
门体平衡结构及包括其的洗碗机.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
门体平衡结构及包括其的洗碗机.pdf
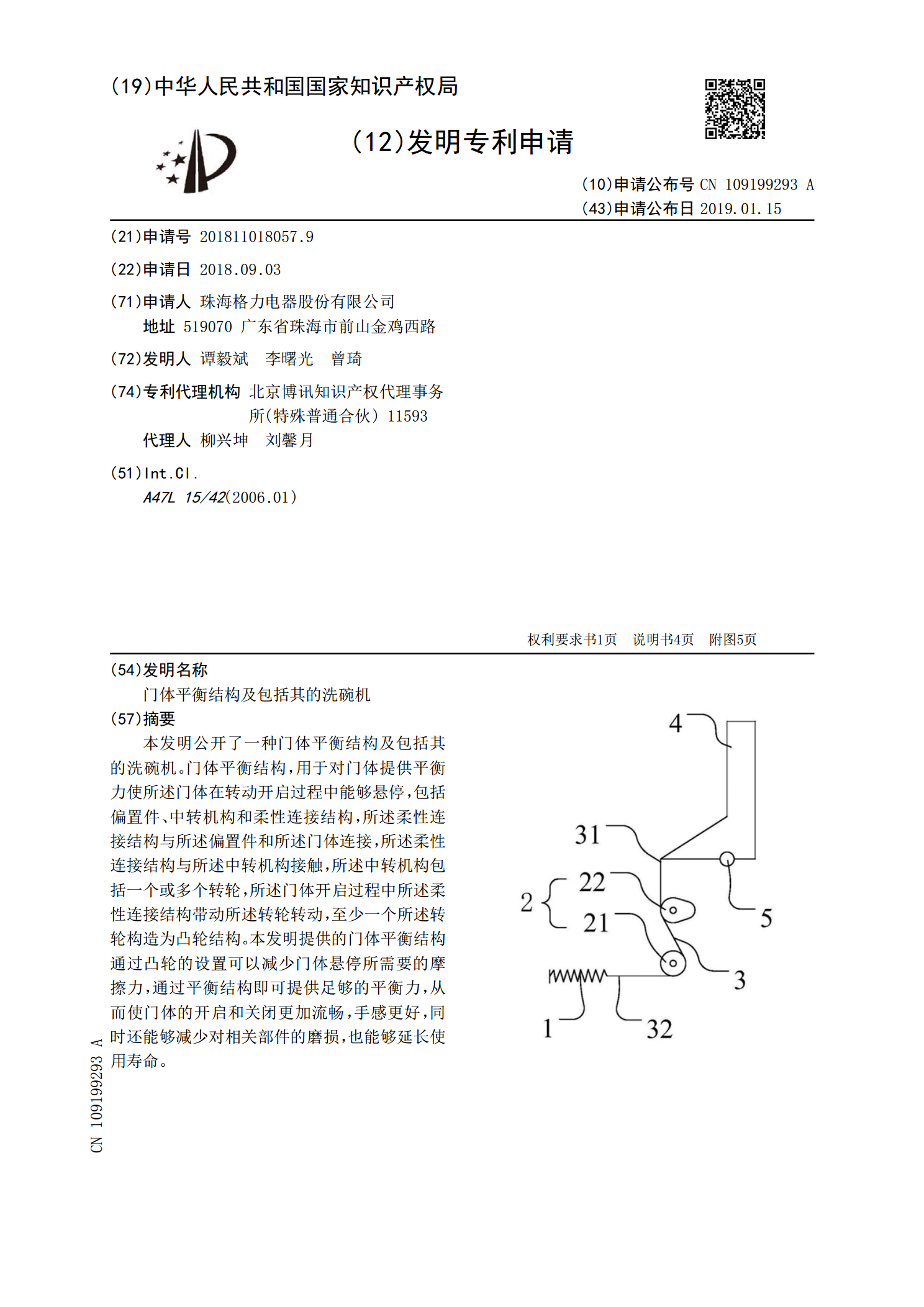
本发明公开了一种门体平衡结构及包括其的洗碗机。门体平衡结构,用于对门体提供平衡力使所述门体在转动开启过程中能够悬停,包括偏置件、中转机构和柔性连接结构,所述柔性连接结构与所述偏置件和所述门体连接,所述柔性连接结构与所述中转机构接触,所述中转机构包括一个或多个转轮,所述门体开启过程中所述柔性连接结构带动所述转轮转动,至少一个所述转轮构造为凸轮结构。本发明提供的门体平衡结构通过凸轮的设置可以减少门体悬停所需要的摩擦力,通过平衡结构即可提供足够的平衡力,从而使门体的开启和关闭更加流畅,手感更好,同时还能够减少对

门体结构以及包括其的电冰箱.pdf
本发明创造公开了门体结构,包括:闭环门框,其多个边框内均设有装配空间;门体组件,其安装于装配空间,门体组件包括至少两个门体,所有的门体均逐层嵌套,每相邻的两个门体均共同设有联动结构;位于门体组件一端的门体与闭环门框固定连接,位于门体组件另外一端的门体与闭环门框可拆连接。门体组件可通过门体之间的嵌套收纳来进行收拢,此时门体结构处于开门状态,这种开门方式不需要在开门方向上预留避让空间,且开门时不占用额外空间;另外,当用户需要关门时,只需提拉与闭环门框进行可拆连接的门体,即可使门体组件重新展开,并通过与闭环门框

泵及包括其的洗碗机.pdf
本发明提供一种移送洗涤水并生成蒸汽的泵及包括其的洗碗机,本发明的实施例的泵包括:壳体;洗涤水流入管,与壳体相连接,洗涤水流入洗涤水流入管;洗涤水流出管,与壳体相连接,洗涤水流出洗涤水流出管;叶轮,配置于壳体内部,用于使洗涤水流入管中流入的洗涤水向洗涤水流出管流出;加热器,与壳体相结合,用于加热壳体内部的洗涤水以生成蒸汽;以及蒸汽排出管,配置于洗涤水流出管,用于排出利用加热器生成的蒸汽。

泵及包括其的洗碗机.pdf
本发明提供一种使加热器均匀地加热泵的底部面的泵及包括其的洗碗机,本发明的实施例的泵包括:壳体,呈圆筒形状,在壳体的内部容置水;叶轮,能够进行旋转,将壳体内的水向外部排出;加热器盖,形成壳体的底部面;加热器板,接合于加热器盖的下侧;以及加热器,接合于加热器板的下侧,对加热器板进行加热,不与加热器盖直接接触。由此,加热器能够对加热器盖均匀地进行加热。

一种门体接水结构及具有该门体接水结构的洗碗机.pdf
本发明涉及一种门体接水结构及具有该门体接水结构的洗碗机,洗碗机包括机体,在机体的前方具有餐具投入口,在餐具投入口处安装有门体,在门体上设置有门体接水结构,在所述门体的底部安装有密封条,在所述门体内表面的顶部设置有用于在开门时收集门体内表面残留水的接水槽。本发明在洗碗机程序结束后的上悬式开门过程中,残留在门体内表面上的水会被收集在门体顶部的接水槽中,门体内表面的水滴尽可能最少量的滴落至机体的顶部或背部,关门时还可以将门体顶部接水槽收集的水再导流回清洗室内,门体底部也不会出现滴水现象,极大地满足了用户的使用要