
一种考虑多目标分布式驱动电动汽车的转矩分配控制方法.pdf

猫巷****晓容


1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种考虑多目标分布式驱动电动汽车的转矩分配控制方法.pdf
本发明涉及一种考虑多目标分布式驱动电动汽车的转矩分配控制方法,包括步骤:1、通过台架试验获取电机与电机控制器效率场,并计算驱动功率和回馈制动功率;2、根据步骤1得到的各转速下电机与电机控制器的系统功率获取电机转矩的函数,同时计算轮胎耗散能及轮胎利用率;3、计算轮胎的输出力矩的约束范围;4、考虑电机与电机控制器的系统功率、轮胎耗散能和轮胎利用率,建立不同工况情况的转矩分配加权最小二乘优化函数,结合输出力矩的约束范围进行求解,得到转矩分配结果。与现有技术相比,本发明具有车辆经济性好、稳定性高以及轮胎磨损小等优
一种分布式驱动电动汽车的转矩分配控制方法.pdf
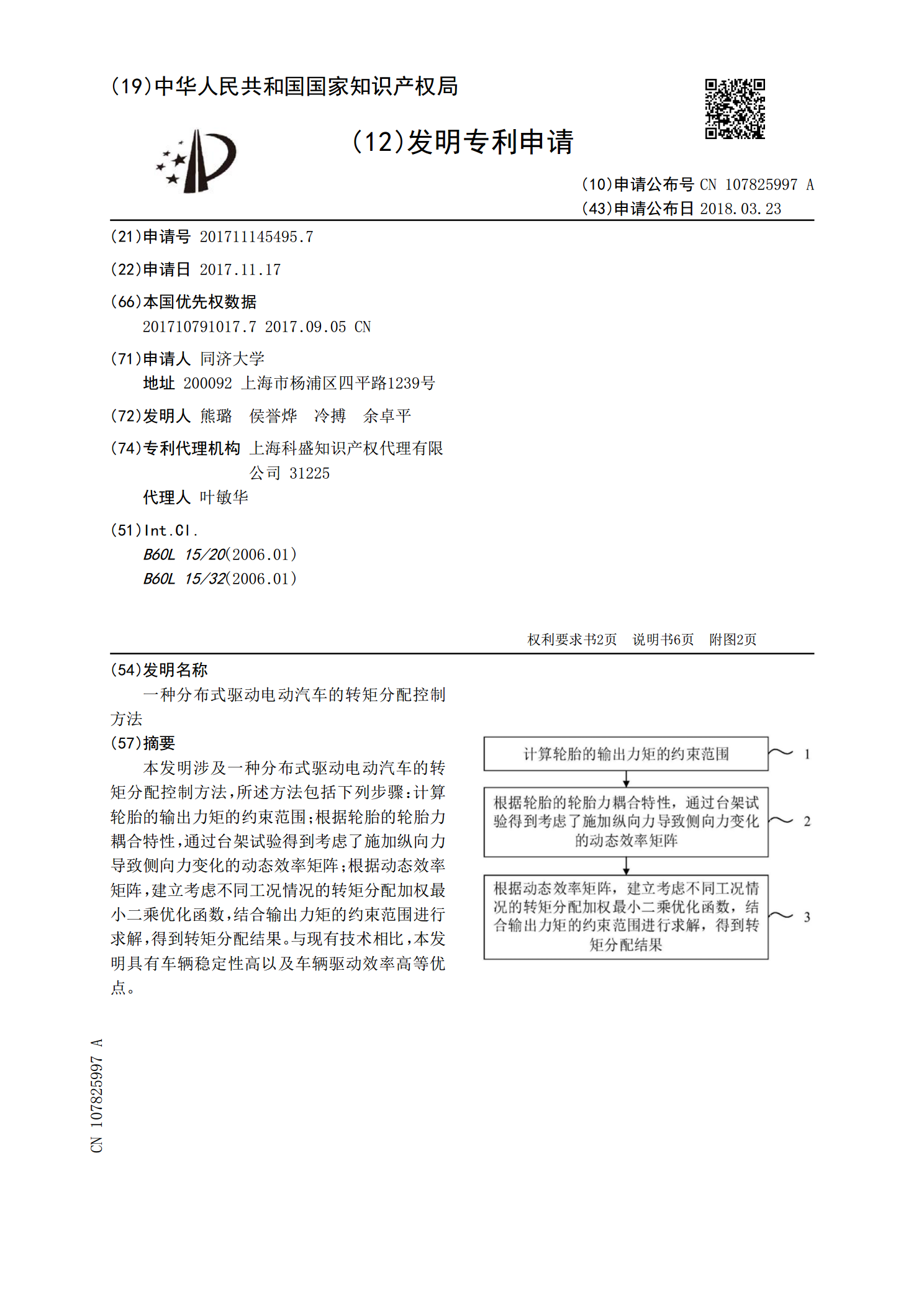
本发明涉及一种分布式驱动电动汽车的转矩分配控制方法,所述方法包括下列步骤:计算轮胎的输出力矩的约束范围;根据轮胎的轮胎力耦合特性,通过台架试验得到考虑了施加纵向力导致侧向力变化的动态效率矩阵;根据动态效率矩阵,建立考虑不同工况情况的转矩分配加权最小二乘优化函数,结合输出力矩的约束范围进行求解,得到转矩分配结果。与现有技术相比,本发明具有车辆稳定性高以及车辆驱动效率高等优点。
分布式驱动电动汽车转矩矢量分配控制方法.pdf
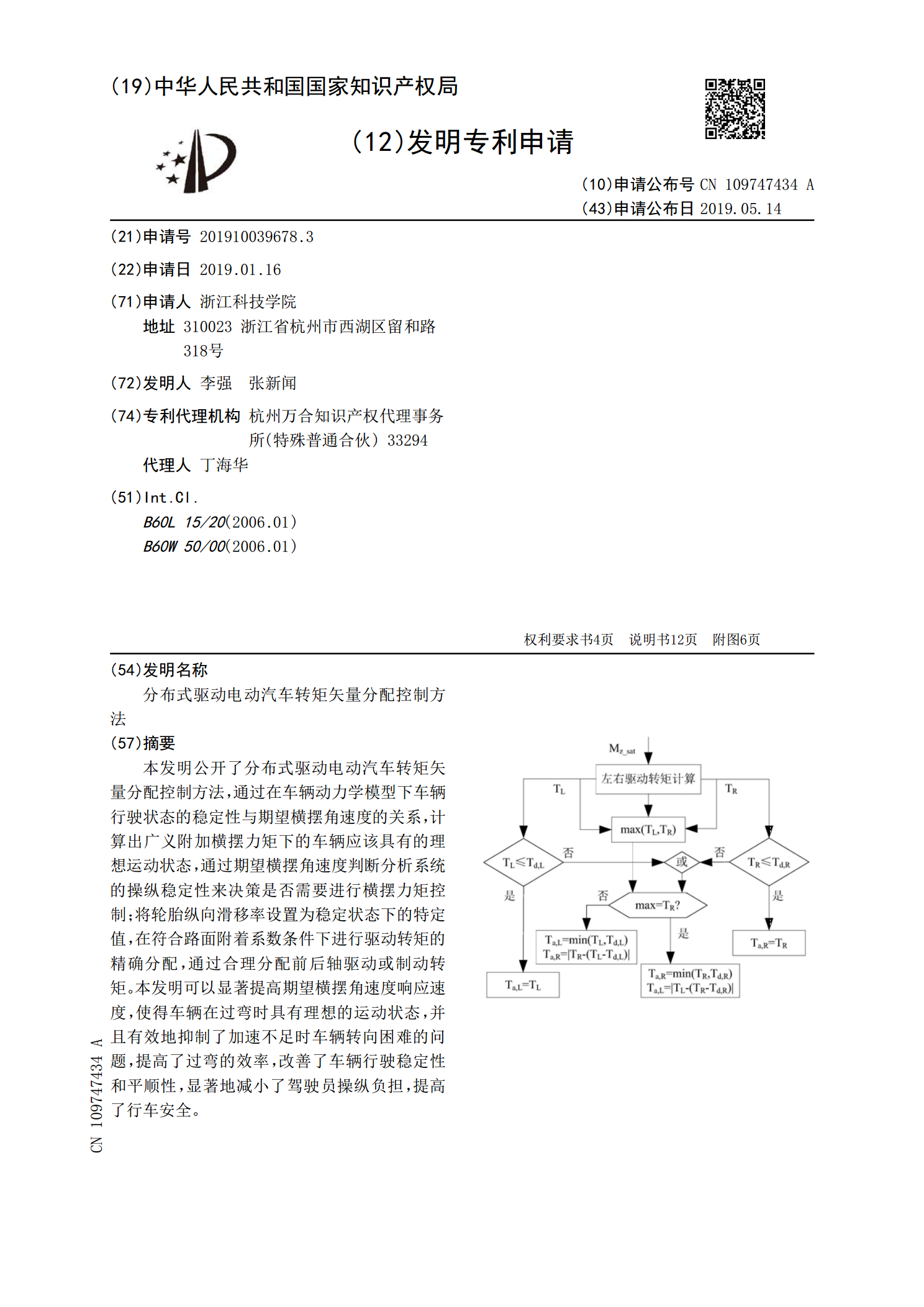
本发明公开了分布式驱动电动汽车转矩矢量分配控制方法,通过在车辆动力学模型下车辆行驶状态的稳定性与期望横摆角速度的关系,计算出广义附加横摆力矩下的车辆应该具有的理想运动状态,通过期望横摆角速度判断分析系统的操纵稳定性来决策是否需要进行横摆力矩控制;将轮胎纵向滑移率设置为稳定状态下的特定值,在符合路面附着系数条件下进行驱动转矩的精确分配,通过合理分配前后轴驱动或制动转矩。本发明可以显著提高期望横摆角速度响应速度,使得车辆在过弯时具有理想的运动状态,并且有效地抑制了加速不足时车辆转向困难的问题,提高了过弯的效率
一种分布式驱动电动汽车转矩优化分配控制方法.pdf
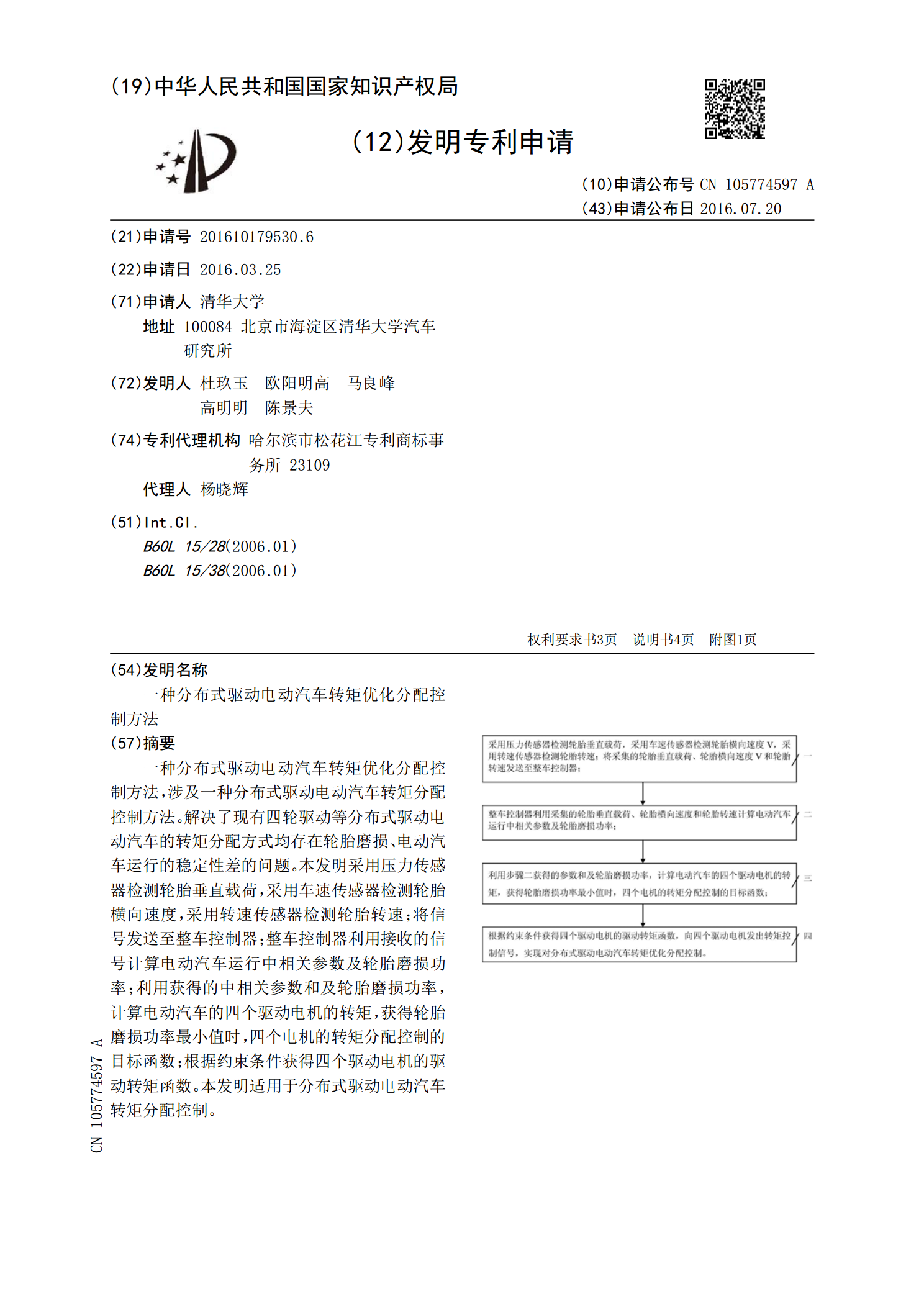
一种分布式驱动电动汽车转矩优化分配控制方法,涉及一种分布式驱动电动汽车转矩分配控制方法。解决了现有四轮驱动等分布式驱动电动汽车的转矩分配方式均存在轮胎磨损、电动汽车运行的稳定性差的问题。本发明采用压力传感器检测轮胎垂直载荷,采用车速传感器检测轮胎横向速度,采用转速传感器检测轮胎转速;将信号发送至整车控制器;整车控制器利用接收的信号计算电动汽车运行中相关参数及轮胎磨损功率;利用获得的中相关参数和及轮胎磨损功率,计算电动汽车的四个驱动电机的转矩,获得轮胎磨损功率最小值时,四个电机的转矩分配控制的目标函数;根据

分布式驱动电动汽车转矩分配策略综述.docx
分布式驱动电动汽车转矩分配策略综述黄亚东郭桂芳摘要:分布式驱动电动汽车的主要结构特征是将驱动电动机直接安装在驱动轮内或驱动轮附近,具有驱动传动链短、传动高效、结构紧凑等突出优点。电机独立驱动的优势使得每个电机能够实现精确控制,为提升分布式驱动电动汽车地盘动力学以及全线控技术提供了巨大优势基础。从电子差速技术和横向稳定性两方面的研究进展进行综述,介绍这两方面技术中所涉及到的驱动电机转矩分配技术和分配的方式,以及控制过程中所使用的算法。并对分布式驱动电动汽车转矩分配策略的研究方向做几点展望。关键词:分布式驱动