
一种金刚线绕线方法.pdf

书生****66

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种金刚线绕线方法.pdf
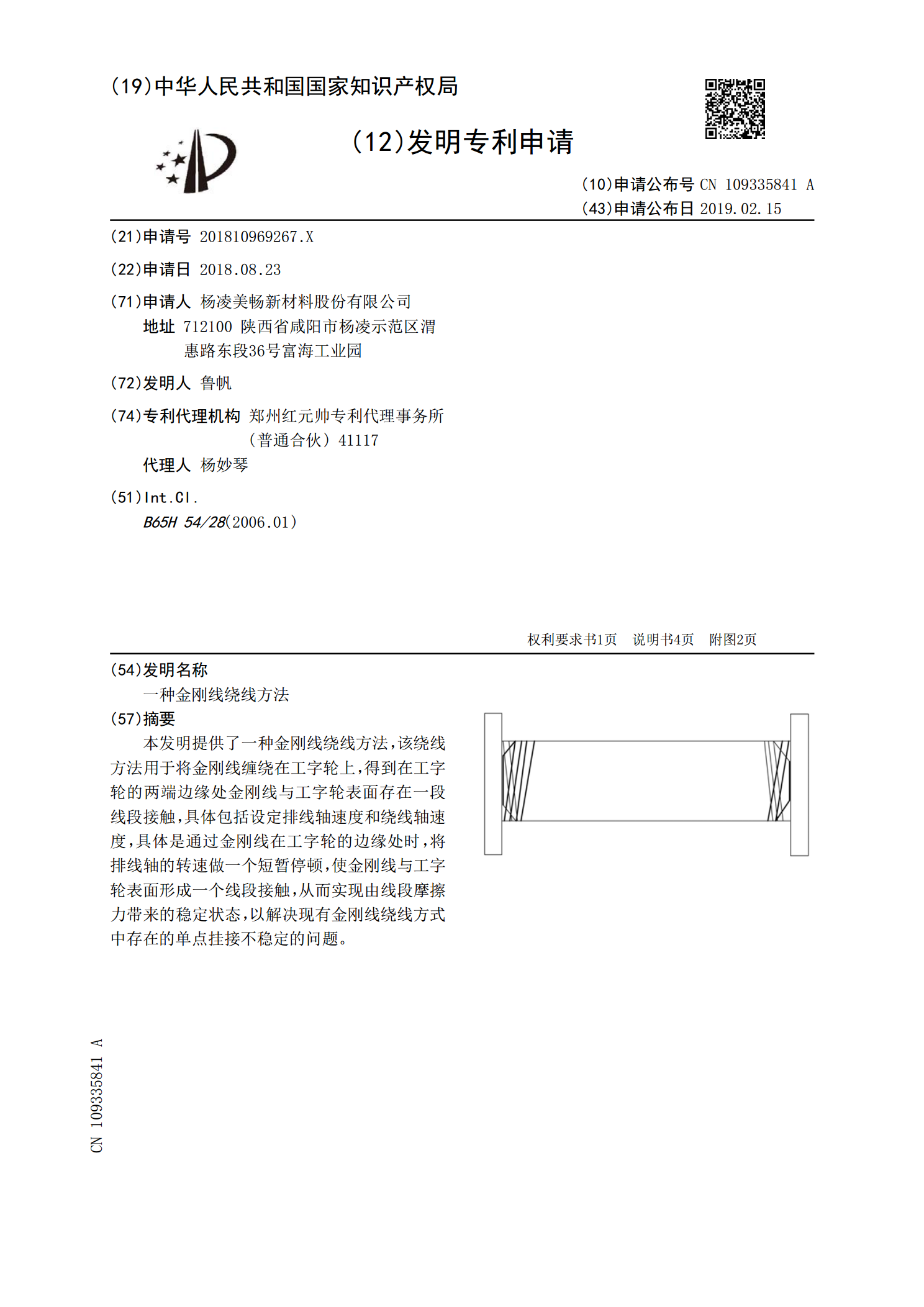
本发明提供了一种金刚线绕线方法,该绕线方法用于将金刚线缠绕在工字轮上,得到在工字轮的两端边缘处金刚线与工字轮表面存在一段线段接触,具体包括设定排线轴速度和绕线轴速度,具体是通过金刚线在工字轮的边缘处时,将排线轴的转速做一个短暂停顿,使金刚线与工字轮表面形成一个线段接触,从而实现由线段摩擦力带来的稳定状态,以解决现有金刚线绕线方式中存在的单点挂接不稳定的问题。
442金刚线改造八轮绕线方式.pdf
本发明公开了一种442金刚线改造八轮绕线方式,包括壳体、收线轮、放线轮、并列两组排线单元、并列两组张紧单元、并列两组过渡万向轮、进线万向轮、出线万向轮、第一切片主辊、第二切片主辊、金刚线;通过绕线方式的突破性改进,实现八个大轮替代原有十七个小滑轮,线轮数量大幅减少;且过渡线轮、进线轮、出线轮可多向调节,同时过渡线轮、进线轮、出线轮特定运行切线与水平方向转轴同轴心的设计,使得微调时一端金刚线保持不动,维护更加方便;本发明同时实现充分可调、方便调节,从根本上解决了金刚线切断线、跳线频繁的问题,且适用于砂浆切片

442金刚线改造六轮绕线方式.pdf
本发明公开了一种442金刚线改造六轮绕线方式,包括壳体、收线轮、放线轮、并列两组排线单元、并列两组张紧单元、进线调节轮、出线调节轮、第一切片主辊、第二切片主辊、金刚线;通过绕线方式的突破性改进,实现六个大轮替代原有十七个小滑轮,线轮数量已达到最少;且进线轮、出线轮转轴与第一切片主辊、第二切片主辊转轴垂直的设计,方便调节,金刚线切片区域可随意扩展,具有简洁稳定、方便调节、方便扩展的特点,彻底解决了金刚线断线、跳线频繁的问题,且适用于砂浆切片改造,极大地降低了成本。

线圈的多线绕线装置及其多线绕线方法.pdf
本发明涉及的线圈的多线绕线装置,包括:卷芯(21);主轴(31),上述卷芯(21)以可拆卸的方式安装在该主轴(31)的顶端,且该主轴(31)与上述卷芯(21)共同旋转;线材供给飞轮(41),其一边在安装于上述主轴(31)的上述卷芯(21)的周围旋转一边放出线材(11);卷芯拆卸机构(60),其使上述卷芯(21)沿着轴向移动而从上述主轴(31)拆下该卷芯(21);支承构件(66),其沿轴向以隔开期望间隔的方式支承与上述主轴(31)相对且由上述卷芯拆卸机构(60)拆卸的上述多个卷芯(21);以及支承构件移动机
单线或多线的绕线方法.pdf
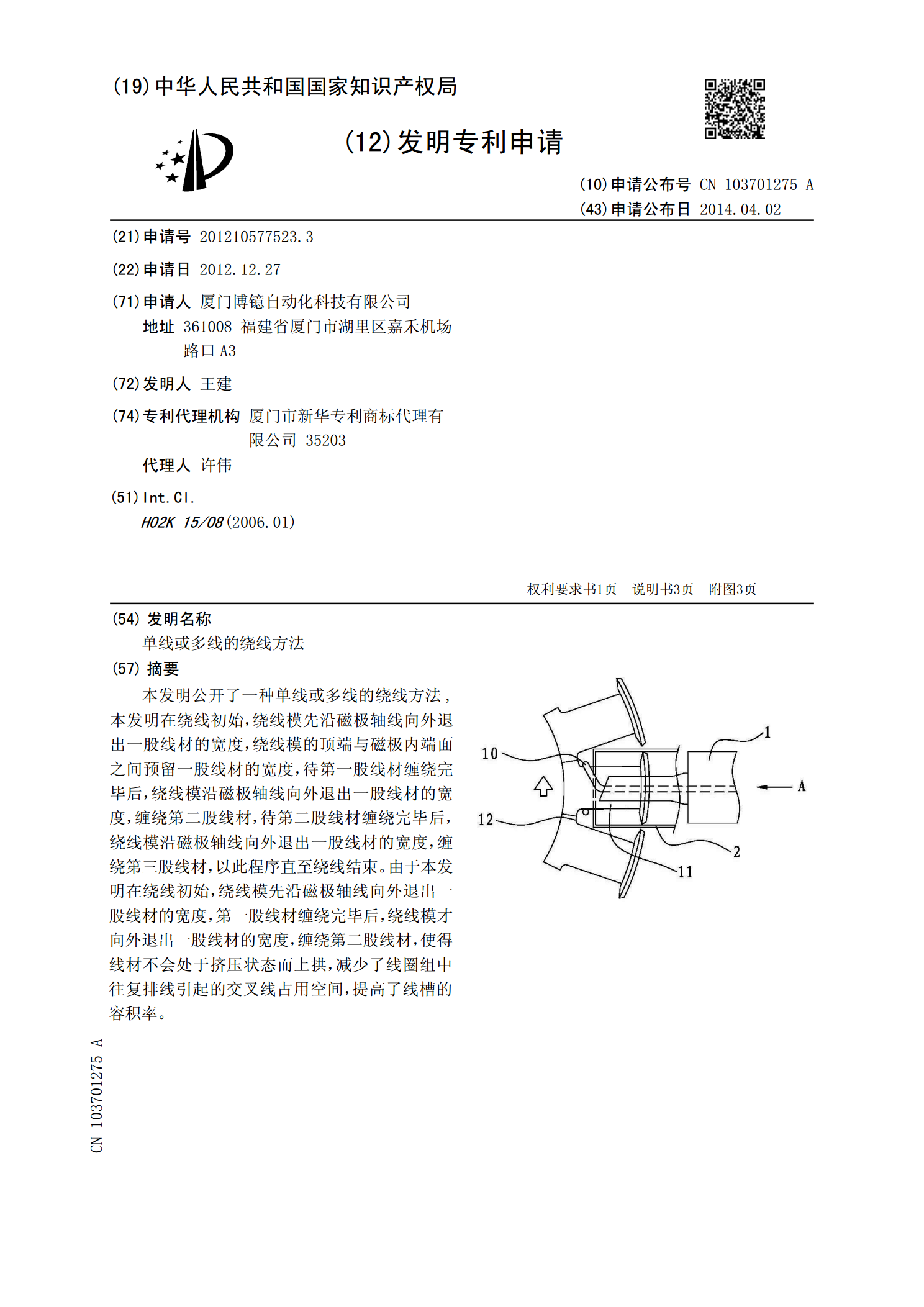
本发明公开了一种单线或多线的绕线方法,本发明在绕线初始,绕线模先沿磁极轴线向外退出一股线材的宽度,绕线模的顶端与磁极内端面之间预留一股线材的宽度,待第一股线材缠绕完毕后,绕线模沿磁极轴线向外退出一股线材的宽度,缠绕第二股线材,待第二股线材缠绕完毕后,绕线模沿磁极轴线向外退出一股线材的宽度,缠绕第三股线材,以此程序直至绕线结束。由于本发明在绕线初始,绕线模先沿磁极轴线向外退出一股线材的宽度,第一股线材缠绕完毕后,绕线模才向外退出一股线材的宽度,缠绕第二股线材,使得线材不会处于挤压状态而上拱,减少了线圈组中往