
基于机器视觉的番茄图像匹配算法研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于机器视觉的番茄图像匹配算法研究的中期报告.docx
基于机器视觉的番茄图像匹配算法研究的中期报告1.研究背景在农业生产中,番茄是一种重要的蔬菜作物,而番茄品种繁多,形态特征各异,繁殖方式也不同,这对于番茄种植的管理和品种的鉴定都带来了很大的挑战。基于机器视觉技术的番茄图像匹配算法,能够快速准确地对番茄进行鉴定和分类,提高农业生产的效率和质量。2.研究内容本项目旨在设计一种基于机器视觉的番茄图像匹配算法,主要包括以下研究内容:2.1数据集的构建根据不同品种的番茄拍摄多张图像,对图像进行预处理,包括背景去除、图像增强、特征提取等步骤,构建出包含多个品种的番茄图
一种基于机器视觉的图像匹配算法.pdf
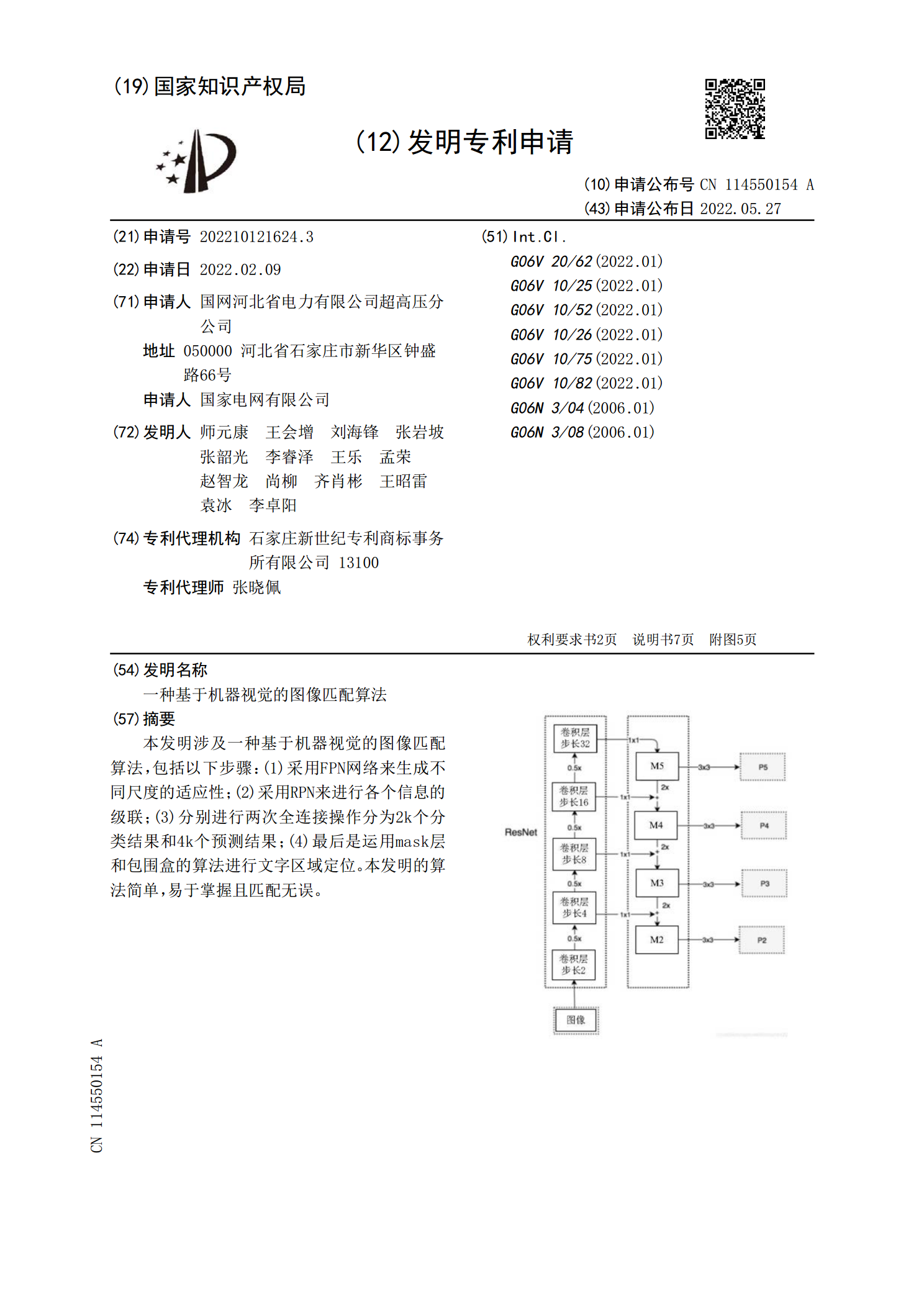
本发明涉及一种基于机器视觉的图像匹配算法,包括以下步骤:(1)采用FPN网络来生成不同尺度的适应性;(2)采用RPN来进行各个信息的级联;(3)分别进行两次全连接操作分为2k个分类结果和4k个预测结果;(4)最后是运用mask层和包围盒的算法进行文字区域定位。本发明的算法简单,易于掌握且匹配无误。

基于机器人视觉图像的路径规划算法研究的中期报告.docx
基于机器人视觉图像的路径规划算法研究的中期报告一、研究背景机器人视觉图像处理技术在路径规划领域中的应用越来越广泛。如何利用机器人视觉图像识别目标物体及其形状、尺寸、颜色等特征,进而确定机器人的行进方向和路径规划,是实现机器人自主感知、自主决策、自主行动的关键技术之一。二、研究目的本研究旨在设计一种基于机器人视觉图像的路径规划算法,提高机器人在实际工作中的自主控制和精度。三、研究内容1.目标物体识别算法的研究机器人视觉图像处理技术与目标物体识别算法密切相关。本研究将从目标物体的形状、尺寸、颜色等方面入手,研

基于图像分割的立体匹配算法研究的中期报告.docx
基于图像分割的立体匹配算法研究的中期报告1.研究背景及意义立体匹配是计算机视觉领域的重要研究方向。它可以从两幅不同视角拍摄的图像中获取物体的深度信息,实现图像三维重建、虚拟现实等应用。目前,立体匹配算法主要分为基于特征点、基于能量函数和基于深度学习的方法。其中,基于能量函数的方法可以利用图像分割技术提高立体匹配的精度和稳定性,因此在实际应用中具有广泛的应用前景。本研究旨在对基于图像分割的立体匹配算法进行研究,提高立体匹配的精度和鲁棒性,为图像三维重建等应用提供支撑。2.研究内容和方法本研究将基于能量函数的

基于双目视觉的立体匹配算法研究的中期报告.docx
基于双目视觉的立体匹配算法研究的中期报告1.研究背景和意义立体匹配是计算机视觉中的一个重要问题,在机器人、三维重建、人脸识别等领域都有广泛的应用。通过对两个或多个图像中对应点的匹配,可以实现深度、距离、立体视觉等信息的获取,从而实现更精确的图像处理和分析。而双目视觉将两个摄像头分别放置在不同的位置上拍摄同一场景,可以获得两个视角的图像,因此能够更好地解决立体匹配中出现的遮挡、纹理变化、光照等问题。因此,本课题的研究意义在于基于双目视觉的立体匹配算法的研究和优化,以提高匹配精度和实用性,推进计算机视觉领域的