
3D打印机皮带松紧调节装置.pdf

一吃****书竹

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
3D打印机皮带松紧调节装置.pdf
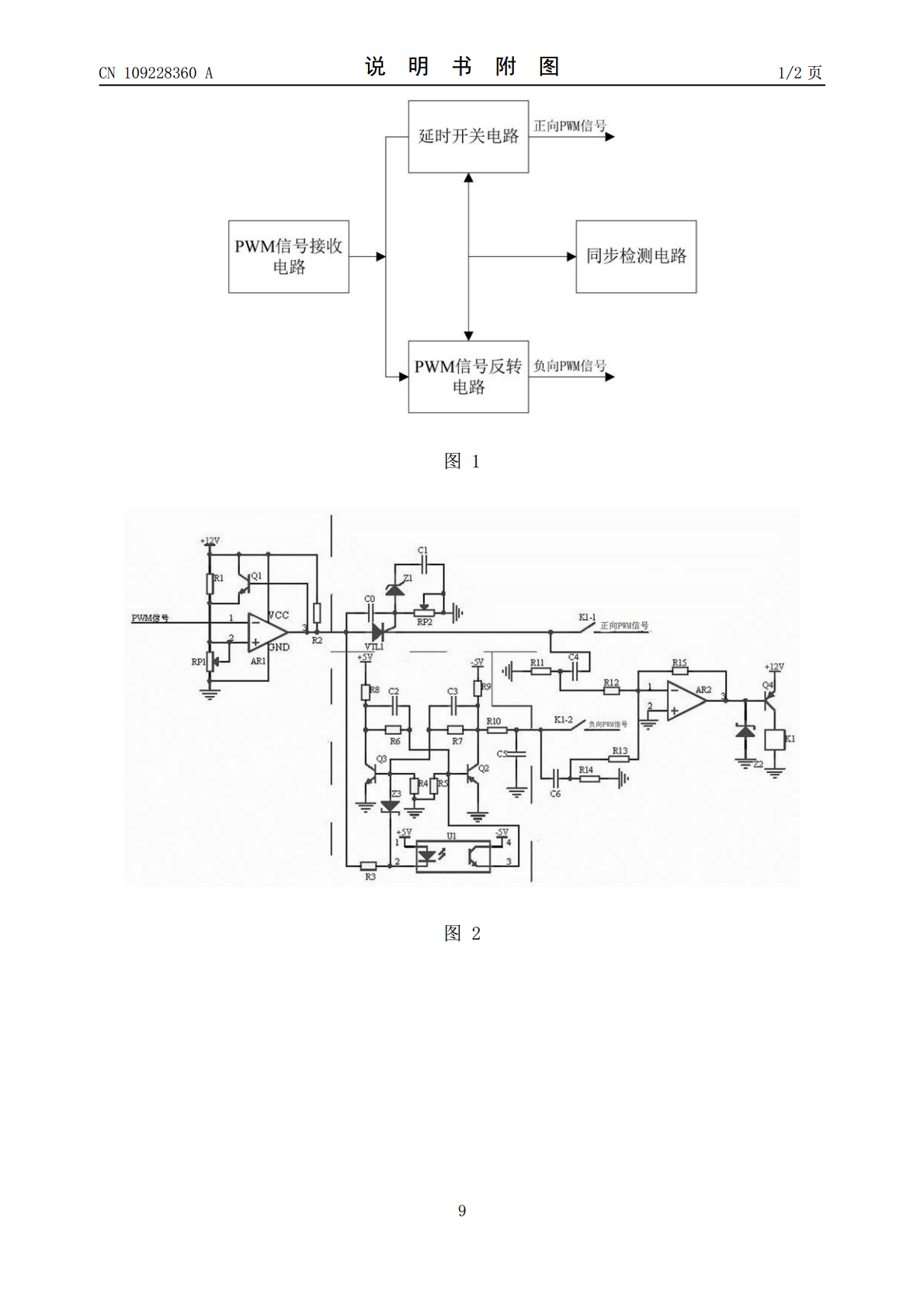
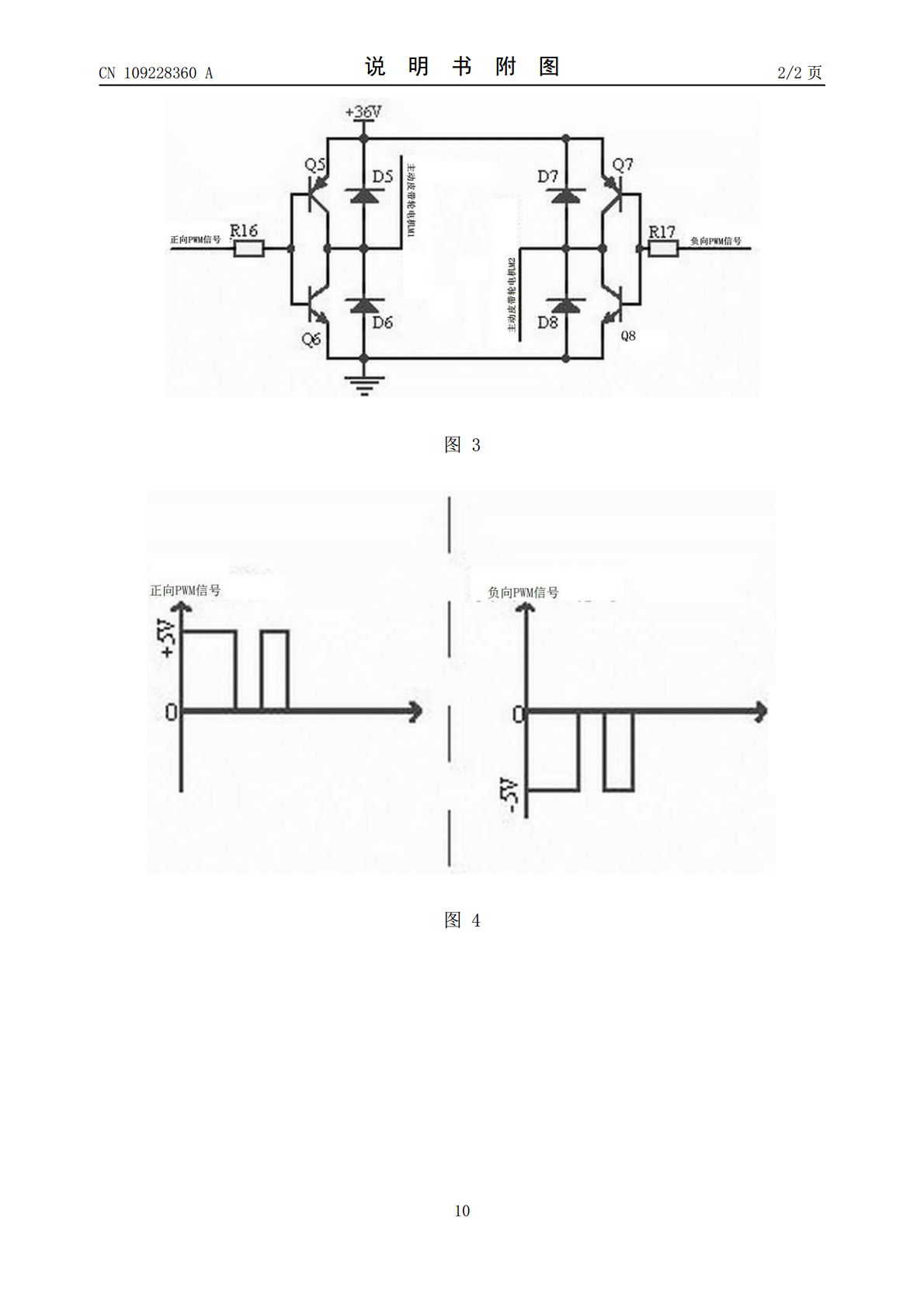
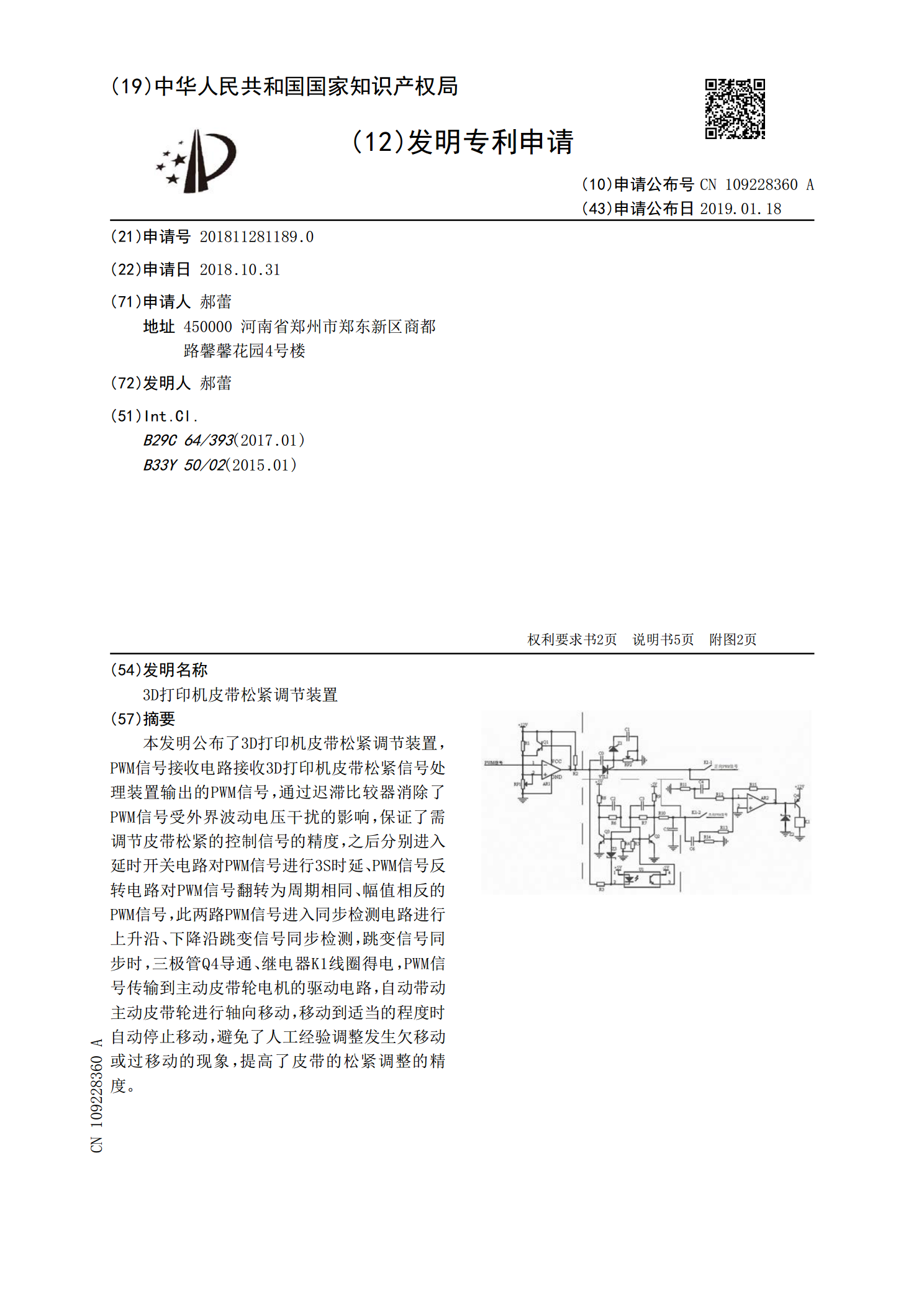
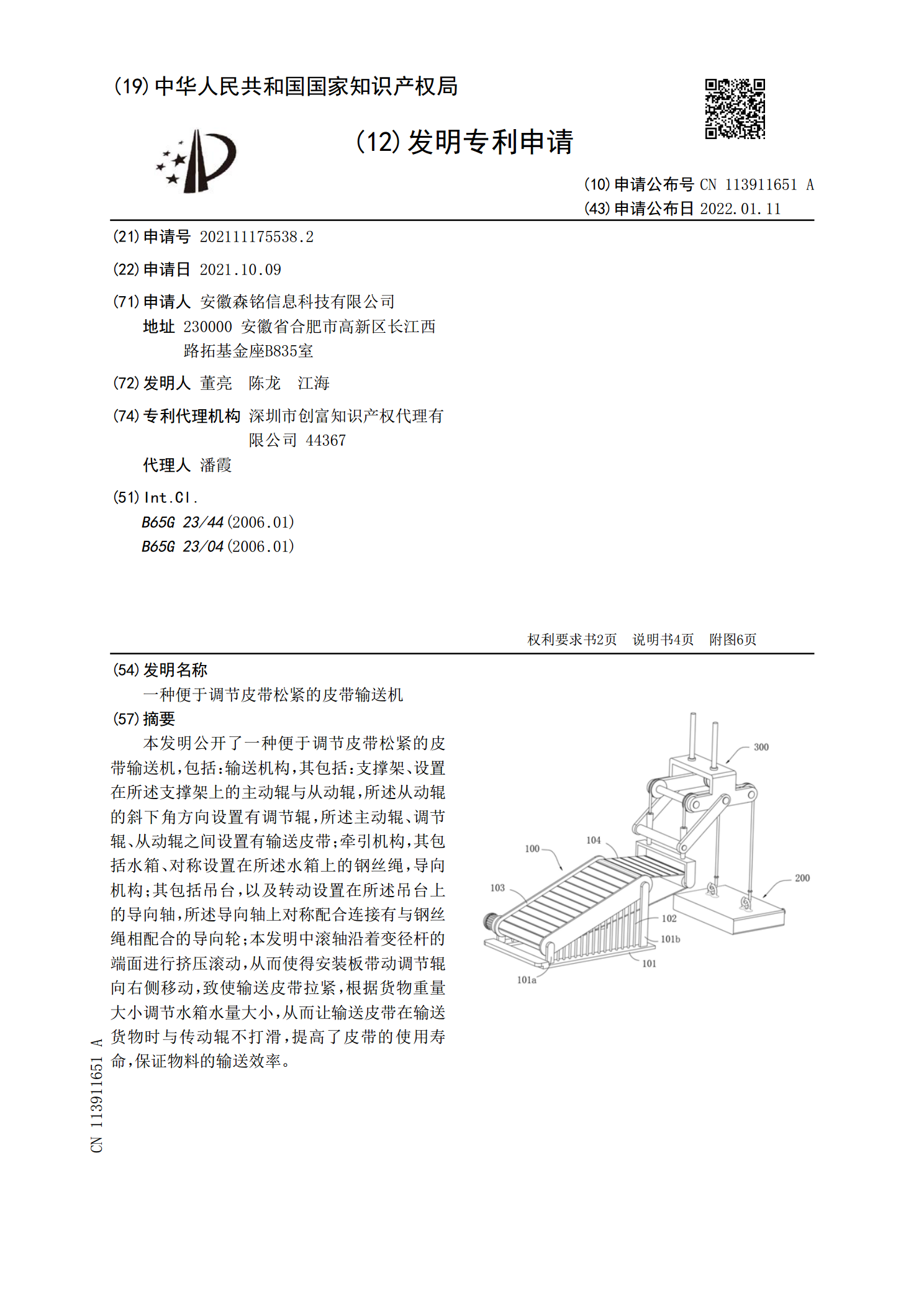
本发明公布了3D打印机皮带松紧调节装置,PWM信号接收电路接收3D打印机皮带松紧信号处理装置输出的PWM信号,通过迟滞比较器消除了PWM信号受外界波动电压干扰的影响,保证了需调节皮带松紧的控制信号的精度,之后分别进入延时开关电路对PWM信号进行3S时延、PWM信号反转电路对PWM信号翻转为周期相同、幅值相反的PWM信号,此两路PWM信号进入同步检测电路进行上升沿、下降沿跳变信号同步检测,跳变信号同步时,三极管Q4导通、继电器K1线圈得电,PWM信号传输到主动皮带轮电机的驱动电路,自动带动主动皮带轮进行轴向

抽油机电动机皮带松紧自动调节装置.pdf
本发明是抽油机电动机皮带松紧自动调节装置,可自动移动调节各型抽油机的电动机与皮带之间的松紧度,也可用于其它使用场所中各种大型电动机皮带的自动移动和调节。抽油机电动机皮带松紧自动调节装置包括支架、导轨、导轨滑套、电机固定座和调节螺杆,导轨滑套装于导轨外面,支架固定在导轨的两端,电机固定座固定在导轨滑套上面,螺母固定在电机固定座的下端面与安装于支架中的调节螺杆的外螺纹螺纹连接。调节电机和红外线接近开关均通过电缆与数据传输控制柜连接,调节电机的输出轴与调节螺杆啮合;数据传输控制柜的电缆与地面电气控制柜连接、其数
一种便于调节皮带松紧的皮带输送机.pdf
本发明公开了一种便于调节皮带松紧的皮带输送机,包括:输送机构,其包括:支撑架、设置在所述支撑架上的主动辊与从动辊,所述从动辊的斜下角方向设置有调节辊,所述主动辊、调节辊、从动辊之间设置有输送皮带;牵引机构,其包括水箱、对称设置在所述水箱上的钢丝绳,导向机构;其包括吊台,以及转动设置在所述吊台上的导向轴,所述导向轴上对称配合连接有与钢丝绳相配合的导向轮;本发明中滚轴沿着变径杆的端面进行挤压滚动,从而使得安装板带动调节辊向右侧移动,致使输送皮带拉紧,根据货物重量大小调节水箱水量大小,从而让输送皮带在输送货物时
一种3D打印机用调节装置.pdf
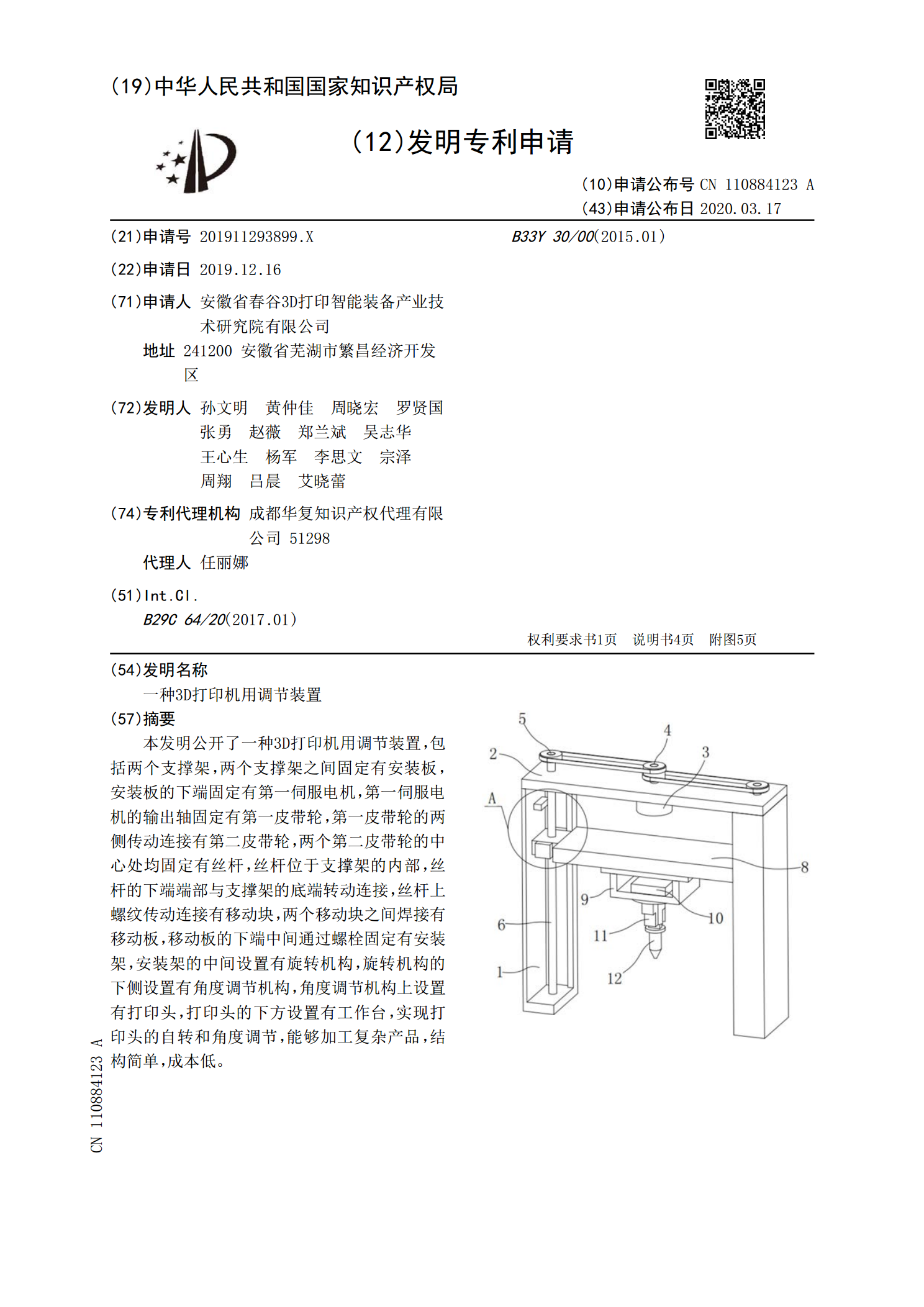
本发明公开了一种3D打印机用调节装置,包括两个支撑架,两个支撑架之间固定有安装板,安装板的下端固定有第一伺服电机,第一伺服电机的输出轴固定有第一皮带轮,第一皮带轮的两侧传动连接有第二皮带轮,两个第二皮带轮的中心处均固定有丝杆,丝杆位于支撑架的内部,丝杆的下端端部与支撑架的底端转动连接,丝杆上螺纹传动连接有移动块,两个移动块之间焊接有移动板,移动板的下端中间通过螺栓固定有安装架,安装架的中间设置有旋转机构,旋转机构的下侧设置有角度调节机构,角度调节机构上设置有打印头,打印头的下方设置有工作台,实现打印头的自
一种3D打印机的平衡调节装置.pdf
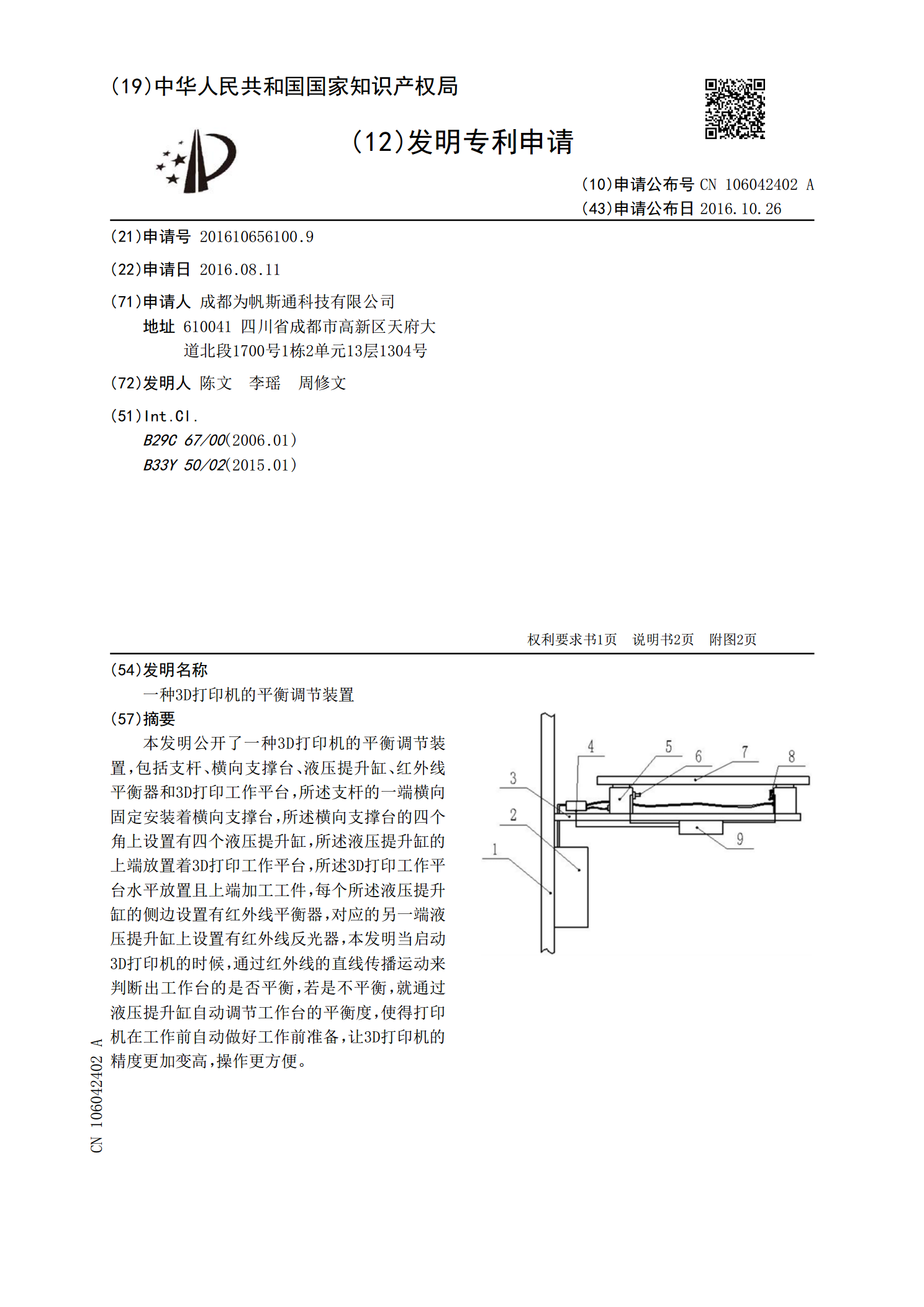
本发明公开了一种3D打印机的平衡调节装置,包括支杆、横向支撑台、液压提升缸、红外线平衡器和3D打印工作平台,所述支杆的一端横向固定安装着横向支撑台,所述横向支撑台的四个角上设置有四个液压提升缸,所述液压提升缸的上端放置着3D打印工作平台,所述3D打印工作平台水平放置且上端加工工件,每个所述液压提升缸的侧边设置有红外线平衡器,对应的另一端液压提升缸上设置有红外线反光器,本发明当启动3D打印机的时候,通过红外线的直线传播运动来判断出工作台的是否平衡,若是不平衡,就通过液压提升缸自动调节工作台的平衡度,使得打印