
一种基于参数化建模的弧面凸轮分度机构传动精度分析方法.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于参数化建模的弧面凸轮分度机构传动精度分析方法.pdf
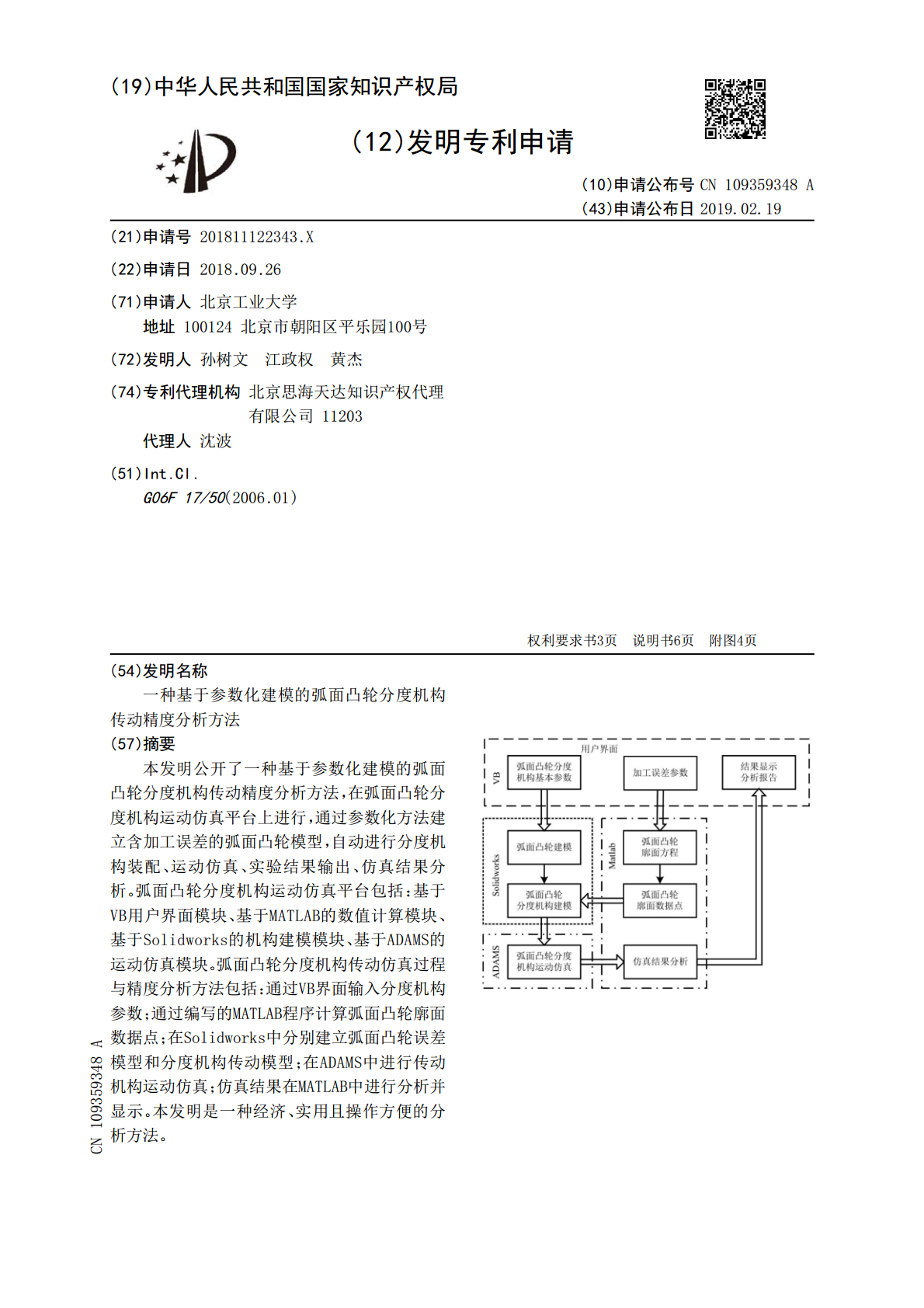
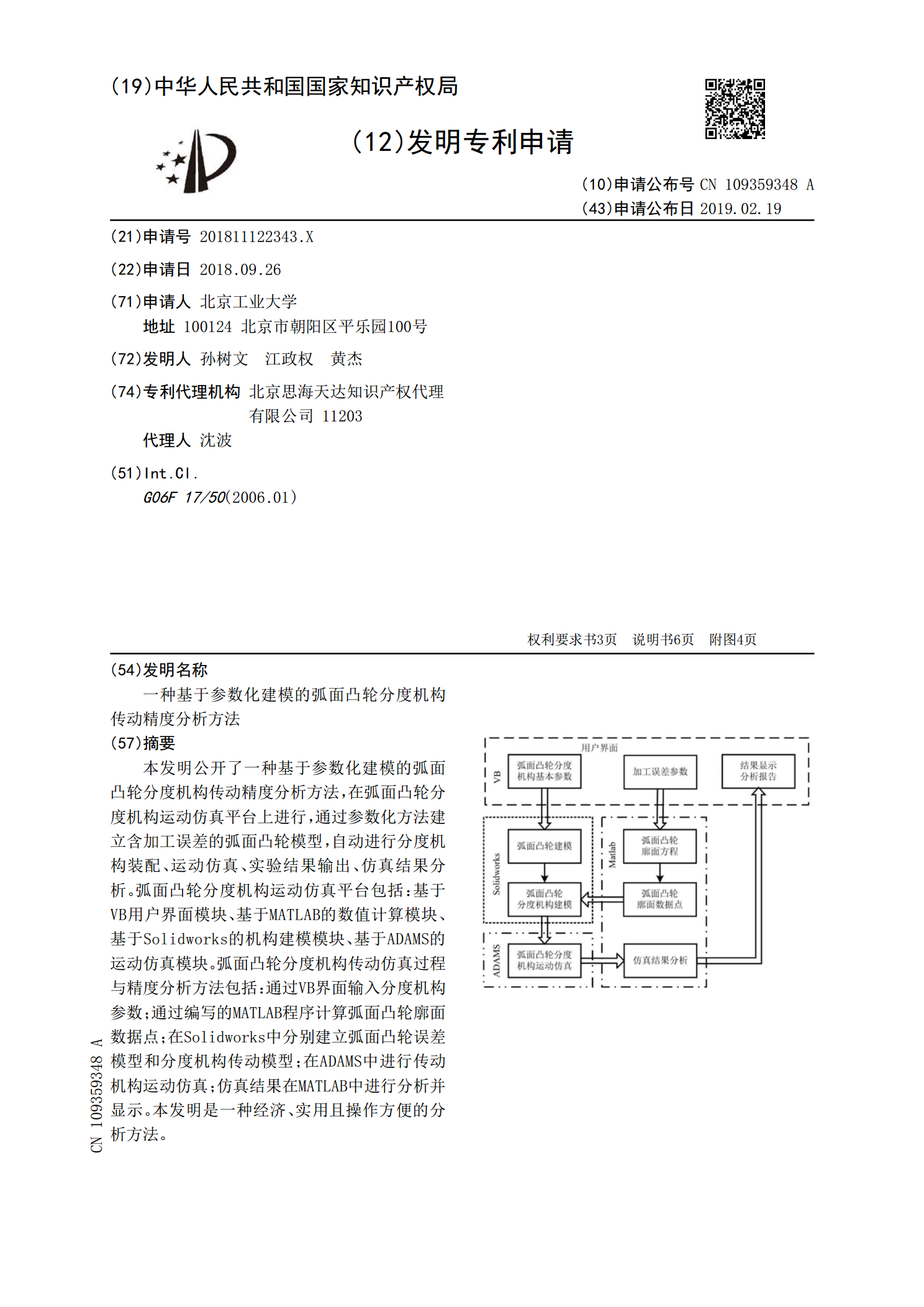
本发明公开了一种基于参数化建模的弧面凸轮分度机构传动精度分析方法,在弧面凸轮分度机构运动仿真平台上进行,通过参数化方法建立含加工误差的弧面凸轮模型,自动进行分度机构装配、运动仿真、实验结果输出、仿真结果分析。弧面凸轮分度机构运动仿真平台包括:基于VB用户界面模块、基于MATLAB的数值计算模块、基于Solidworks的机构建模模块、基于ADAMS的运动仿真模块。弧面凸轮分度机构传动仿真过程与精度分析方法包括:通过VB界面输入分度机构参数;通过编写的MATLAB程序计算弧面凸轮廓面数据点;在Solidwo
多头弧面分度凸轮机构参数化设计方法.pdf
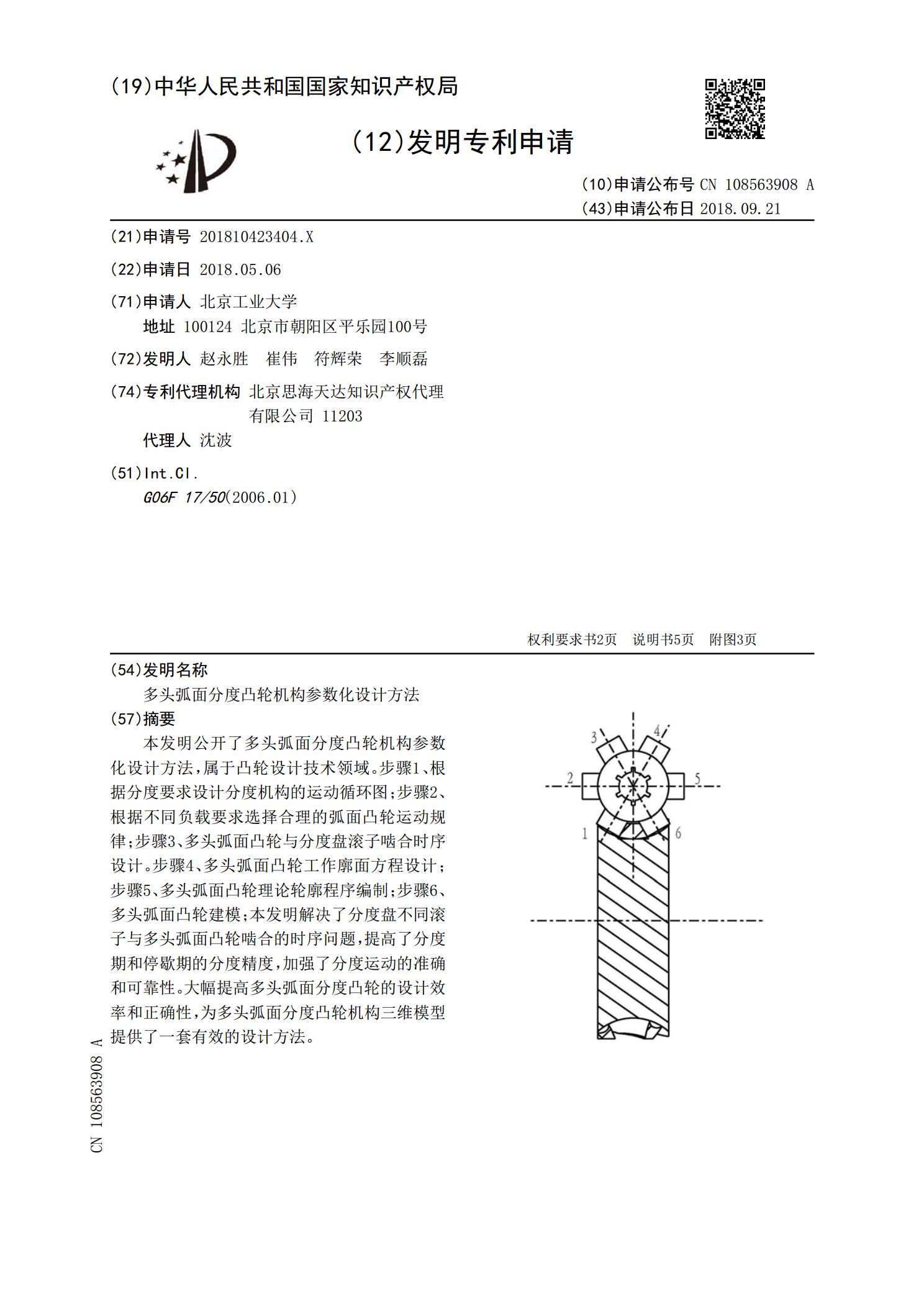
本发明公开了多头弧面分度凸轮机构参数化设计方法,属于凸轮设计技术领域。步骤1、根据分度要求设计分度机构的运动循环图;步骤2、根据不同负载要求选择合理的弧面凸轮运动规律;步骤3、多头弧面凸轮与分度盘滚子啮合时序设计。步骤4、多头弧面凸轮工作廓面方程设计;步骤5、多头弧面凸轮理论轮廓程序编制;步骤6、多头弧面凸轮建模;本发明解决了分度盘不同滚子与多头弧面凸轮啮合的时序问题,提高了分度期和停歇期的分度精度,加强了分度运动的准确和可靠性。大幅提高多头弧面分度凸轮的设计效率和正确性,为多头弧面分度凸轮机构三维模型提
一种基于Creo的弧面分度凸轮建模方法.pdf
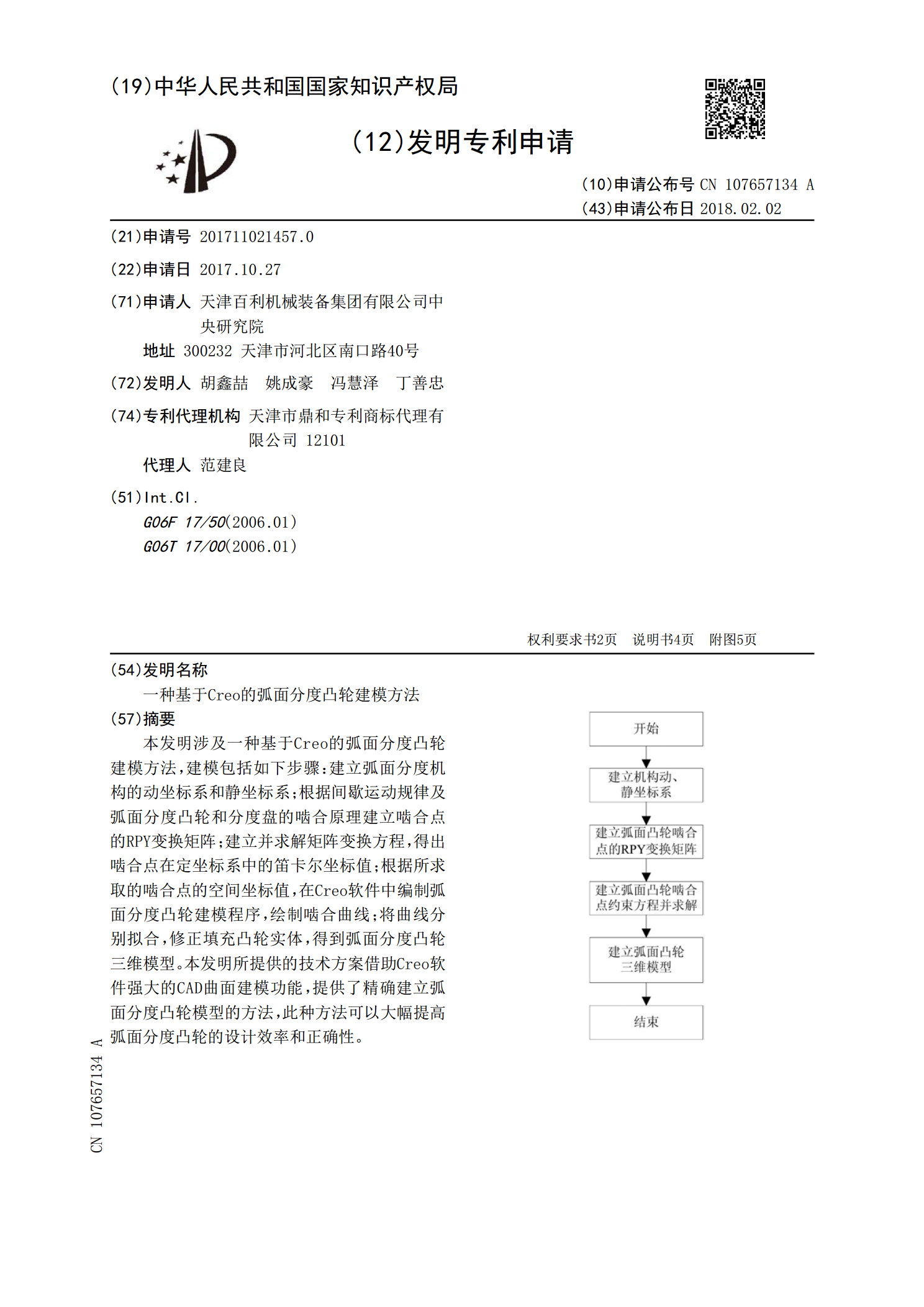
本发明涉及一种基于Creo的弧面分度凸轮建模方法,建模包括如下步骤:建立弧面分度机构的动坐标系和静坐标系;根据间歇运动规律及弧面分度凸轮和分度盘的啮合原理建立啮合点的RPY变换矩阵;建立并求解矩阵变换方程,得出啮合点在定坐标系中的笛卡尔坐标值;根据所求取的啮合点的空间坐标值,在Creo软件中编制弧面分度凸轮建模程序,绘制啮合曲线;将曲线分别拟合,修正填充凸轮实体,得到弧面分度凸轮三维模型。本发明所提供的技术方案借助Creo软件强大的CAD曲面建模功能,提供了精确建立弧面分度凸轮模型的方法,此种方法可以大幅

基于ProE的弧面分度凸轮机构实体建模.docx
基于ProE的弧面分度凸轮机构实体建模随着制造业的发展,机械工业的需求也越来越复杂和高端化。从高速运动机构到高精密运动机构,离不开高效、精确且可靠性强的凸轮机构。而离不开ProE软件的支撑与辅助。在本文中,将详细介绍基于ProE的弧面分度凸轮机构实体建模的过程。1.凸轮机构是什么?凸轮机构在机械工业中的运用非常广泛,它是机械元件中速度变化转换的元素。凸轮机构由凸轮和随之运动的接触元件组成(一般是凸轮轴)。在机械加工中,随着机械加工精度的提高,凸轮机构开始越来越广泛的应用于高瓣发动机、六缸发动机、机床、自动
一种弧面分度凸轮机构参数优化方法.pdf
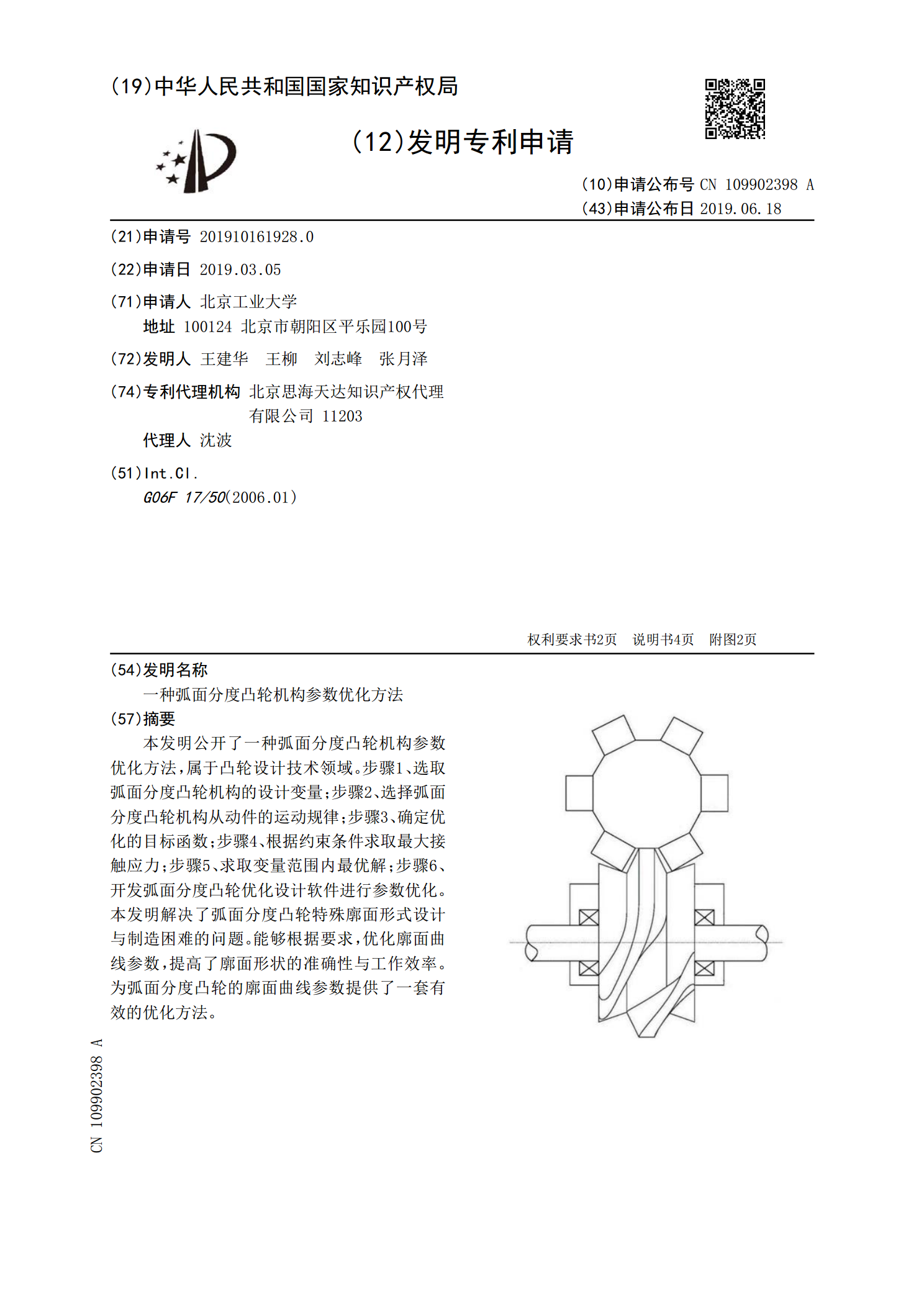
本发明公开了一种弧面分度凸轮机构参数优化方法,属于凸轮设计技术领域。步骤1、选取弧面分度凸轮机构的设计变量;步骤2、选择弧面分度凸轮机构从动件的运动规律;步骤3、确定优化的目标函数;步骤4、根据约束条件求取最大接触应力;步骤5、求取变量范围内最优解;步骤6、开发弧面分度凸轮优化设计软件进行参数优化。本发明解决了弧面分度凸轮特殊廓面形式设计与制造困难的问题。能够根据要求,优化廓面曲线参数,提高了廓面形状的准确性与工作效率。为弧面分度凸轮的廓面曲线参数提供了一套有效的优化方法。