
一种智能移位机.pdf

山柳****魔王

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能移位机.pdf
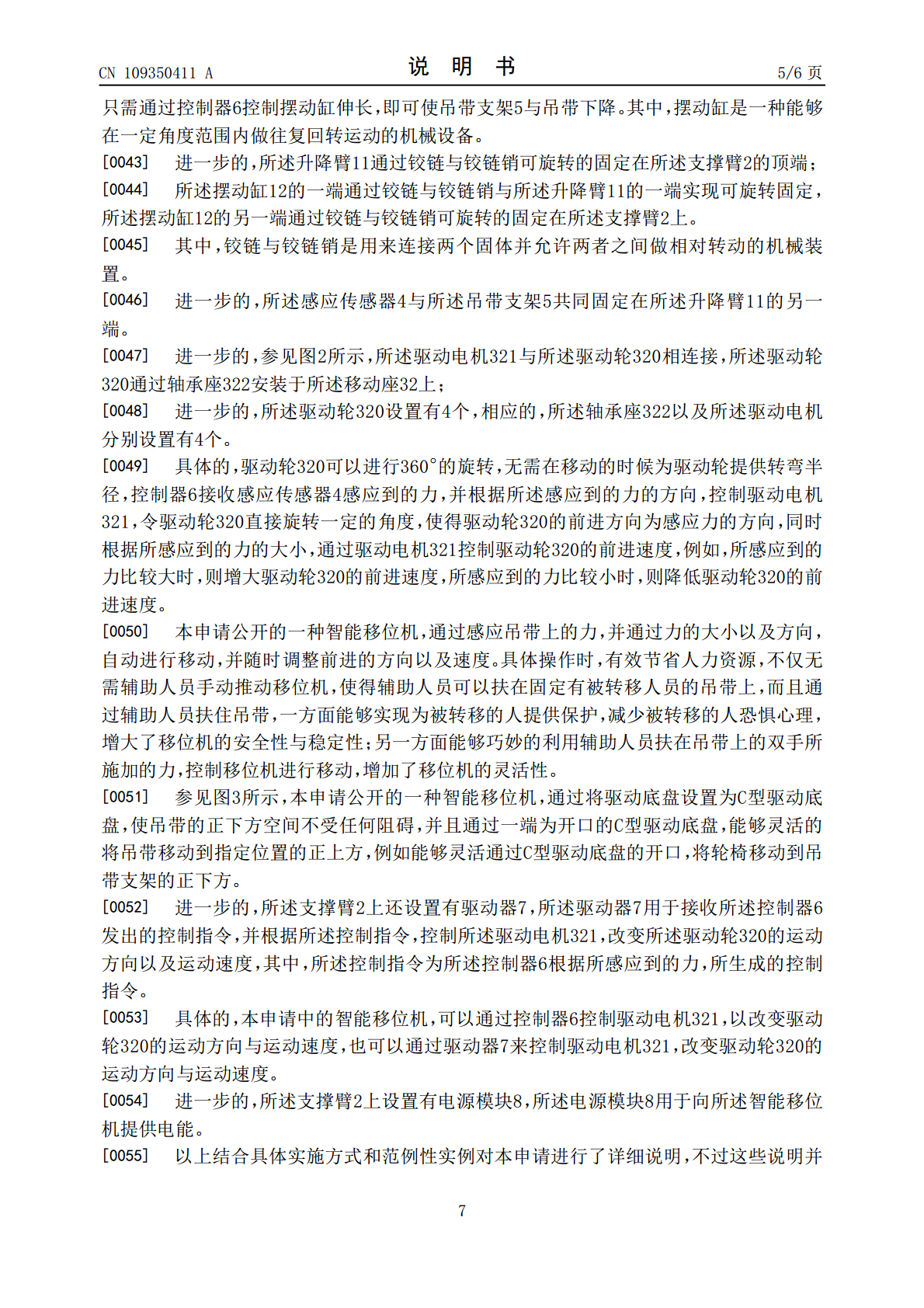
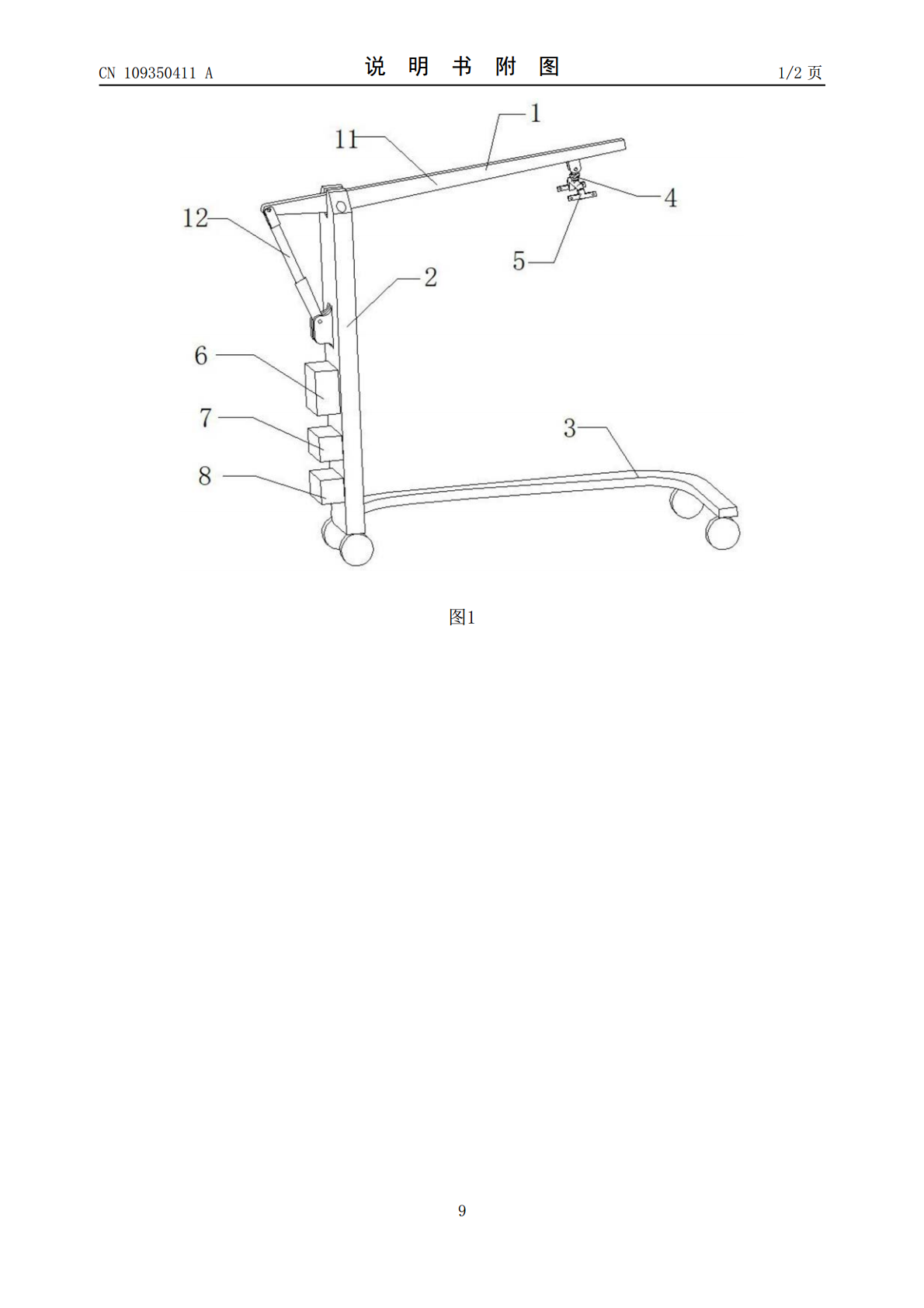
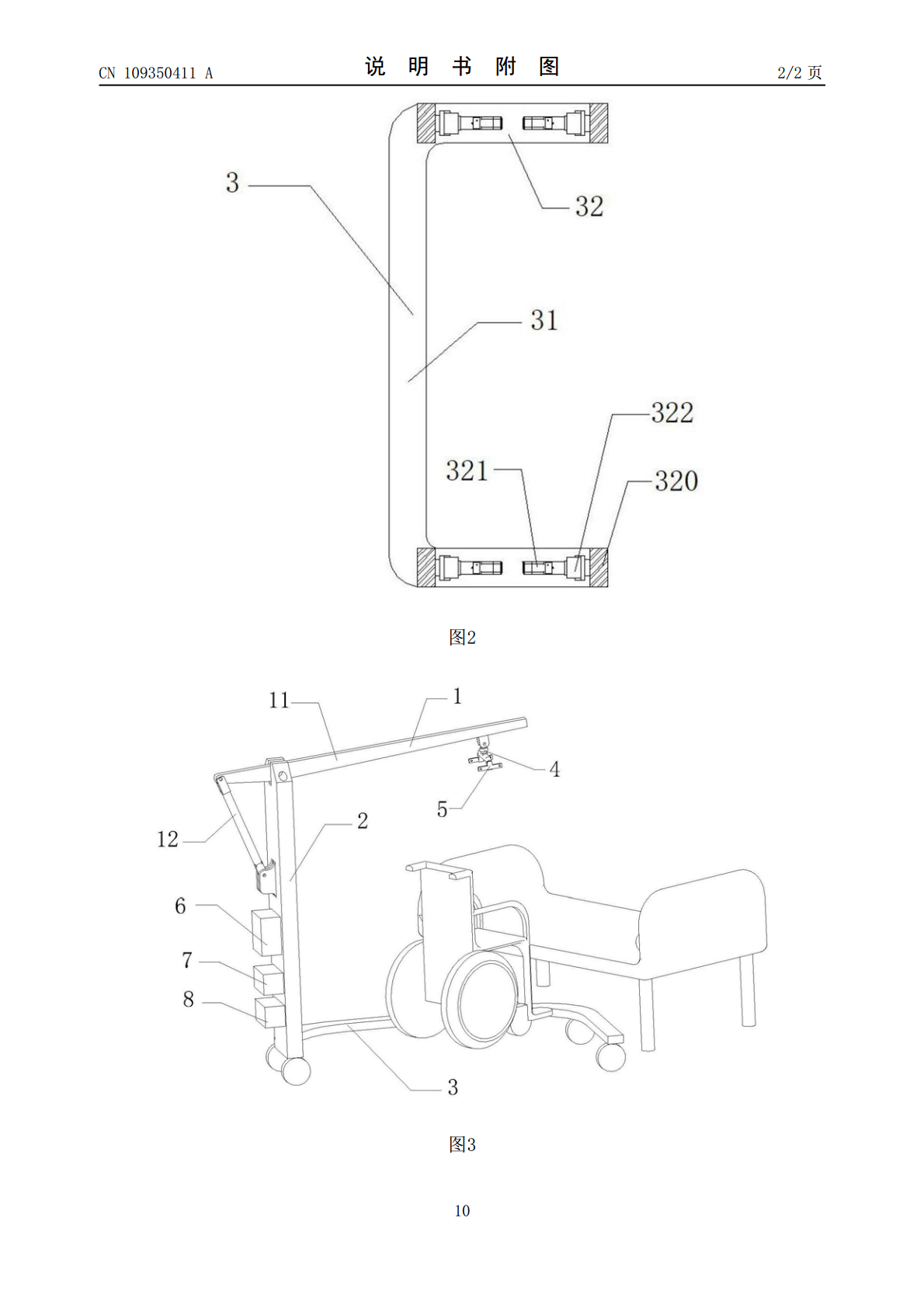
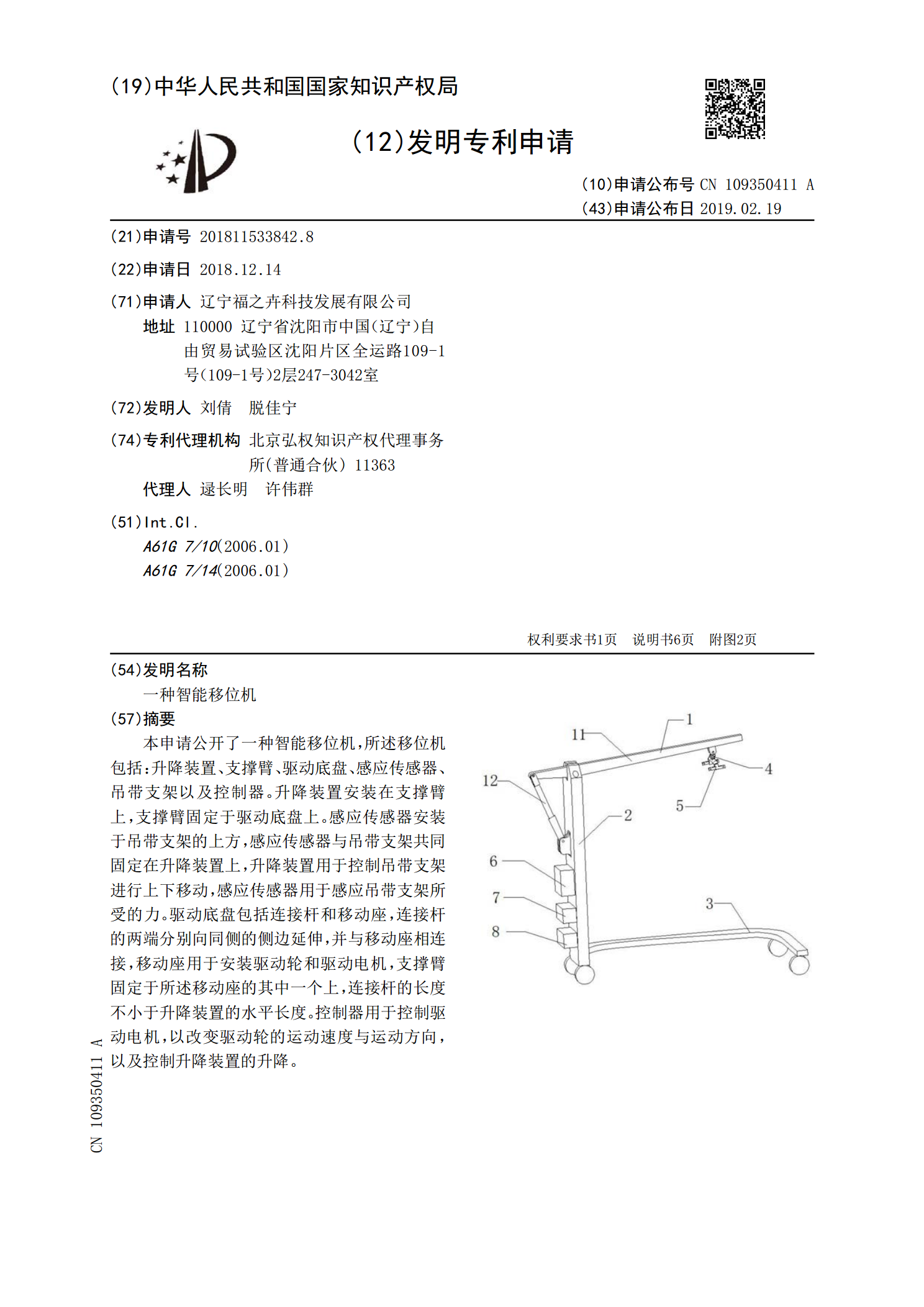
本申请公开了一种智能移位机,所述移位机包括:升降装置、支撑臂、驱动底盘、感应传感器、吊带支架以及控制器。升降装置安装在支撑臂上,支撑臂固定于驱动底盘上。感应传感器安装于吊带支架的上方,感应传感器与吊带支架共同固定在升降装置上,升降装置用于控制吊带支架进行上下移动,感应传感器用于感应吊带支架所受的力。驱动底盘包括连接杆和移动座,连接杆的两端分别向同侧的侧边延伸,并与移动座相连接,移动座用于安装驱动轮和驱动电机,支撑臂固定于所述移动座的其中一个上,连接杆的长度不小于升降装置的水平长度。控制器用于控制驱动电机,

一种全向智能移位机.pdf
本发明公开了一种全向智能移位机,头部安装在躯干上,躯干固定在底盘的一端;躯干内设有总控制器,躯干上设有通过手臂旋转轴连接的左手臂和右手臂,手臂旋转轴与总控制器连接,用于控制左手臂和右手臂的移动;左手臂与右手臂之间安装有用于吊装病人的吊带;吊带上安装有与总控制器连接的吊带控制模块;底盘的底部设有数个全向轮驱动单元,每个全向轮驱动单元与总控制器连接,控制移位机进行全向转动。可见,可根据护工对吊带施加的作用力方向和大小,调整左手臂与右手臂的高度,以使病人在移动过程中更加舒适,并减轻护工在日常工作中移动老人的劳动

智能移位机.pdf
本发明公开了一种智能移位机,该机的垂直运动滑轮组件安装在导轨立柱的槽内,其上端安装有悬臂梁,其下端连接垂直电动推杆;悬臂梁上安装有2个起吊支架;导轨立柱的另一侧面安装有电气操控装置、手扶架;电气操控装置上的遥控器上设有四个功能按键,分别用来控制悬臂梁的升降和支腿的开合;立柱固定套焊接在水平下连接梁侧面;该梁左右两侧各安装有一个支腿旋转轴;支腿旋转轴连接有支腿;支腿的前、后端各连接有万向脚轮;支腿的中部安装有开合连接装置。本发明在起吊方式方式上采用“单力臂平行”受力方式,避免了起吊带对病人进行挤压而带来的二
一种智能多功能移位机.pdf
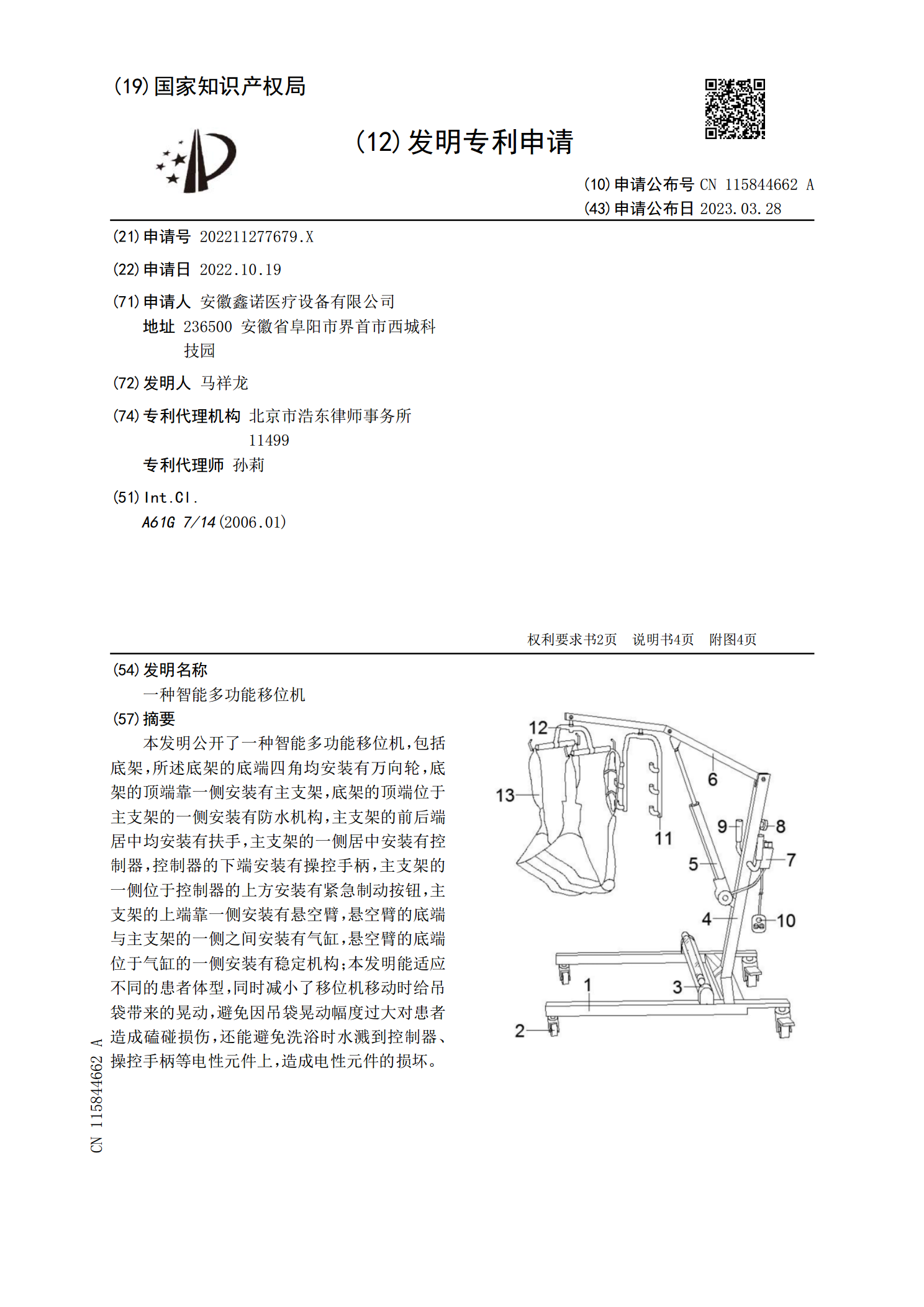
本发明公开了一种智能多功能移位机,包括底架,所述底架的底端四角均安装有万向轮,底架的顶端靠一侧安装有主支架,底架的顶端位于主支架的一侧安装有防水机构,主支架的前后端居中均安装有扶手,主支架的一侧居中安装有控制器,控制器的下端安装有操控手柄,主支架的一侧位于控制器的上方安装有紧急制动按钮,主支架的上端靠一侧安装有悬空臂,悬空臂的底端与主支架的一侧之间安装有气缸,悬空臂的底端位于气缸的一侧安装有稳定机构;本发明能适应不同的患者体型,同时减小了移位机移动时给吊袋带来的晃动,避免因吊袋晃动幅度过大对患者造成磕碰损
一种移位机.pdf
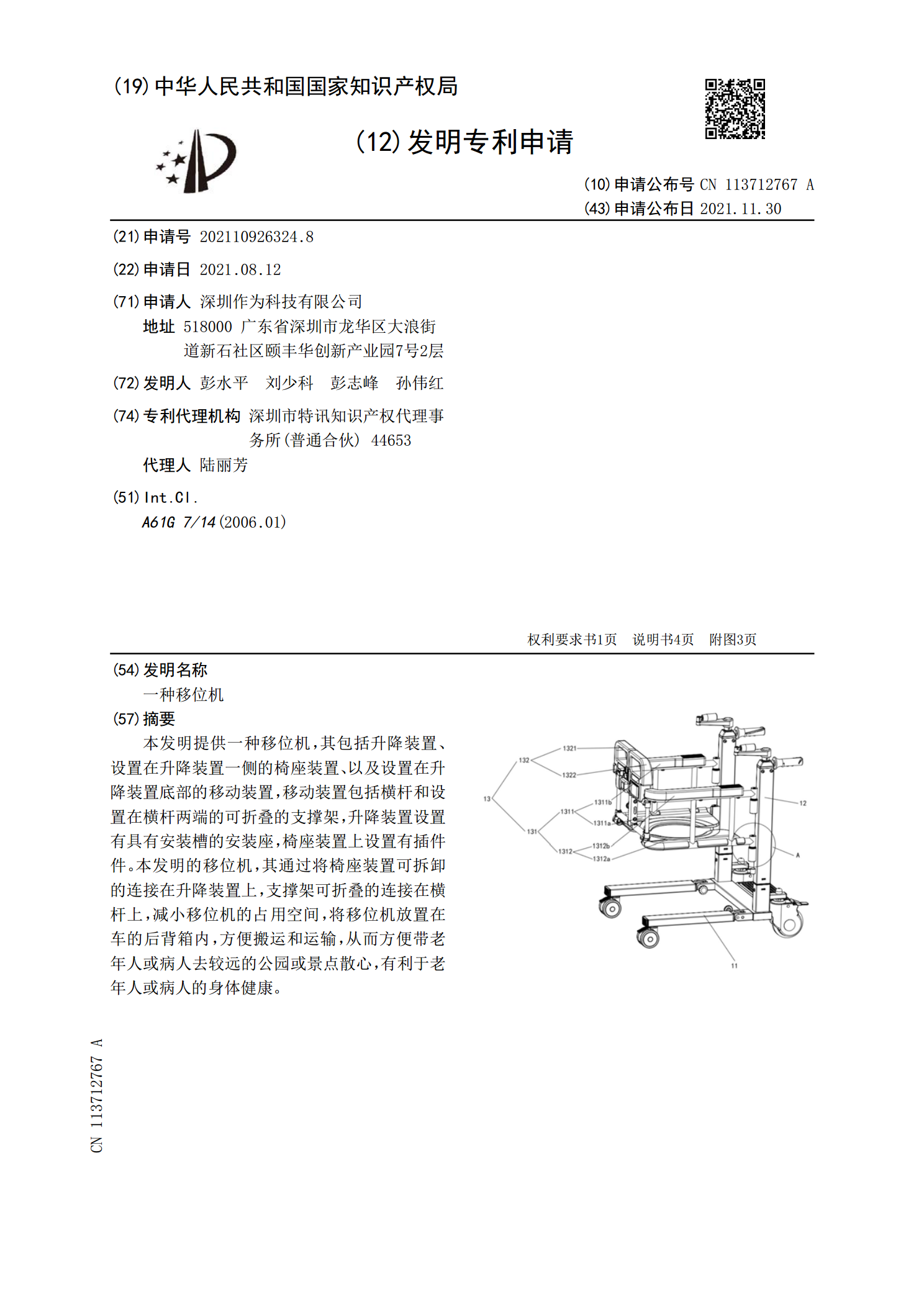
本发明提供一种移位机,其包括升降装置、设置在升降装置一侧的椅座装置、以及设置在升降装置底部的移动装置,移动装置包括横杆和设置在横杆两端的可折叠的支撑架,升降装置设置有具有安装槽的安装座,椅座装置上设置有插件件。本发明的移位机,其通过将椅座装置可拆卸的连接在升降装置上,支撑架可折叠的连接在横杆上,减小移位机的占用空间,将移位机放置在车的后背箱内,方便搬运和运输,从而方便带老年人或病人去较远的公园或景点散心,有利于老年人或病人的身体健康。