
一种蓝莓采摘及筛选一体装置.pdf

fu****级甜


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种蓝莓采摘及筛选一体装置.pdf
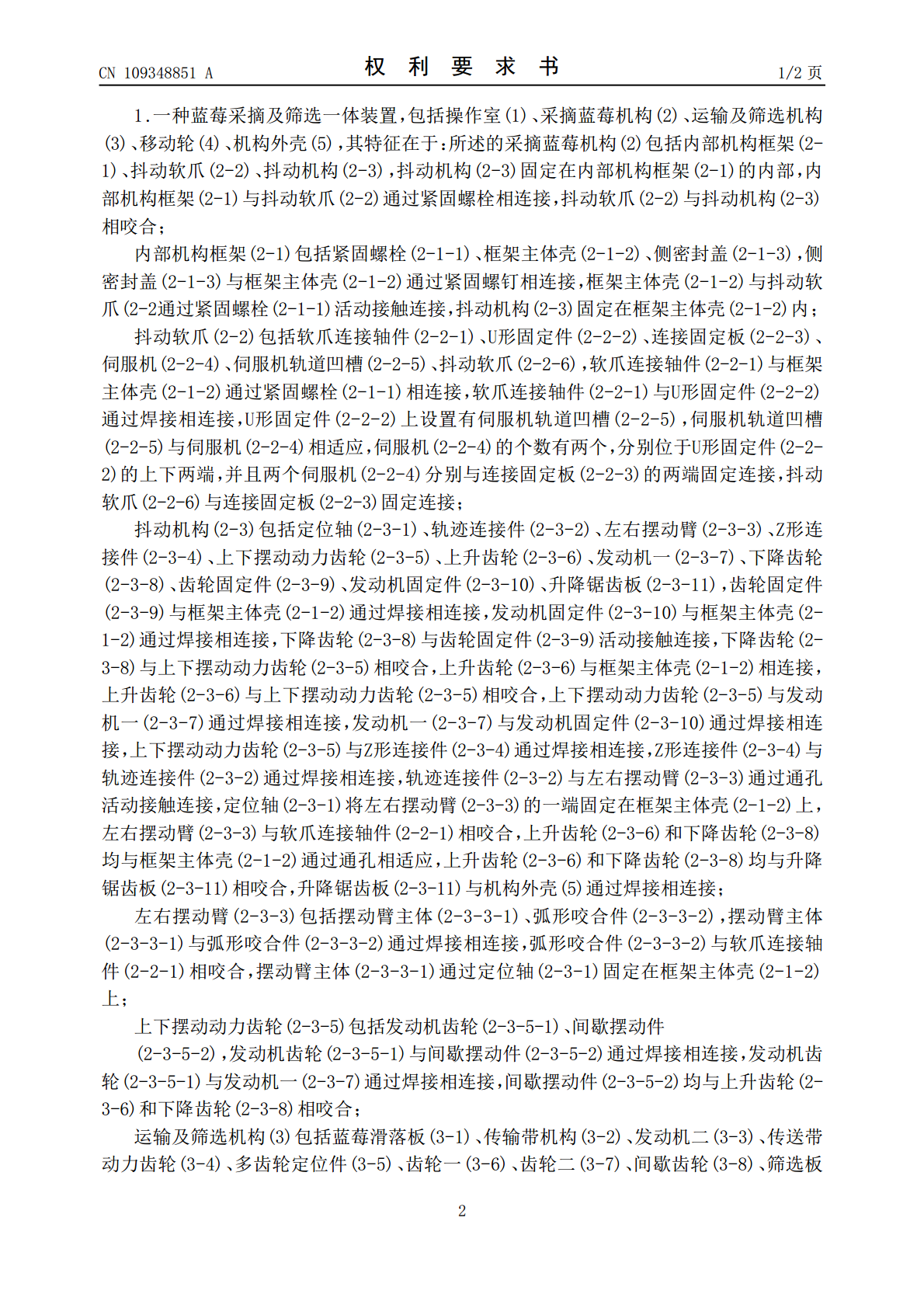
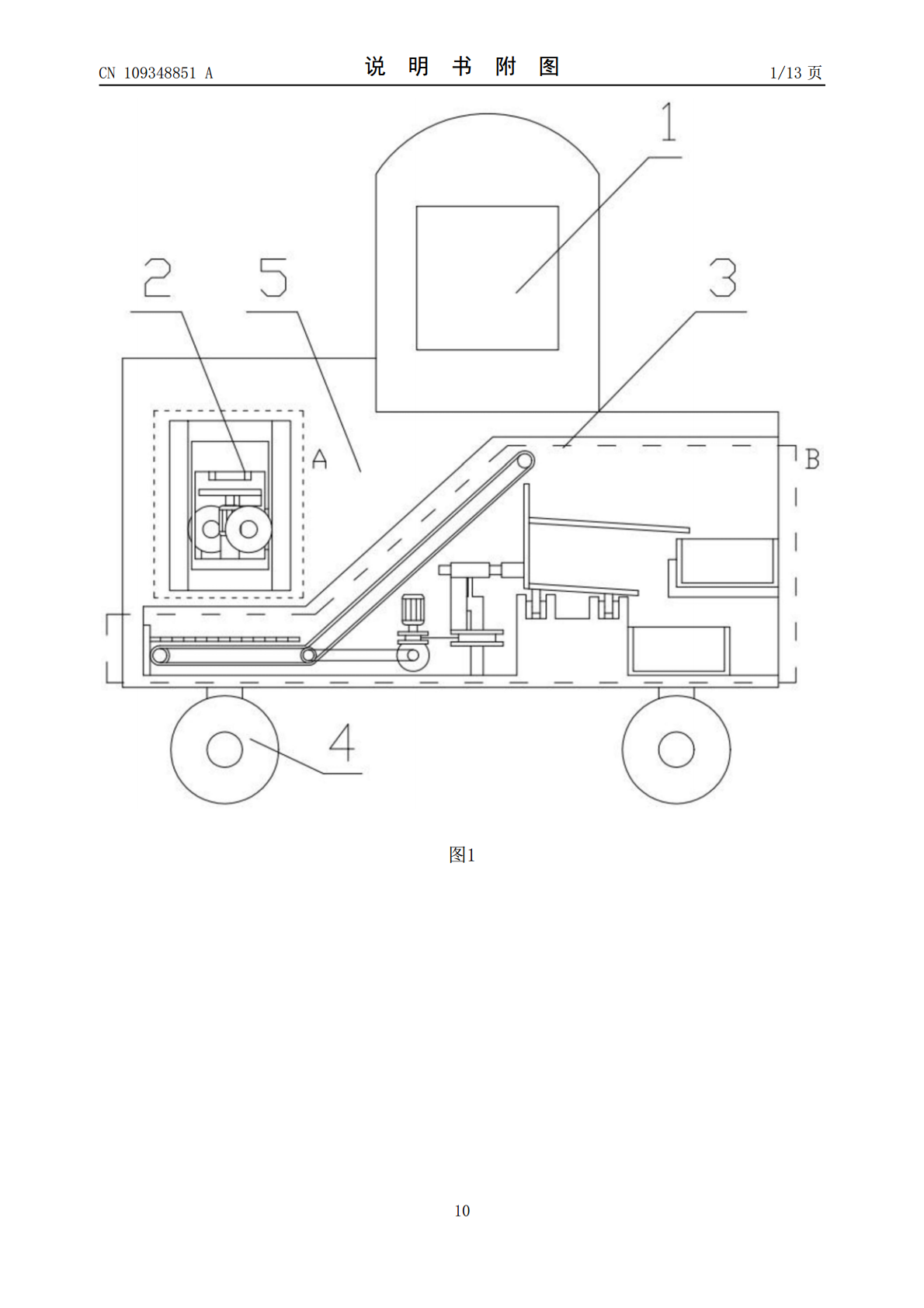
本发明涉及一种蓝莓采摘器械,更具体的说是一种蓝莓采摘及筛选一体装置,包括操作室、采摘蓝莓机构、运输及筛选机构、移动轮、机构外壳,本装置同时具备采摘、筛选、装箱三种功能,节省大量的采摘时间,效果更高,更加的便捷,装置结构合理,便于操作。采摘蓝莓机构安装在机构外壳的内部,运输及筛选机构安装在机构外壳的内部,操作室设置在机构外壳的顶端,移动轮与机构外壳相连接。

一种蓝莓采摘装置.pdf
本发明属于农业机械技术领域,涉及一种蓝莓采摘装置,包括行走装置;支撑体,设置在行走装置的上侧;采摘组件,设置在支撑体上,包括往复移动构件,其固定件设置在支撑体上,其移动件上设置有采摘爪,采摘爪包括多个铁质的块体,块体分别卡装在移动件上开设的竖向槽体内,多个块体之间通过第一弹性件连接,每个块体上连接有板体;竖向槽体内还内嵌有多个电磁铁,电磁铁与块体一一对应设置,块体远离电磁铁的一侧还设置有复位组件,复位组件用于在电磁铁失电的情况下带动块体移动到原位;控制器,与行走装置、往复移动构件和电磁铁电连接,控制器通过
一种蓝莓采摘装置.pdf
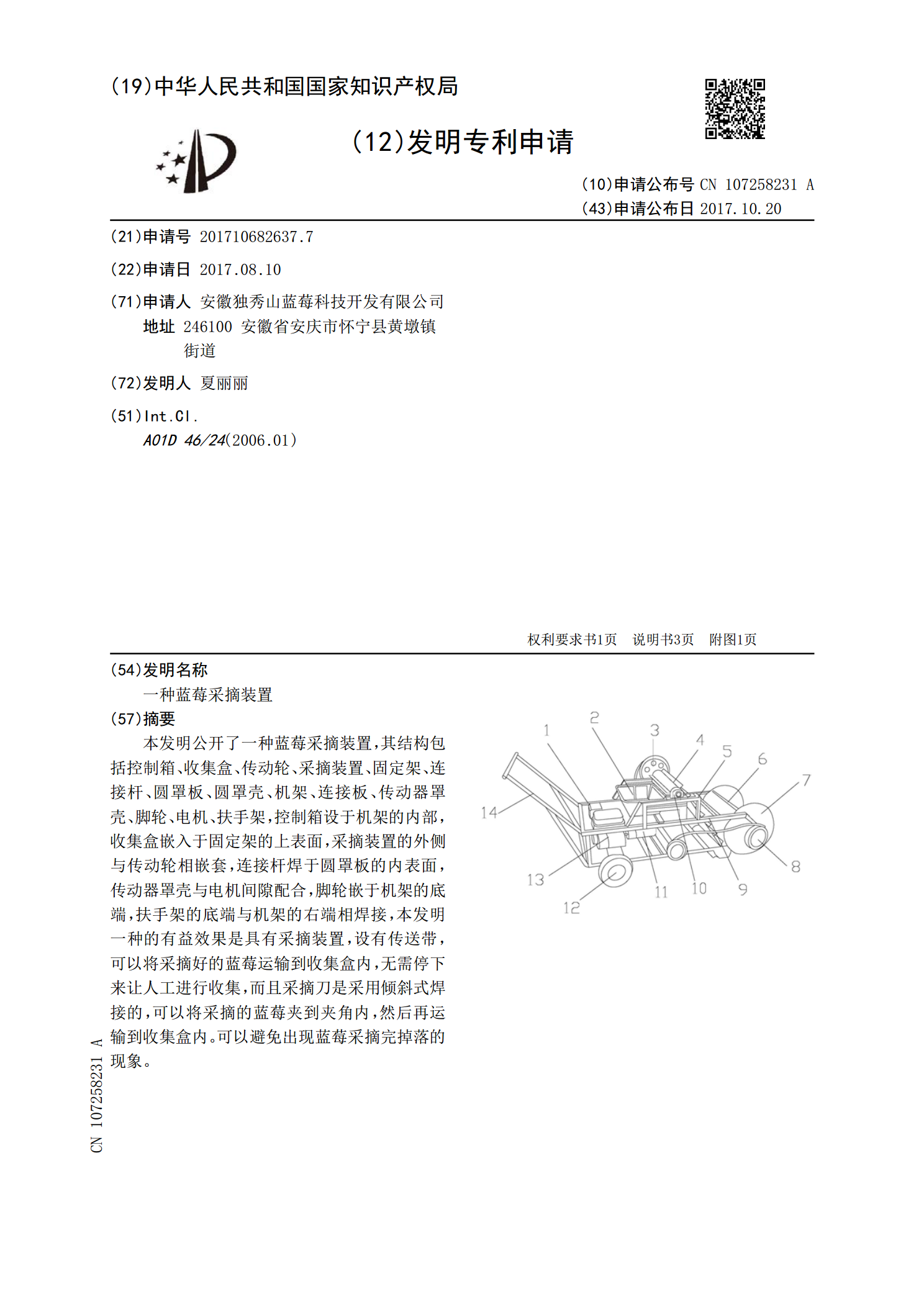
本发明公开了一种蓝莓采摘装置,其结构包括控制箱、收集盒、传动轮、采摘装置、固定架、连接杆、圆罩板、圆罩壳、机架、连接板、传动器罩壳、脚轮、电机、扶手架,控制箱设于机架的内部,收集盒嵌入于固定架的上表面,采摘装置的外侧与传动轮相嵌套,连接杆焊于圆罩板的内表面,传动器罩壳与电机间隙配合,脚轮嵌于机架的底端,扶手架的底端与机架的右端相焊接,本发明一种的有益效果是具有采摘装置,设有传送带,可以将采摘好的蓝莓运输到收集盒内,无需停下来让人工进行收集,而且采摘刀是采用倾斜式焊接的,可以将采摘的蓝莓夹到夹角内,然后再运

一种蓝莓筛选装置.pdf
本发明公开了一种蓝莓筛选装置,包括底座,底座内开设有容纳腔,容纳腔内滑动插接有收集盒,且容纳腔上方为开口端,底座一端顶面固定设有支撑台,支撑台顶面固定设有驱动电机,驱动电机的输出轴固定套接有凸轮,底座另一端顶面通过销轴铰接有筛盘,筛盘一端底面与凸轮外壁滑动贴合,且筛盘底部固定设有筛网,筛网靠近驱动电机的一端固定连接有进料装置,进料装置两端顶面固定设有防护板,防护板内侧的进料装置顶面开设有进料口,进料口底部连通设有出料口,出料口与筛盘底部固定连接的筛网相对,本发明利用此装置可对蓝莓进行有效快捷的筛选作业。
一种便捷蓝莓筛选装置.pdf
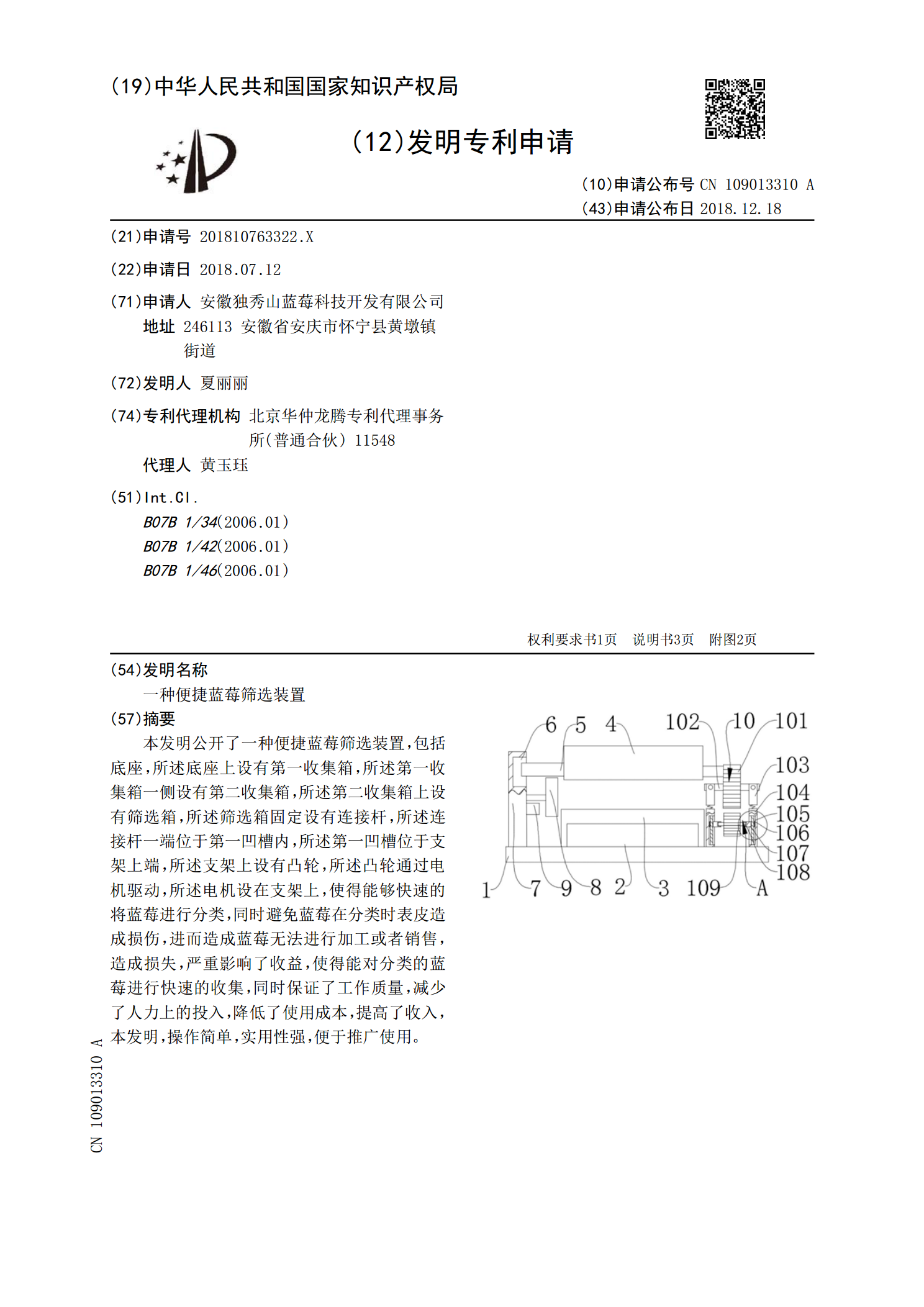
本发明公开了一种便捷蓝莓筛选装置,包括底座,所述底座上设有第一收集箱,所述第一收集箱一侧设有第二收集箱,所述第二收集箱上设有筛选箱,所述筛选箱固定设有连接杆,所述连接杆一端位于第一凹槽内,所述第一凹槽位于支架上端,所述支架上设有凸轮,所述凸轮通过电机驱动,所述电机设在支架上,使得能够快速的将蓝莓进行分类,同时避免蓝莓在分类时表皮造成损伤,进而造成蓝莓无法进行加工或者销售,造成损失,严重影响了收益,使得能对分类的蓝莓进行快速的收集,同时保证了工作质量,减少了人力上的投入,降低了使用成本,提高了收入,本发明,