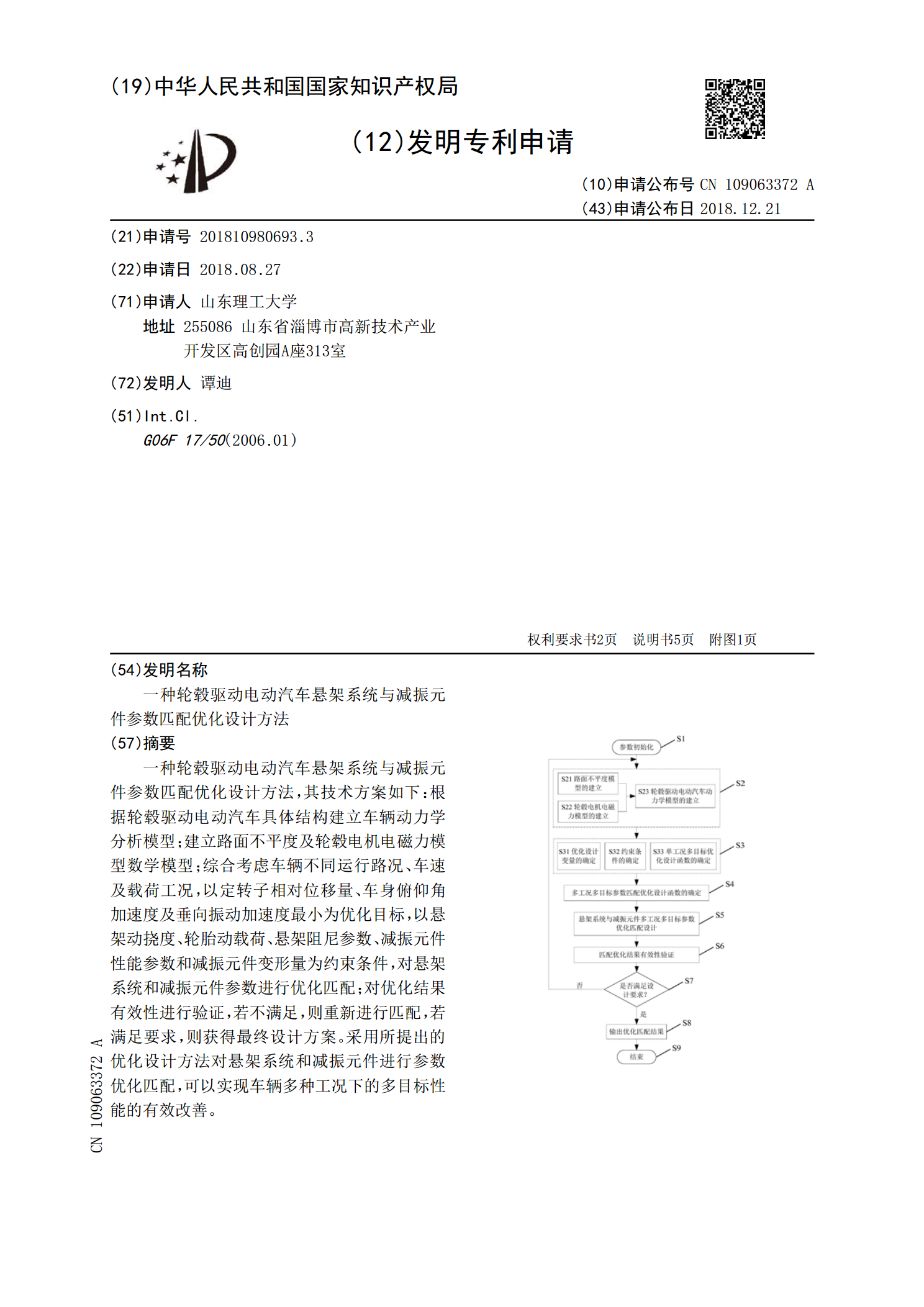
一种轮毂驱动电动汽车悬架系统与减振元件参数匹配优化设计方法,其技术方案如下:根据轮毂驱动电动汽车具体结构建立车辆动力学分析模型;建立路面不平度及轮毂电机电磁力模型数学模型;综合考虑车辆不同运行路况、车速及载荷工况,以定转子相对位移量、车身俯仰角加速度及垂向振动加速度最小为优化目标,以悬架动挠度、轮胎动载荷、悬架阻尼参数、减振元件性能参数和减振元件变形量为约束条件,对悬架系统和减振元件参数进行优化匹配;对优化结果有效性进行验证,若不满足,则重新进行匹配,若满足要求,则获得最终设计方案。采用所提出的优化设计方
一种轮毂电驱动系统减振元件设计方法.pdf
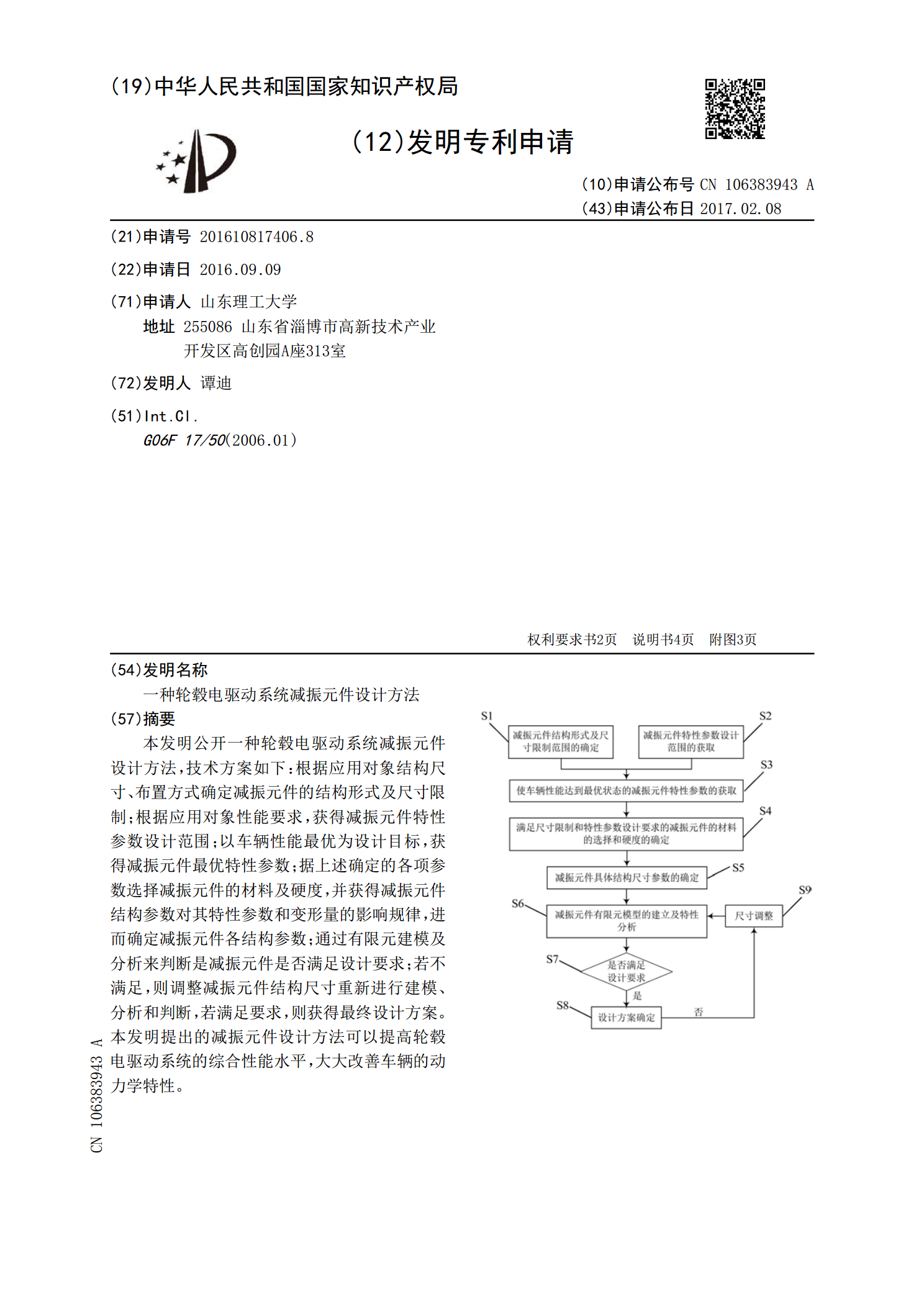
本发明公开一种轮毂电驱动系统减振元件设计方法,技术方案如下:根据应用对象结构尺寸、布置方式确定减振元件的结构形式及尺寸限制;根据应用对象性能要求,获得减振元件特性参数设计范围;以车辆性能最优为设计目标,获得减振元件最优特性参数;据上述确定的各项参数选择减振元件的材料及硬度,并获得减振元件结构参数对其特性参数和变形量的影响规律,进而确定减振元件各结构参数;通过有限元建模及分析来判断是减振元件是否满足设计要求;若不满足,则调整减振元件结构尺寸重新进行建模、分析和判断,若满足要求,则获得最终设计方案。本发明提出

一种轮毂电机车轮减振系统参数优化匹配方法.pdf
本发明公开了一种轮毂电机车轮减振系统参数优化匹配方法,该方法含有步骤:1)根据车辆平顺性四个评价指标来优化匹配电动轮减振系统参数;2)综合考虑改善车辆行驶舒适性和平顺性,建立统一适应度函数,并对参数进行进行约束和限制,利用参数优化算法获得步骤1)中期望的减振系统参数;3)采用粒子群算法获得最佳的减振系统参数。本发明公开的轮毂电机车轮减振系统参数优化匹配方法通过粒子群算法仿真优化得到轮内减振系统参数最优值,综合考虑具有与车身、车轴同时相连减振系统的电动轮,以能够改善车轮载荷和悬架动扰度的基本要求、降低车身加
与独立悬架匹配的电动汽车轮毂电驱动系统.pdf
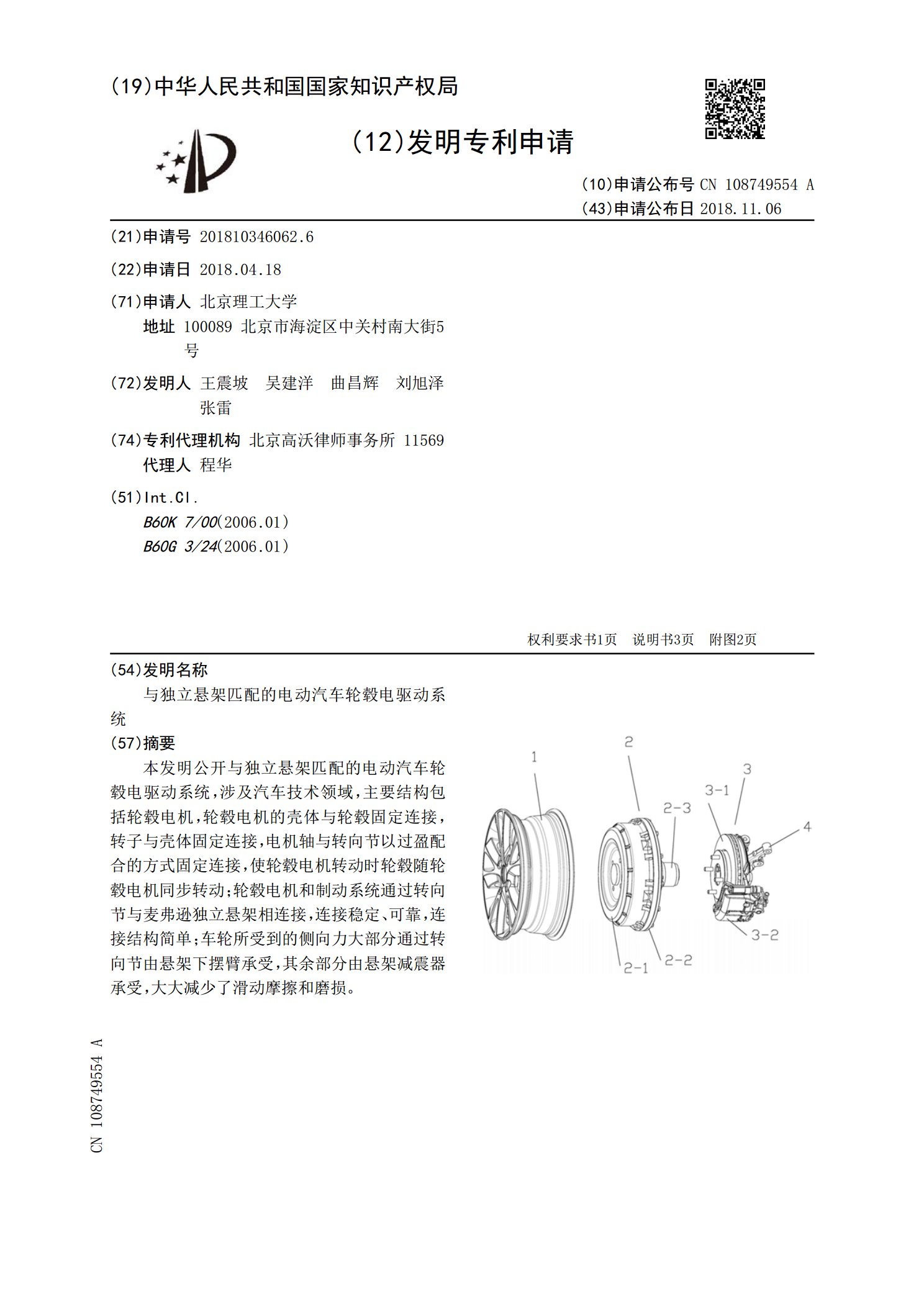
本发明公开与独立悬架匹配的电动汽车轮毂电驱动系统,涉及汽车技术领域,主要结构包括轮毂电机,轮毂电机的壳体与轮毂固定连接,转子与壳体固定连接,电机轴与转向节以过盈配合的方式固定连接,使轮毂电机转动时轮毂随轮毂电机同步转动;轮毂电机和制动系统通过转向节与麦弗逊独立悬架相连接,连接稳定、可靠,连接结构简单;车轮所受到的侧向力大部分通过转向节由悬架下摆臂承受,其余部分由悬架减震器承受,大大减少了滑动摩擦和磨损。

纯电动汽车驱动系统的参数设计及匹配.docx
纯电动汽车驱动系统的参数设计及匹配张珍(长安大学)摘要:本文系统的介绍了纯电动汽车驱动系统主要部件的选型及根据电动汽车主要性能的要求进行主要参数的设计及匹配,并通过对具体的车型的计算,进一步探讨了主要参数的确定。关键词:纯电动汽车(EV)驱动系统参数设计1、前言纯电动汽车(EV)即蓄电池电动汽车是“零污染”的绿色环保交通工具,它没有噪声和振动、操作性能好等远远优于内燃机汽车。EV是当前开发和研制取代内燃机汽车的首选车型,其前景广阔。目前,我国的EV大都建立在改装车的基础上,其设计是一项机电一体化的综合工程