
一种传动机构转台的调试方法.pdf

努力****幻翠


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种传动机构转台的调试方法.pdf
本发明提出一种传动机构转台的调试方法,控制系统包括:电控柜、与电控柜电连接的伺服电机、减速器、蜗轮蜗杆、Parker驱动器、DSP运动控制器和上位机,DSP运动控制器与上位机通讯;伺服电机通过减速器和涡轮蜗杆带动运动轴;DSP运动控制器与Parker驱动器电连接,Parker驱动器与伺服电机电连接;运动轴上设置有旋转变压器和光电编码器,Parker驱动器与旋转变压器电连接,并通过对转动惯量参数和速度环参数的设置对伺服电机进行电流环和速度环控制,DSP运动控制器与光电编码器电连接,并通过对位置环和前馈参数的

一种带有内藏式传动机构的旋转台.pdf
本发明涉及海绵切割装置领域,具体涉及一种带有内藏式传动机构的旋转台。它包括内藏式传动机构、机架、旋转机构、移动机架,机架上端装有两排轨道,轨道内装有齿条,移动机架是长方形框架,移动机架装下端四角分别装有齿轮机构,齿轮机构的齿轮啮合装在齿条上面,移动机架上端装有旋转机构,旋转机构上面装有内藏式传送机构。优点是设计简单巧妙,结构合理紧凑,采用内藏式传动机构,电机内藏,占有空间小,轨道上采用齿轮机构,齿轮与齿条结合,无间隙,刚性好,工作台工作顺畅,采用同步皮带旋转,大大提高工作效率。
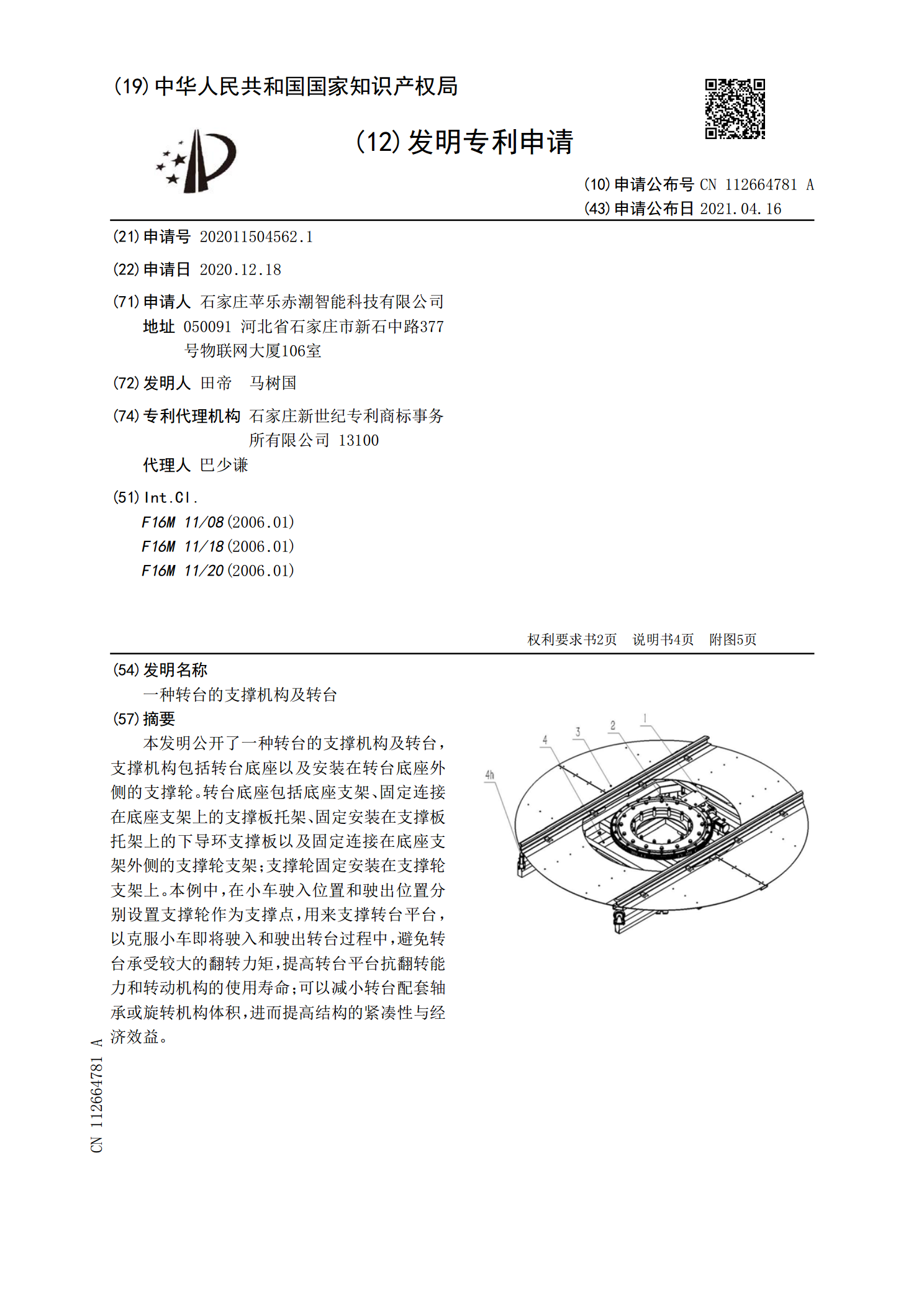
一种转台的支撑机构及转台.pdf
本发明公开了一种转台的支撑机构及转台,支撑机构包括转台底座以及安装在转台底座外侧的支撑轮。转台底座包括底座支架、固定连接在底座支架上的支撑板托架、固定安装在支撑板托架上的下导环支撑板以及固定连接在底座支架外侧的支撑轮支架;支撑轮固定安装在支撑轮支架上。本例中,在小车驶入位置和驶出位置分别设置支撑轮作为支撑点,用来支撑转台平台,以克服小车即将驶入和驶出转台过程中,避免转台承受较大的翻转力矩,提高转台平台抗翻转能力和转动机构的使用寿命;可以减小转台配套轴承或旋转机构体积,进而提高结构的紧凑性与经济效益。

一种卸荷机构传动式大口径气体静压转台.pdf
本发明公开了一种卸荷机构传动式大口径气体静压转台,包括花岗岩工作台、上静压板、芯轴、下静压板、上多孔质节流器、下多孔质节流器、径向多孔质节流器,花岗岩工作台与上静压板固定,通过芯轴与下静压板连接成“工字型”结构,下静压板与动子连接套筒大端固定,卸荷轴承转子连接轴嵌套在动子连接套筒内,卸荷轴承转子连接轴的底部与大带轮固定,滚珠轴承外圈与大带轮内孔固定,内圈与卸荷轴承安装座固定,卸荷轴承安装座上部与壳体支座固定,大带轮通过皮带与小带轮相连接。本发明中采用卸荷结构加带轮的方式驱动,一方面驱动方式更经济,具有可调
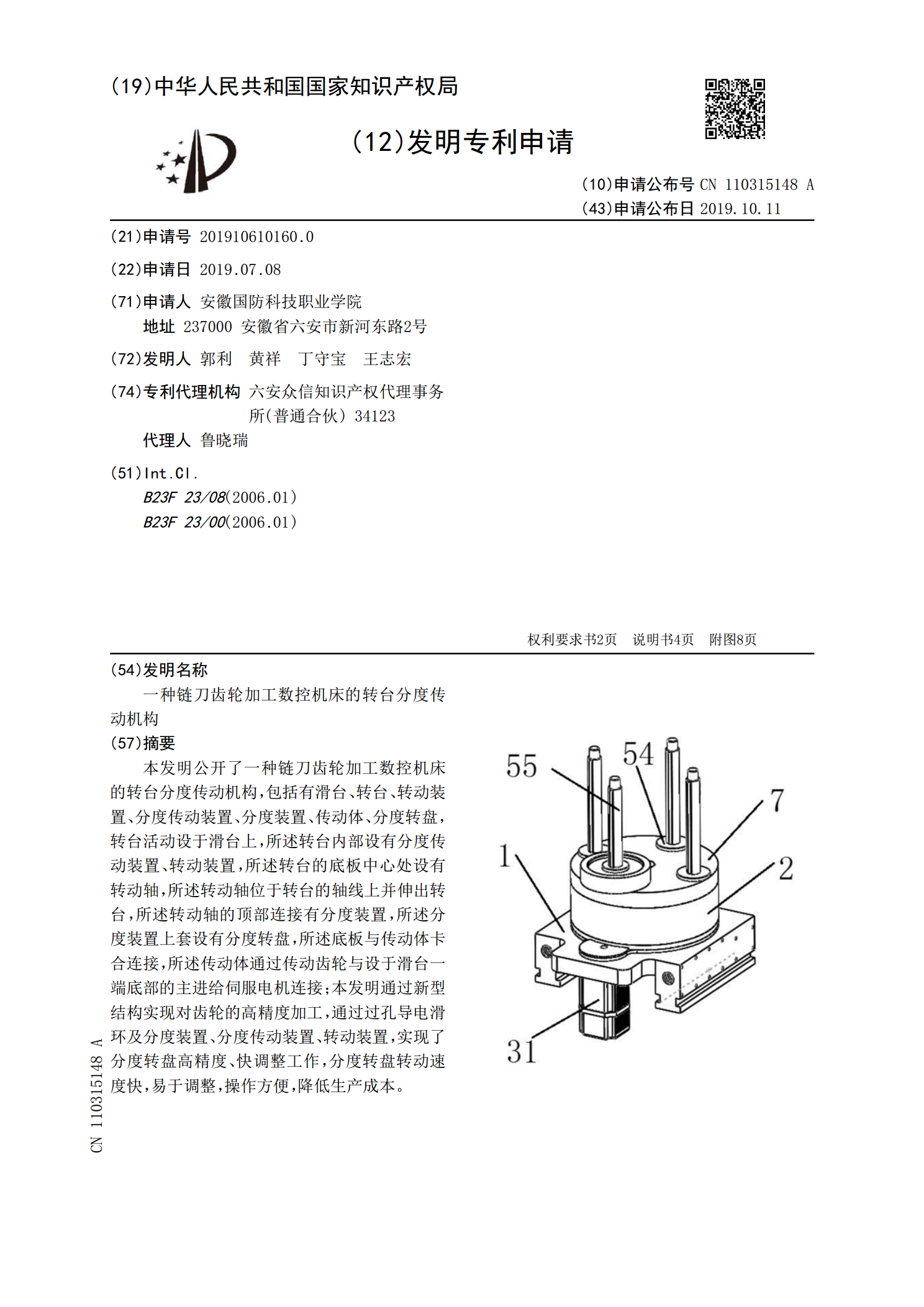
一种链刀齿轮加工数控机床的转台分度传动机构.pdf
本发明公开了一种链刀齿轮加工数控机床的转台分度传动机构,包括有滑台、转台、转动装置、分度传动装置、分度装置、传动体、分度转盘,转台活动设于滑台上,所述转台内部设有分度传动装置、转动装置,所述转台的底板中心处设有转动轴,所述转动轴位于转台的轴线上并伸出转台,所述转动轴的顶部连接有分度装置,所述分度装置上套设有分度转盘,所述底板与传动体卡合连接,所述传动体通过传动齿轮与设于滑台一端底部的主进给伺服电机连接;本发明通过新型结构实现对齿轮的高精度加工,通过过孔导电滑环及分度装置、分度传动装置、转动装置,实现了分度