
一种空化射流清洗设备及清洗方法.pdf

一吃****春艳

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种空化射流清洗设备及清洗方法.pdf
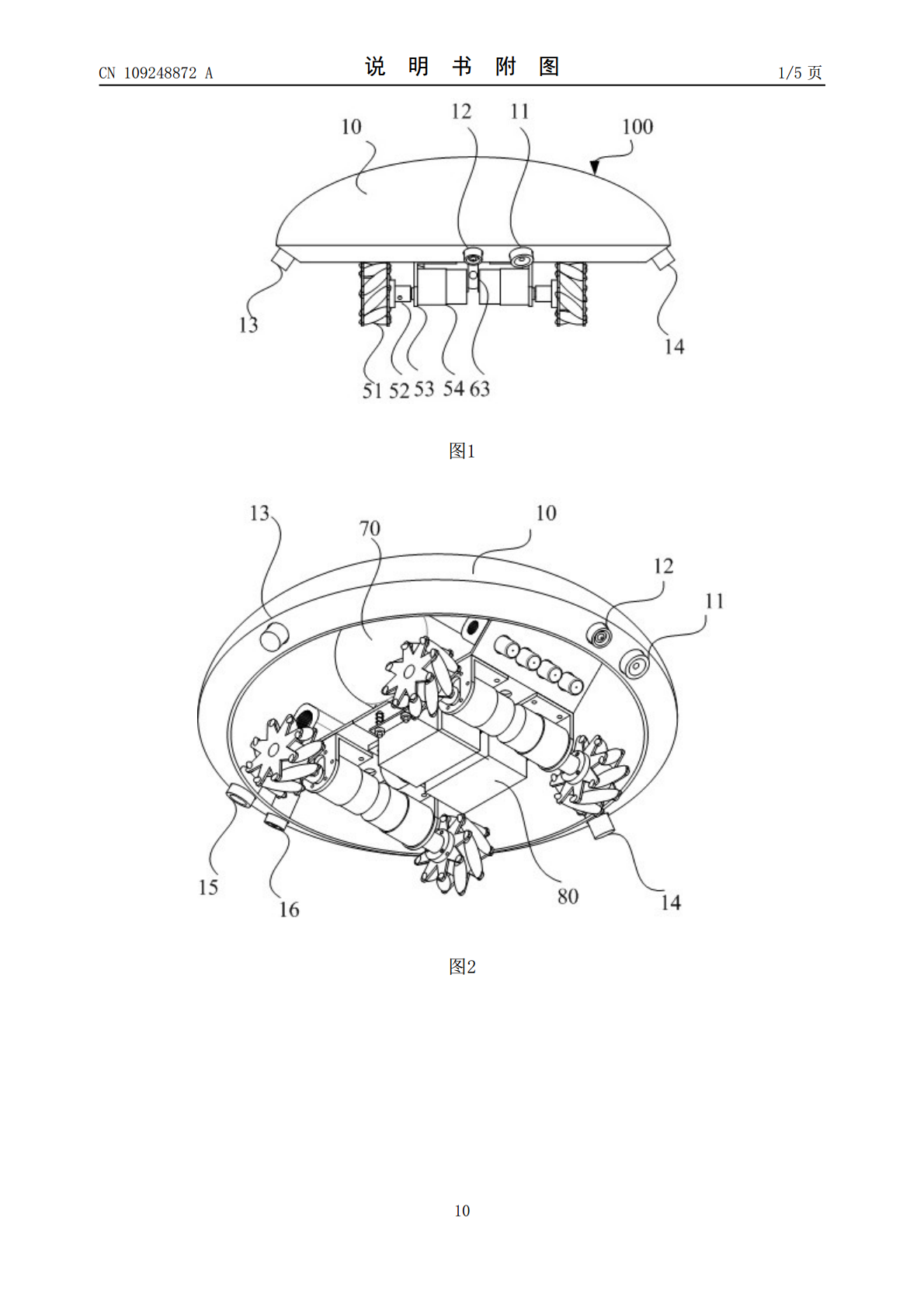
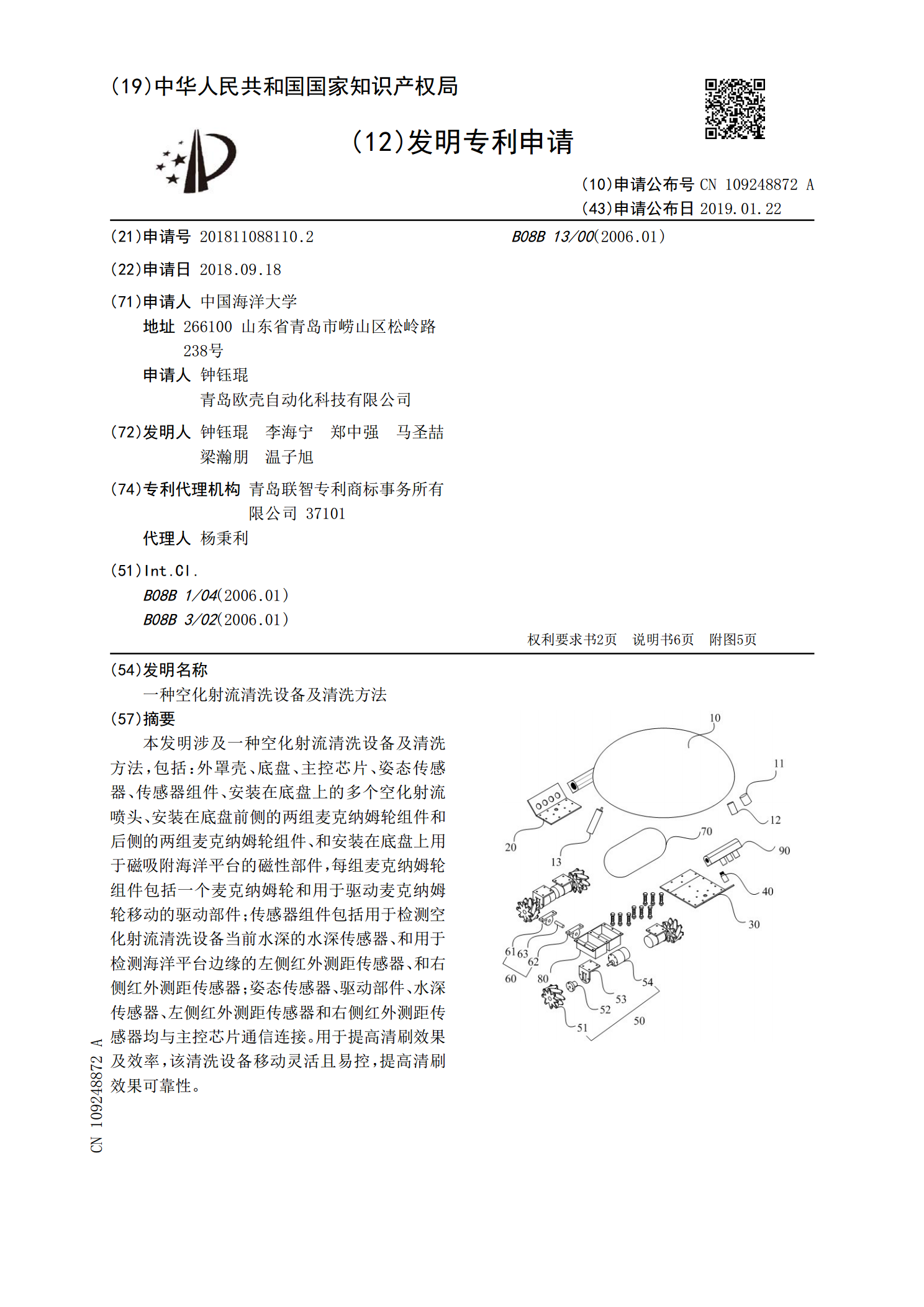
本发明涉及一种空化射流清洗设备及清洗方法,包括:外罩壳、底盘、主控芯片、姿态传感器、传感器组件、安装在底盘上的多个空化射流喷头、安装在底盘前侧的两组麦克纳姆轮组件和后侧的两组麦克纳姆轮组件、和安装在底盘上用于磁吸附海洋平台的磁性部件,每组麦克纳姆轮组件包括一个麦克纳姆轮和用于驱动麦克纳姆轮移动的驱动部件;传感器组件包括用于检测空化射流清洗设备当前水深的水深传感器、和用于检测海洋平台边缘的左侧红外测距传感器、和右侧红外测距传感器;姿态传感器、驱动部件、水深传感器、左侧红外测距传感器和右侧红外测距传感器均与主
空化射流船体清洗报告.doc
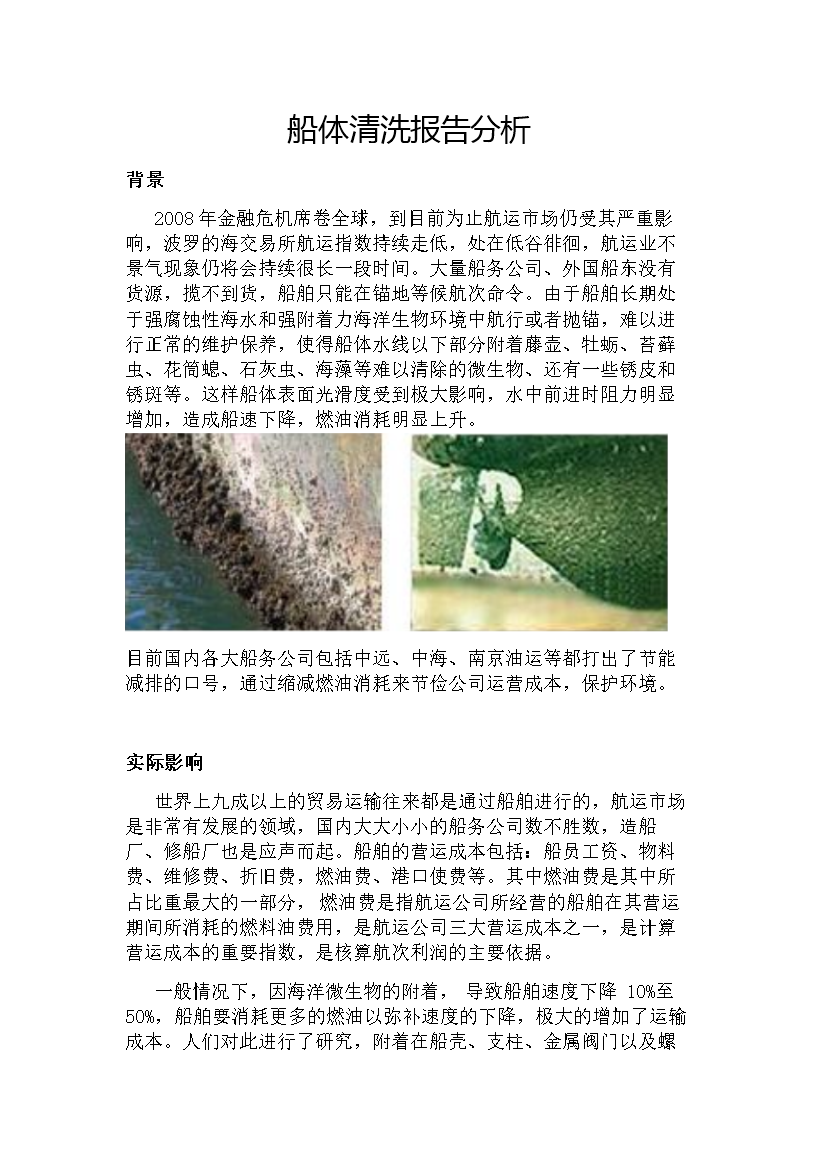
船体清洗报告分析背景2008年金融危机席卷全球到目前为止航运市场仍受其严重影响波罗的海交易所航运指数持续走低处在低谷徘徊航运业不景气现象仍将会持续很长一段时间。大量船务公司、外国船东没有货源揽不到货船舶只能在锚地等候航次命令。由于船舶长期处于强腐蚀性海水和强附着力海洋生物环境中航行或者抛锚难以进行正常的维护保养使得船体水线以下部分附着藤壶、牡蛎、苔藓虫、花筒螅、石灰虫、
空化射流船体清洗报告.doc
船体清洗报告分析背景2008年金融危机席卷全球到目前为止航运市场仍受其严重影响波罗的海交易所航运指数持续走低处在低谷徘徊航运业不景气现象仍将会持续很长一段时间。大量船务公司、外国船东没有货源揽不到货船舶只能在锚地等候航次命令。由于船舶长期处于强腐蚀性海水和强附着力海洋生物环境中航行或者抛锚难以进行正常的维护保养使得船体水线以下部分附着藤壶、牡蛎、苔藓虫、花筒螅、石灰虫、
空化射流船体清洗报告.doc
船体清洗报告分析背景2008年金融危机席卷全球到目前为止航运市场仍受其严重影响波罗的海交易所航运指数持续走低处在低谷徘徊航运业不景气现象仍将会持续很长一段时间。大量船务公司、外国船东没有货源揽不到货船舶只能在锚地等候航次命令。由于船舶长期处于强腐蚀性海水和强附着力海洋生物环境中航行或者抛锚难以进行正常的维护保养使得船体水线以下部分附着藤壶、牡蛎、苔藓虫、花筒螅、石灰虫、
一种空化射流清洗空化器.pdf
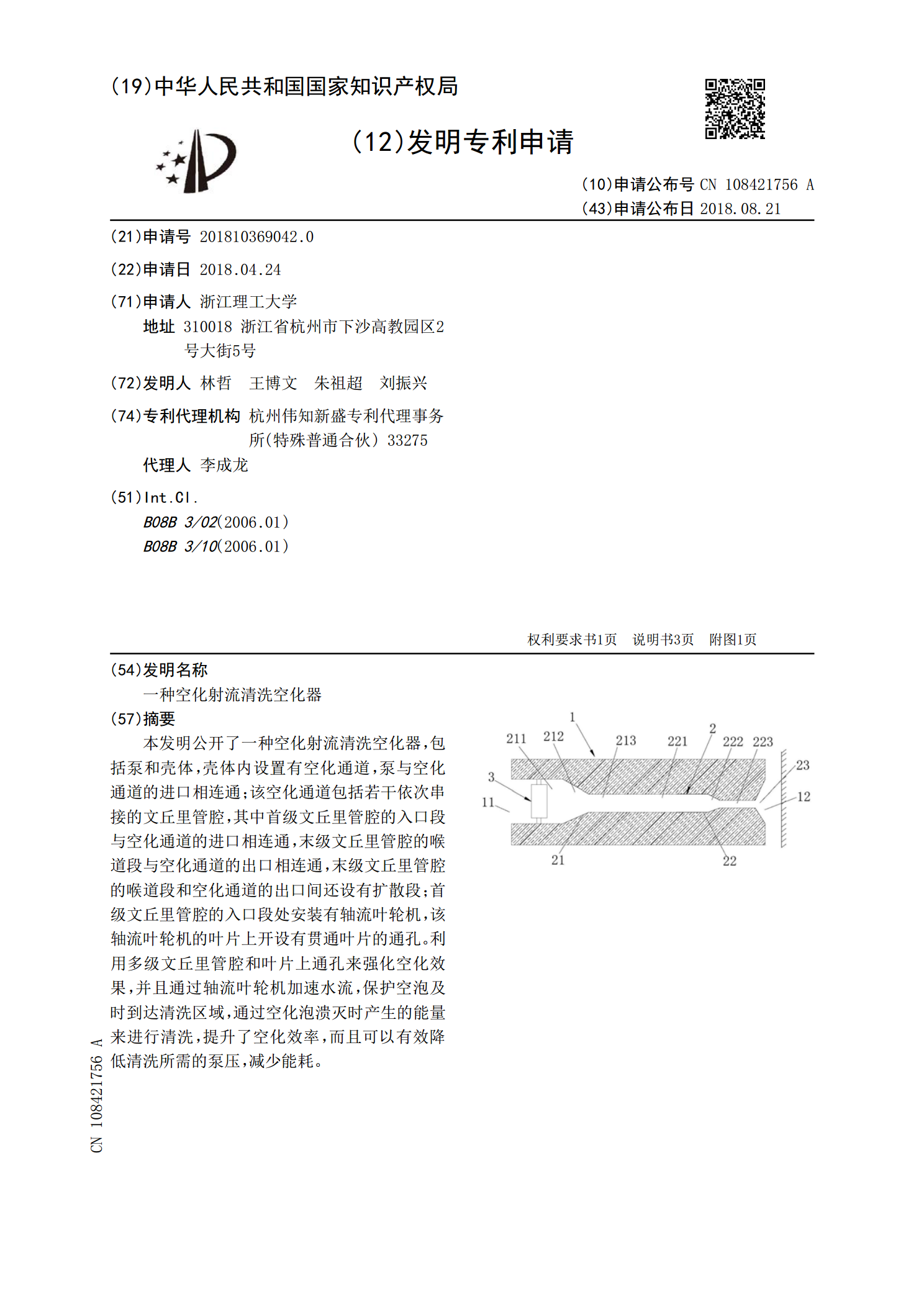
本发明公开了一种空化射流清洗空化器,包括泵和壳体,壳体内设置有空化通道,泵与空化通道的进口相连通;该空化通道包括若干依次串接的文丘里管腔,其中首级文丘里管腔的入口段与空化通道的进口相连通,末级文丘里管腔的喉道段与空化通道的出口相连通,末级文丘里管腔的喉道段和空化通道的出口间还设有扩散段;首级文丘里管腔的入口段处安装有轴流叶轮机,该轴流叶轮机的叶片上开设有贯通叶片的通孔。利用多级文丘里管腔和叶片上通孔来强化空化效果,并且通过轴流叶轮机加速水流,保护空泡及时到达清洗区域,通过空化泡溃灭时产生的能量来进行清洗,