
基于声学多波束测深仪的障碍物识别方法、设备、介质.pdf

一吃****昕靓


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于声学多波束测深仪的障碍物识别方法、设备、介质.pdf
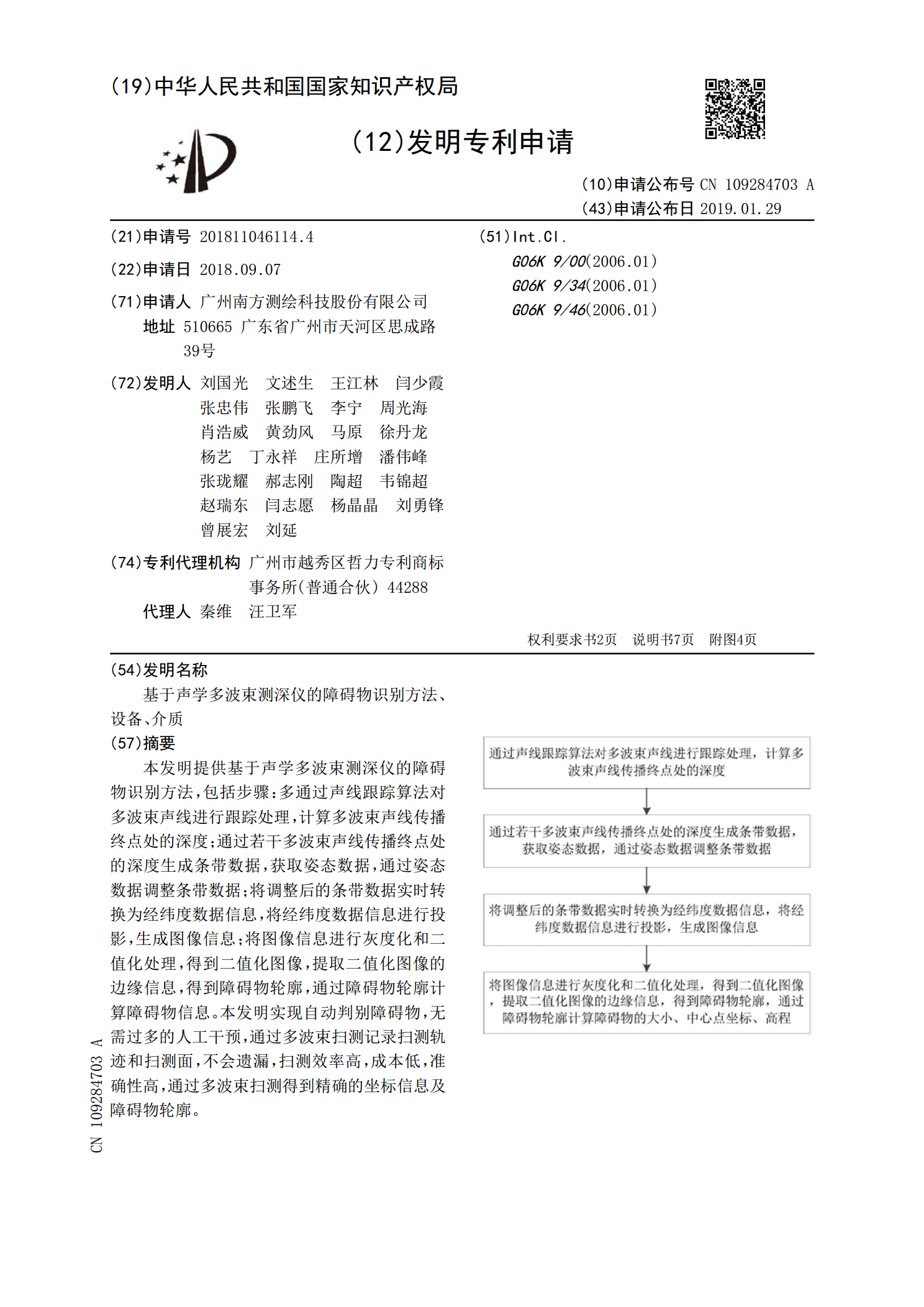
本发明提供基于声学多波束测深仪的障碍物识别方法,包括步骤:多通过声线跟踪算法对多波束声线进行跟踪处理,计算多波束声线传播终点处的深度;通过若干多波束声线传播终点处的深度生成条带数据,获取姿态数据,通过姿态数据调整条带数据;将调整后的条带数据实时转换为经纬度数据信息,将经纬度数据信息进行投影,生成图像信息;将图像信息进行灰度化和二值化处理,得到二值化图像,提取二值化图像的边缘信息,得到障碍物轮廓,通过障碍物轮廓计算障碍物信息。本发明实现自动判别障碍物,无需过多的人工干预,通过多波束扫测记录扫测轨迹和扫测面,

单波束测深仪声学指标的检测方法.docx
单波束测深仪声学指标的检测方法标题:单波束测深仪声学指标的检测方法引言:随着人类对海洋资源的开发利用需求增加,对海域深度的测量变得尤为重要。其中,单波束测深仪作为一种常用的水深测量设备,采用声学技术进行测量。本论文旨在研究单波束测深仪的声学指标检测方法,通过对声学原理和参数测定方法的研究分析,为实际应用提供技术支持和参考。一、单波束测深仪的基本原理单波束测深仪是利用声波在水中传播的特性进行深度测量的装置。其基本原理是通过发射声波信号,并记录信号从发射到接收所经历的时间,再根据声波在水中传播的速度推算出测量

多波束测深仪的学习心得.doc
多波束测深仪的学习心得姓名:韩衍微单位:烟台裕和建筑安装有限公司日期:2011-06-1目录一.。。。。。。。。。。。。。。。。。。。。。。。。单频测深仪的使用与安装。二.。。。。。。。。。。。。。。。。。。。。。。。。验流计的使用。三.。。。。。。。。。。。。。。。。。。。。。。。。扫描仪的使用。四.。。。。。。。。。。。。。。。。。。。。。。。。多波束各组成部分的学习。1.多波束各个组成部分的认识。(1)Vs110的使用。(2)smc姿态传感器的使用。(3)EM3002的使用。(4)Digibarpr

多波束测深仪在航道测量的应用分析.docx
多波束测深仪在航道测量的应用分析一、背景介绍随着船舶的增多和大型化,安全航行的需求日益迫切,而准确、可靠的航道深度数据是保障船舶安全航行的基础,因此深度探测技术在航道测量中具有极其重要的应用价值。传统的单波束测深仪因测量范围有限、测量精度有限、易受海洋环境影响等弊端而受到了一些限制,为了解决这些问题和提高深度测量的精度和效率,多波束测深技术应运而生。二、多波束测深仪工作原理多波束测深仪是利用声波在水中传播速度较快,传播路径和距离易于测量等特点,通过在水中发射多个不同频率和不同发射角度的声波,测量声波反射回

多波束测深仪扫幅宽度评估方法.docx
多波束测深仪扫幅宽度评估方法1.简介多波束测深仪(multibeamechosounder,MBES)是一种高精度、高效率的水深测量工具,它可以在海洋中迅速获取水深和底质参数等信息,并辅助海洋科学、海底地质、工程勘探、水下资源调查等领域的研究和应用。多波束测深仪主要由水声发射器、接收器、信号处理器和数据显示器等部分组成,其测深原理是利用水声波在水中的传播和反射,通过接收回波信号计算出海底的深度。多波束测深仪的扫描宽度是衡量它测量效率和精度的重要标准之一。正确评估多波束测深仪的扫描宽度,可以有效提高海底地貌