
折臂式起重机.pdf

努力****妙风

1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
折臂式起重机.pdf
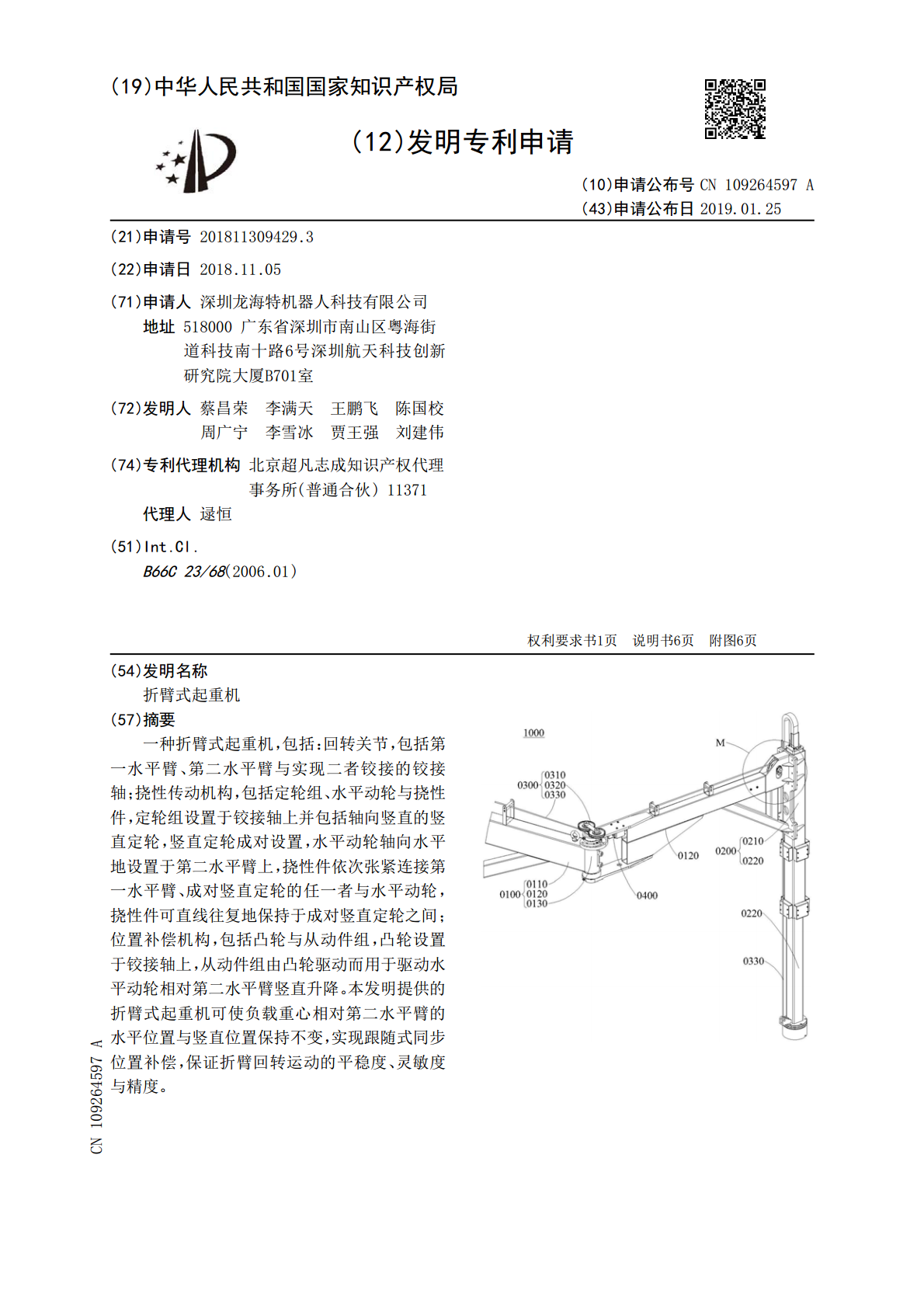
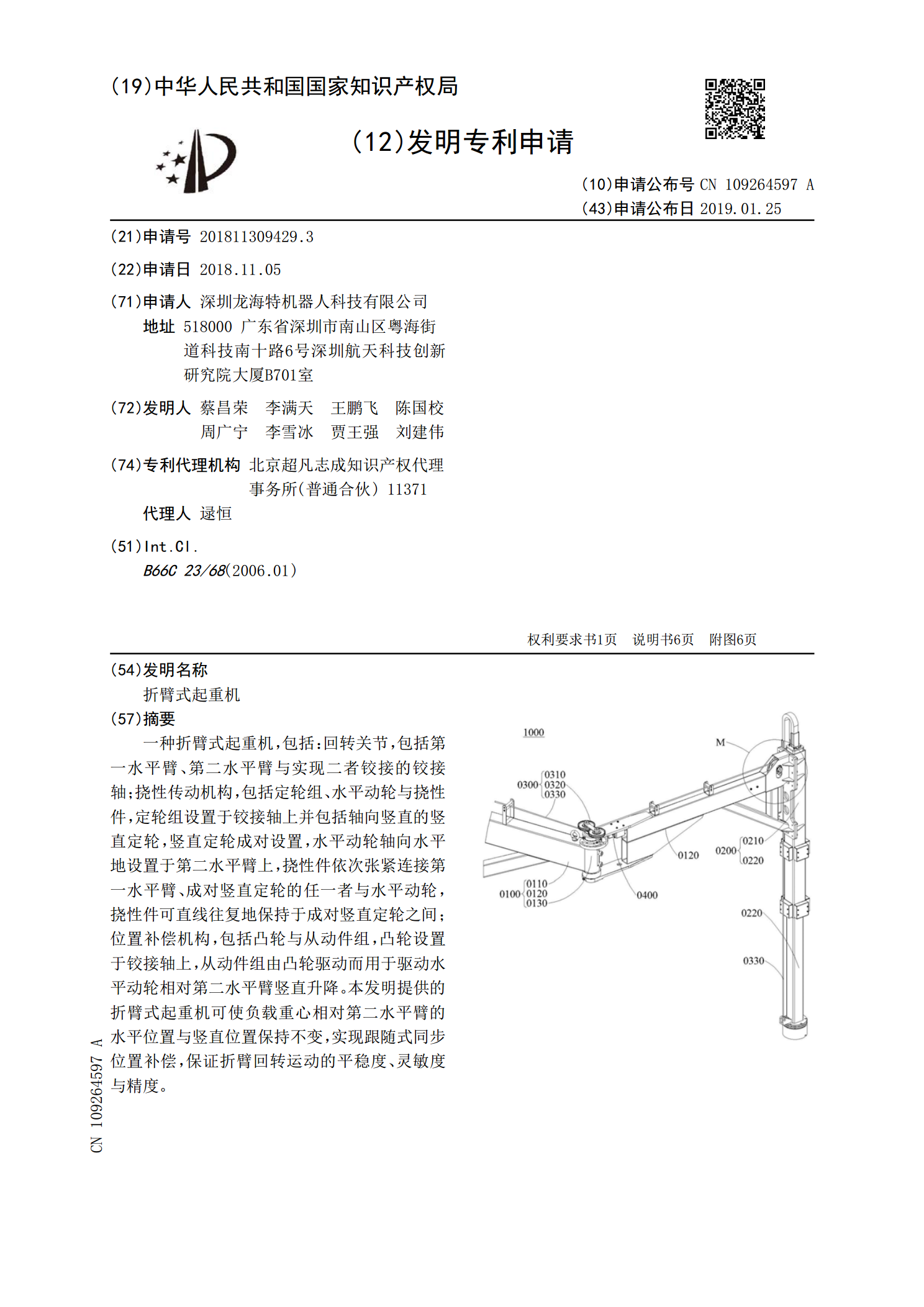
一种折臂式起重机,包括:回转关节,包括第一水平臂、第二水平臂与实现二者铰接的铰接轴;挠性传动机构,包括定轮组、水平动轮与挠性件,定轮组设置于铰接轴上并包括轴向竖直的竖直定轮,竖直定轮成对设置,水平动轮轴向水平地设置于第二水平臂上,挠性件依次张紧连接第一水平臂、成对竖直定轮的任一者与水平动轮,挠性件可直线往复地保持于成对竖直定轮之间;位置补偿机构,包括凸轮与从动件组,凸轮设置于铰接轴上,从动件组由凸轮驱动而用于驱动水平动轮相对第二水平臂竖直升降。本发明提供的折臂式起重机可使负载重心相对第二水平臂的水平位置与
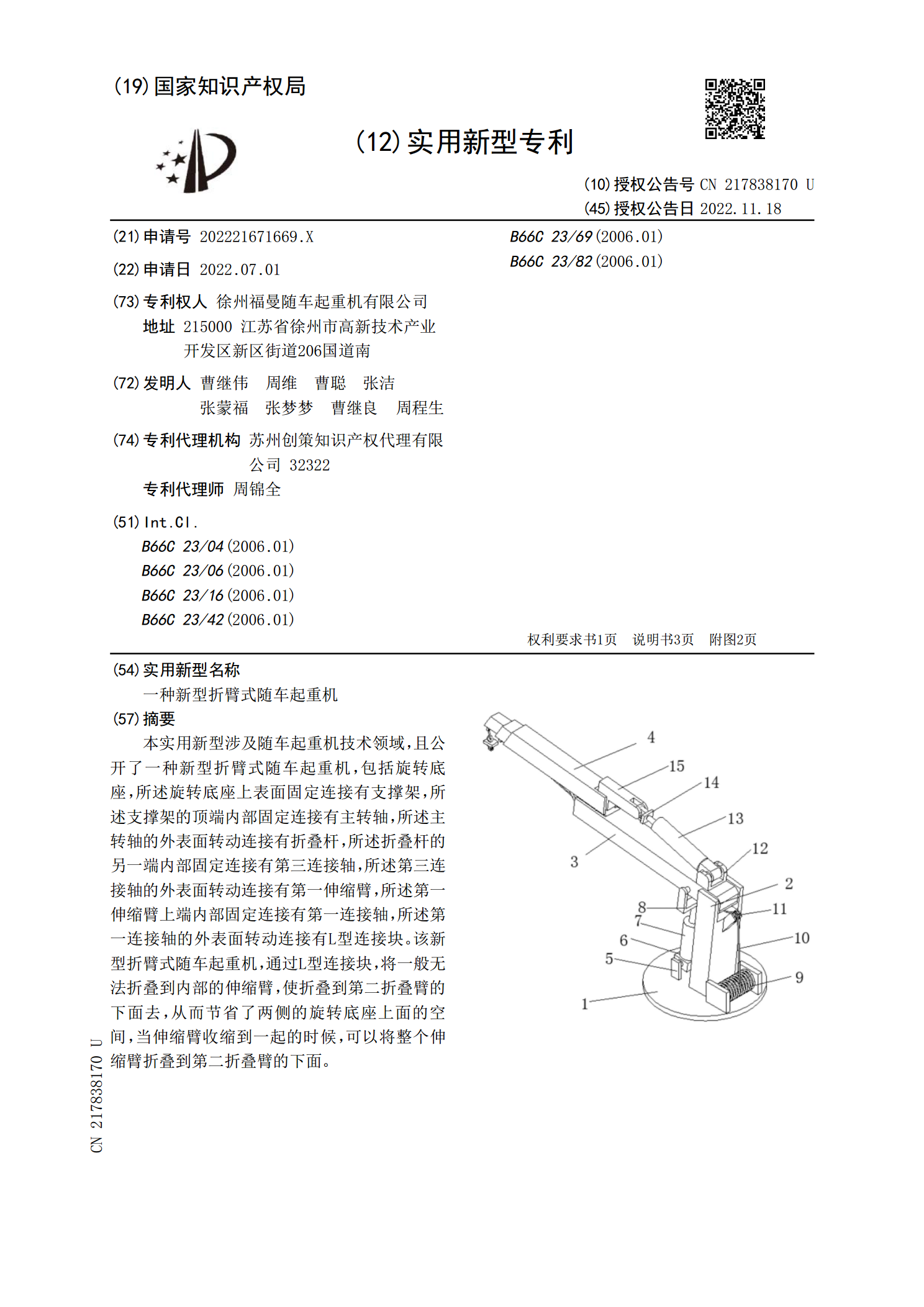
一种新型折臂式随车起重机.pdf
本实用新型涉及随车起重机技术领域,且公开了一种新型折臂式随车起重机,包括旋转底座,所述旋转底座上表面固定连接有支撑架,所述支撑架的顶端内部固定连接有主转轴,所述主转轴的外表面转动连接有折叠杆,所述折叠杆的另一端内部固定连接有第三连接轴,所述第三连接轴的外表面转动连接有第一伸缩臂,所述第一伸缩臂上端内部固定连接有第一连接轴,所述第一连接轴的外表面转动连接有L型连接块。该新型折臂式随车起重机,通过L型连接块,将一般无法折叠到内部的伸缩臂,使折叠到第二折叠臂的下面去,从而节省了两侧的旋转底座上面的空间,当伸缩臂
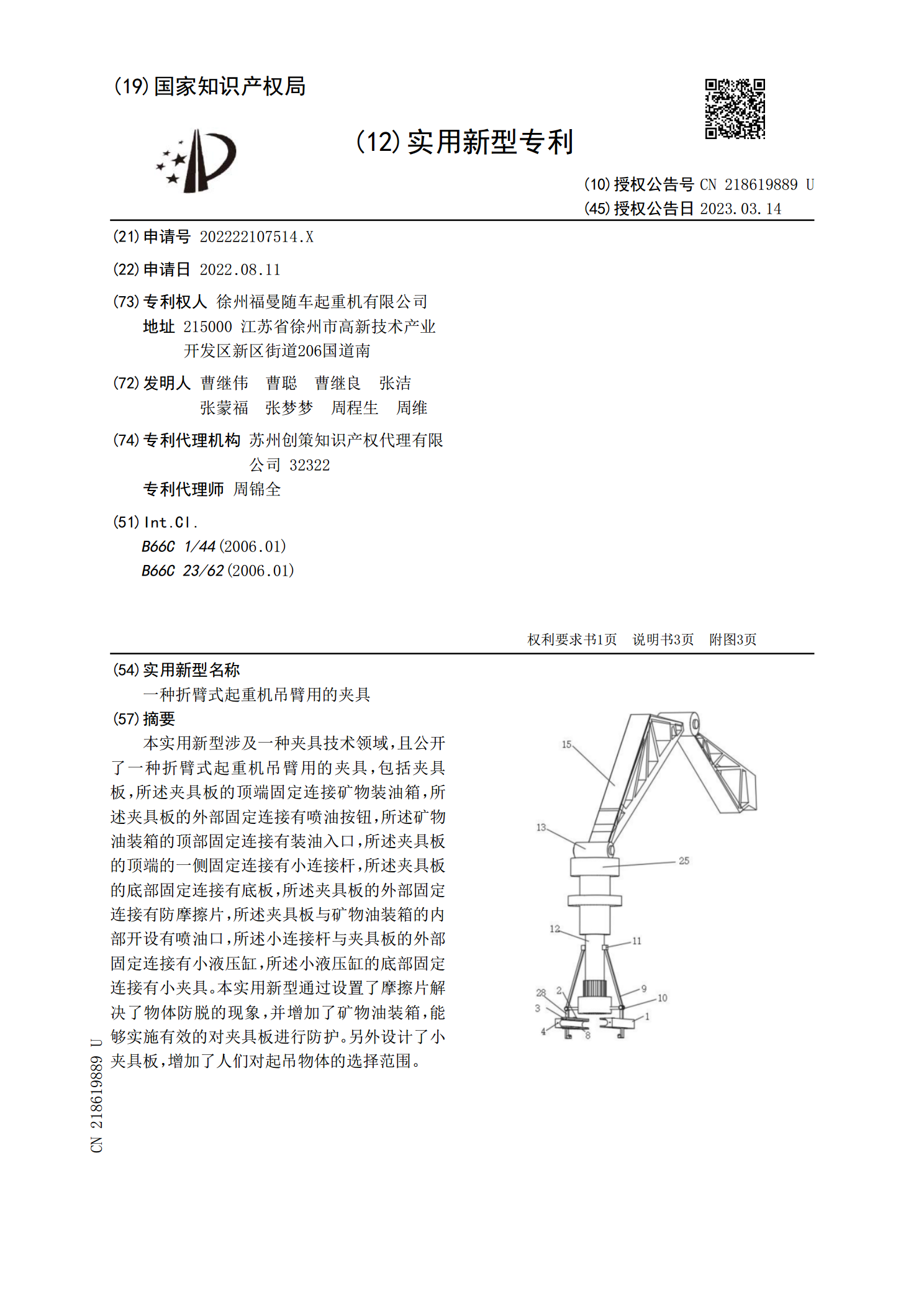
一种折臂式起重机吊臂用的夹具.pdf
本实用新型涉及一种夹具技术领域,且公开了一种折臂式起重机吊臂用的夹具,包括夹具板,所述夹具板的顶端固定连接矿物装油箱,所述夹具板的外部固定连接有喷油按钮,所述矿物油装箱的顶部固定连接有装油入口,所述夹具板的顶端的一侧固定连接有小连接杆,所述夹具板的底部固定连接有底板,所述夹具板的外部固定连接有防摩擦片,所述夹具板与矿物油装箱的内部开设有喷油口,所述小连接杆与夹具板的外部固定连接有小液压缸,所述小液压缸的底部固定连接有小夹具。本实用新型通过设置了摩擦片解决了物体防脱的现象,并增加了矿物油装箱,能够实施有效的

折臂式随车起重机底座有限元分析.docx
折臂式随车起重机底座有限元分析折臂式随车起重机底座有限元分析摘要:本文通过有限元分析方法对折臂式随车起重机底座进行了研究,利用ANSYS软件建立了底座的有限元模型,分析了底座在不同荷载作用下的应力和应变分布情况,为优化底座的设计提供了参考。关键词:折臂式随车起重机;底座;有限元分析;应力分布1.引言折臂式随车起重机是一种常见的装卸货物的设备,其底座是其重要组成部分之一。底座的设计将直接影响到起重机的稳定性和工作效能。因此,在设计折臂式随车起重机底座时需要对其进行深入的研究和分析,通过有限元分析方法可以得到
某折臂式随车起重机起升及卸载瞬态分析.pptx
,CONTENTS01.02.起升及卸载瞬态分析的必要性起升及卸载瞬态分析的目的和意义03.瞬态分析的基本原理折臂式随车起重机起升及卸载瞬态分析的步骤折臂式随车起重机起升及卸载瞬态分析的注意事项04.实例选择及背景介绍实例的起升及卸载瞬态分析过程实例的起升及卸载瞬态分析结果实例的起升及卸载瞬态分析结论05.折臂式随车起重机起升及卸载瞬态分析的结论总结折臂式随车起重机起升及卸载瞬态分析的局限性与展望折臂式随车起重机起升及卸载瞬态分析的未来研究方向感谢您的观看!