
一种小儿骨科牵引装置.pdf

雨巷****碧易

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种小儿骨科牵引装置.pdf
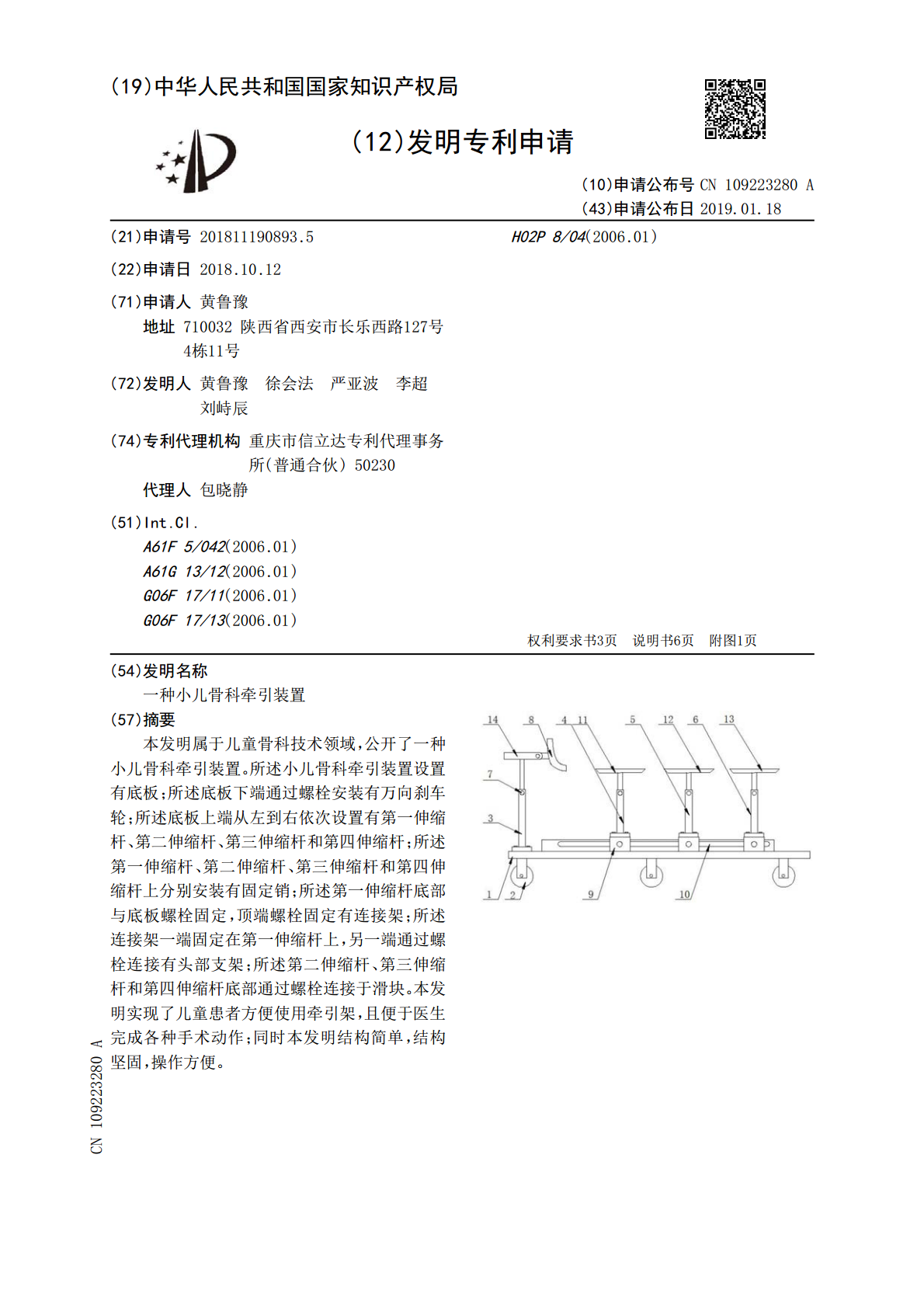
本发明属于儿童骨科技术领域,公开了一种小儿骨科牵引装置。所述小儿骨科牵引装置设置有底板;所述底板下端通过螺栓安装有万向刹车轮;所述底板上端从左到右依次设置有第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆;所述第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆上分别安装有固定销;所述第一伸缩杆底部与底板螺栓固定,顶端螺栓固定有连接架;所述连接架一端固定在第一伸缩杆上,另一端通过螺栓连接有头部支架;所述第二伸缩杆、第三伸缩杆和第四伸缩杆底部通过螺栓连接于滑块。本发明实现了儿童患者方便使用牵引架,且便于医生完成各种
一种小儿骨科牵引架.pdf
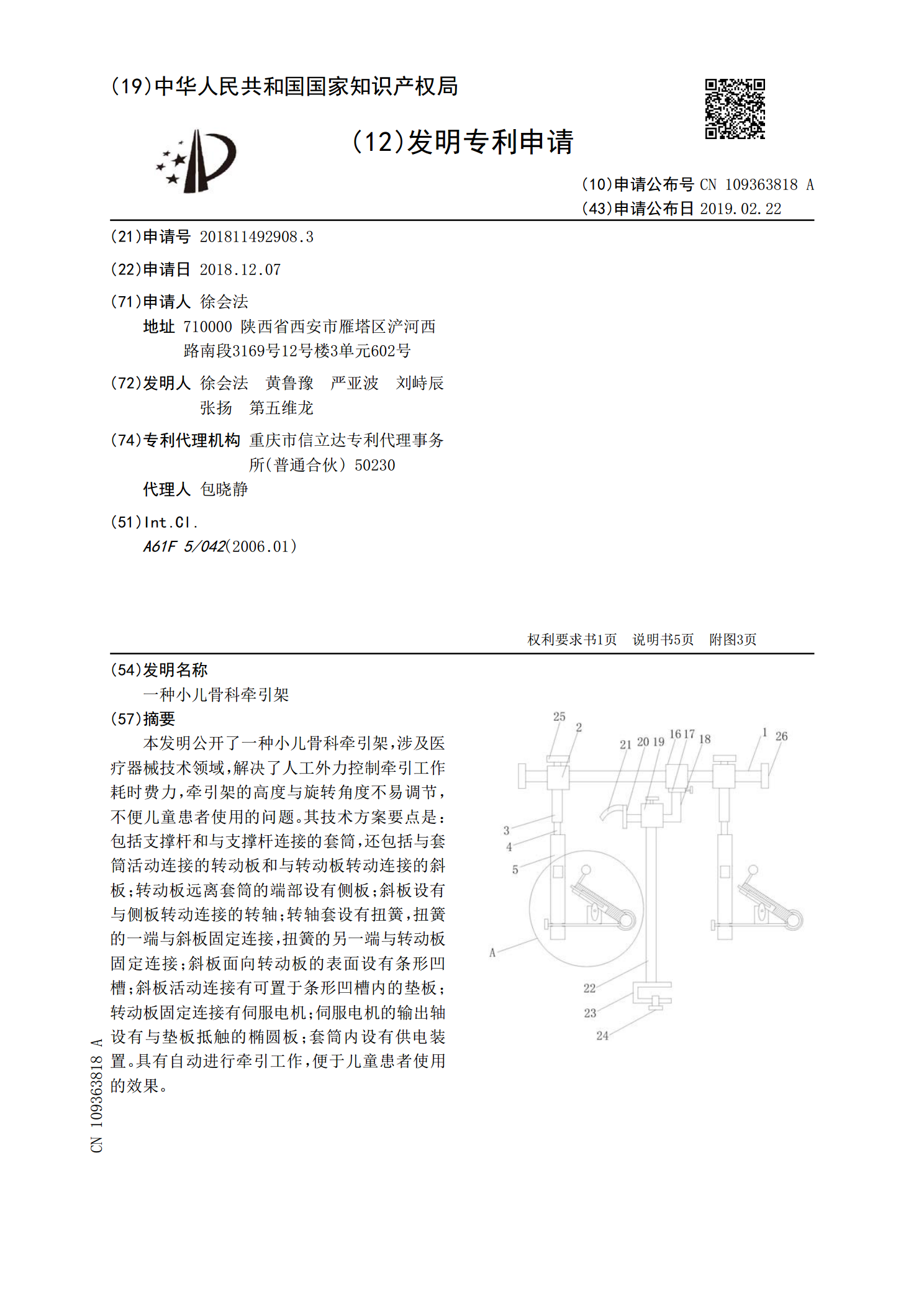
本发明公开了一种小儿骨科牵引架,涉及医疗器械技术领域,解决了人工外力控制牵引工作耗时费力,牵引架的高度与旋转角度不易调节,不便儿童患者使用的问题。其技术方案要点是:包括支撑杆和与支撑杆连接的套筒,还包括与套筒活动连接的转动板和与转动板转动连接的斜板;转动板远离套筒的端部设有侧板;斜板设有与侧板转动连接的转轴;转轴套设有扭簧,扭簧的一端与斜板固定连接,扭簧的另一端与转动板固定连接;斜板面向转动板的表面设有条形凹槽;斜板活动连接有可置于条形凹槽内的垫板;转动板固定连接有伺服电机;伺服电机的输出轴设有与垫板抵触
一种医疗骨科用的骨科牵引装置.pdf
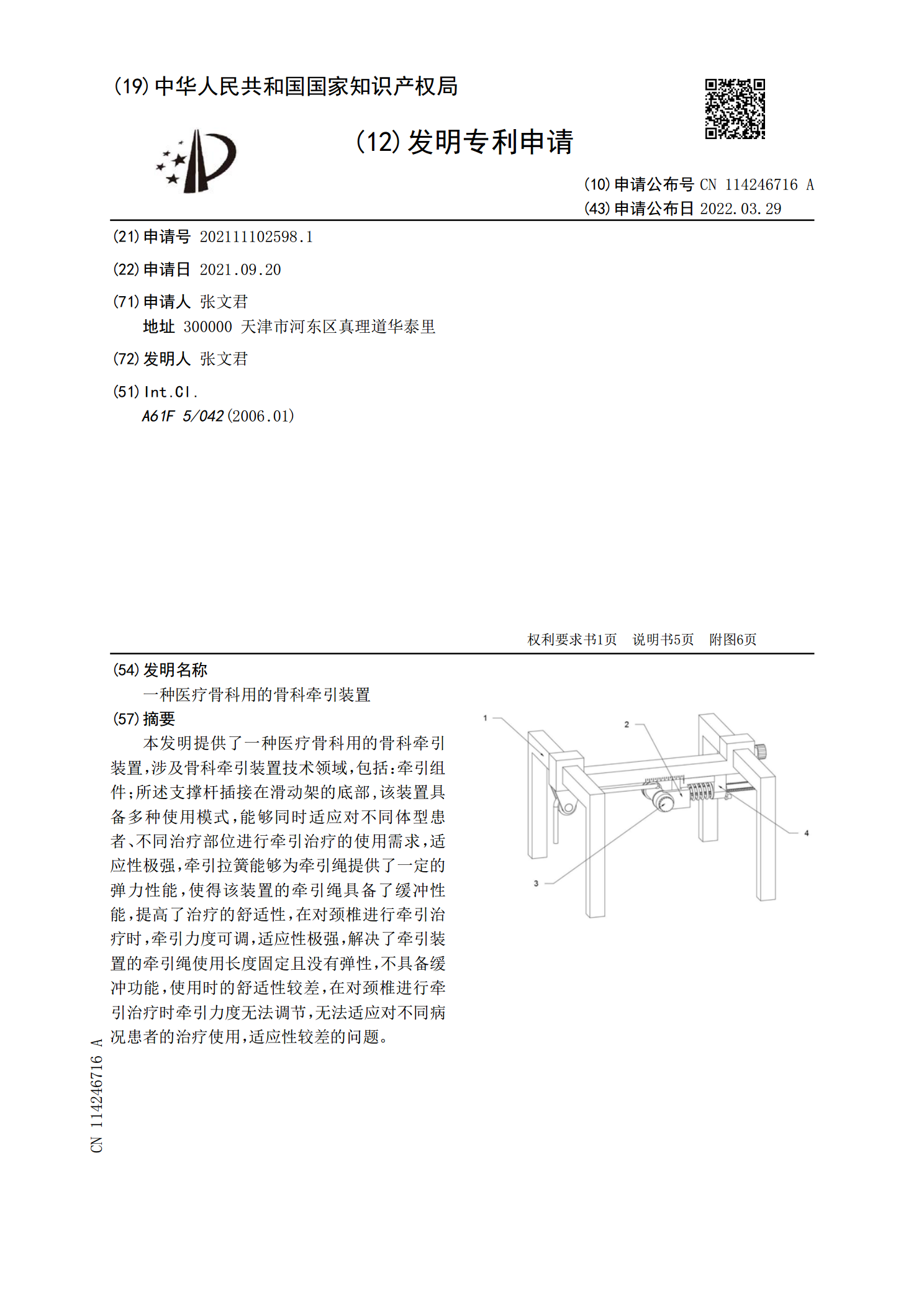
本发明提供了一种医疗骨科用的骨科牵引装置,涉及骨科牵引装置技术领域,包括:牵引组件;所述支撑杆插接在滑动架的底部,该装置具备多种使用模式,能够同时适应对不同体型患者、不同治疗部位进行牵引治疗的使用需求,适应性极强,牵引拉簧能够为牵引绳提供了一定的弹力性能,使得该装置的牵引绳具备了缓冲性能,提高了治疗的舒适性,在对颈椎进行牵引治疗时,牵引力度可调,适应性极强,解决了牵引装置的牵引绳使用长度固定且没有弹性,不具备缓冲功能,使用时的舒适性较差,在对颈椎进行牵引治疗时牵引力度无法调节,无法适应对不同病况患者的治疗
一种骨科牵引训练装置.pdf
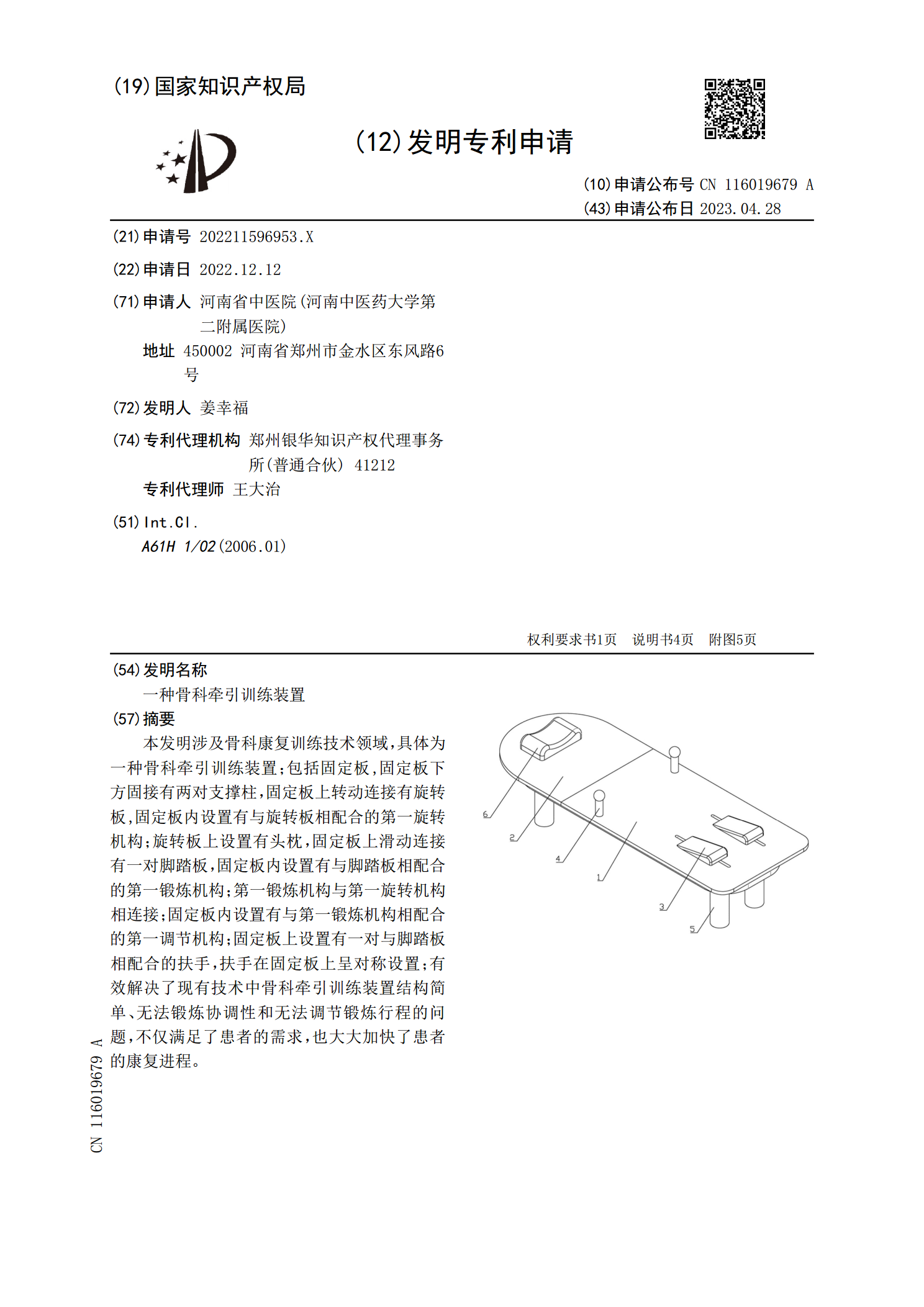
本发明涉及骨科康复训练技术领域,具体为一种骨科牵引训练装置;包括固定板,固定板下方固接有两对支撑柱,固定板上转动连接有旋转板,固定板内设置有与旋转板相配合的第一旋转机构;旋转板上设置有头枕,固定板上滑动连接有一对脚踏板,固定板内设置有与脚踏板相配合的第一锻炼机构;第一锻炼机构与第一旋转机构相连接;固定板内设置有与第一锻炼机构相配合的第一调节机构;固定板上设置有一对与脚踏板相配合的扶手,扶手在固定板上呈对称设置;有效解决了现有技术中骨科牵引训练装置结构简单、无法锻炼协调性和无法调节锻炼行程的问题,不仅满足了
一种骨科机械牵引装置.pdf
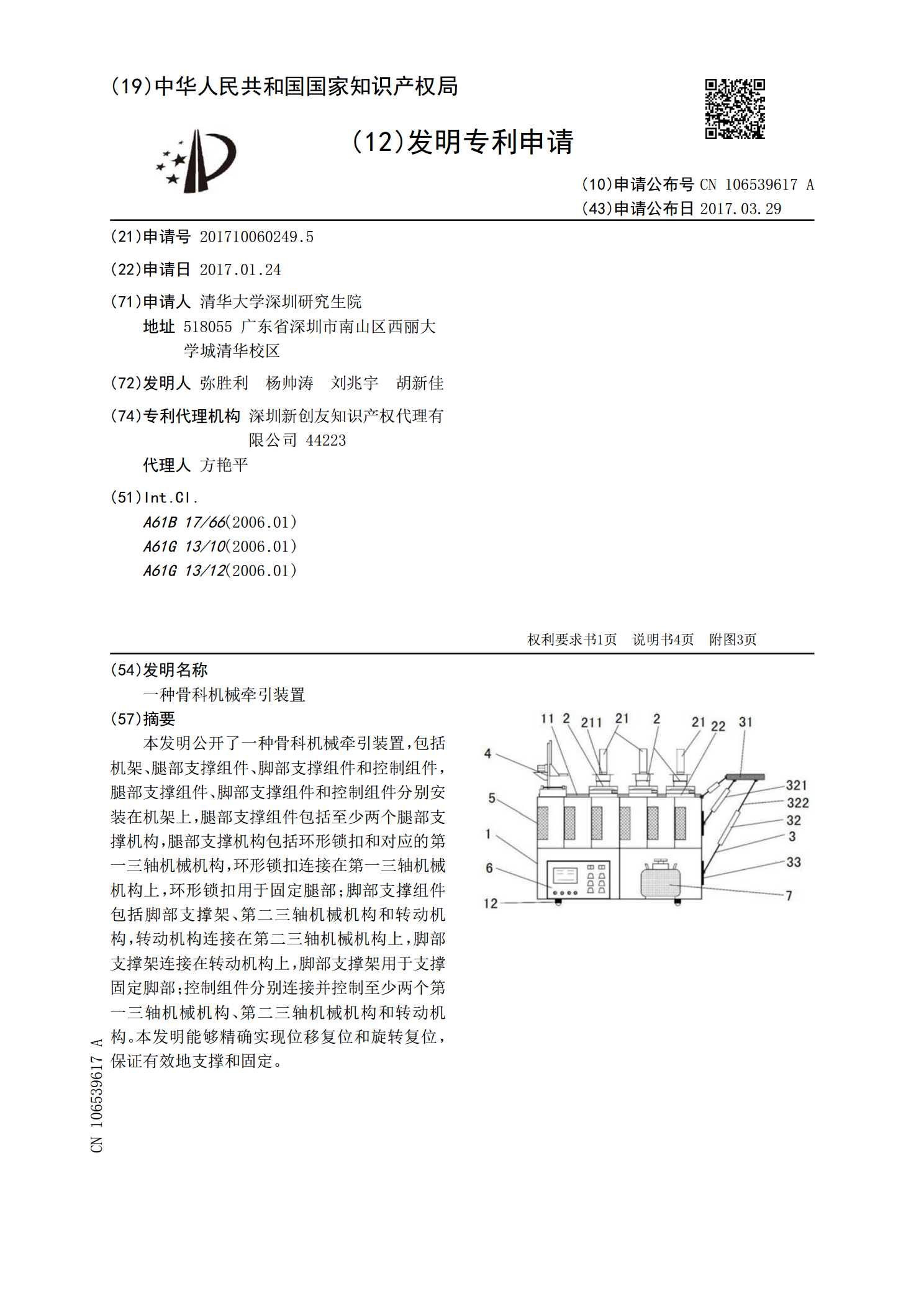
本发明公开了一种骨科机械牵引装置,包括机架、腿部支撑组件、脚部支撑组件和控制组件,腿部支撑组件、脚部支撑组件和控制组件分别安装在机架上,腿部支撑组件包括至少两个腿部支撑机构,腿部支撑机构包括环形锁扣和对应的第一三轴机械机构,环形锁扣连接在第一三轴机械机构上,环形锁扣用于固定腿部;脚部支撑组件包括脚部支撑架、第二三轴机械机构和转动机构,转动机构连接在第二三轴机械机构上,脚部支撑架连接在转动机构上,脚部支撑架用于支撑固定脚部;控制组件分别连接并控制至少两个第一三轴机械机构、第二三轴机械机构和转动机构。本发明能