
位置推测装置.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
位置推测装置以及位置推测方法.pdf
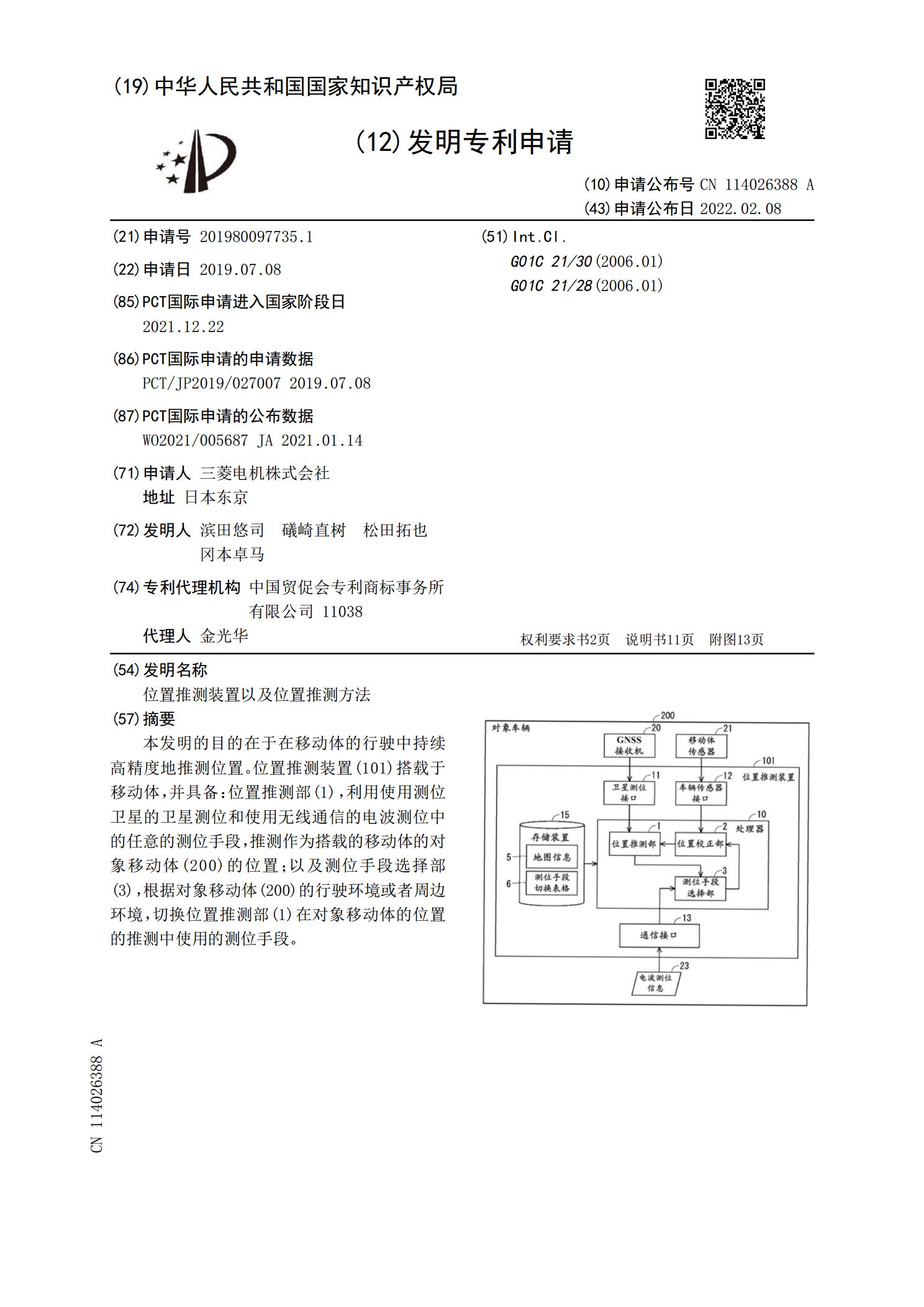
本发明的目的在于在移动体的行驶中持续高精度地推测位置。位置推测装置(101)搭载于移动体,并具备:位置推测部(1),利用使用测位卫星的卫星测位和使用无线通信的电波测位中的任意的测位手段,推测作为搭载的移动体的对象移动体(200)的位置;以及测位手段选择部(3),根据对象移动体(200)的行驶环境或者周边环境,切换位置推测部(1)在对象移动体的位置的推测中使用的测位手段。

位置推测装置.pdf
本发明提供一种通过校正参数来进一步提高位置推测精度的位置推测装置。该位置推测装置包括:获取部,其获取与移动体的多个车轮的旋转有关的信息即多个车轮旋转信息、以及与对象物有关的对象物信息;以及推测部,其根据所述多个车轮旋转信息和预设的方向用参数,计算所述移动体的方向的变化即移动体方向偏差,并根据该移动体方向偏差计算所述移动体的方向,从而推测所述移动体的位置即移动体位置,并且,根据所述对象物信息,计算所述对象物相对于所述移动体的方向的变化即对象物方向偏差,并根据所述移动体方向偏差和所述对象物方向偏差来校正所述方

音符位置检测装置、电子乐器及音符位置推测方法.pdf
在本发明中,CPU从乐谱图像中检测小节线,按照每个小节分区,取得分区后的各小节的音符的配置范围。使用音符数据推测所取得的配置范围中的音符的位置,检测处于推测出的位置上的音符的匹配值及检测位置作为位置候选。从检测出的位置候选中将在音乐上不可能有的位置候选排除,将在其余之中一致系数最高的位置候选的检测位置判别为音符的位置。

认知功能推测装置、学习装置及认知功能推测方法.pdf
本发明的认知功能推测装置包括:获取车外信息的车外信息获取部(14);获取脸部信息的脸部信息获取部(11);获取生物信息的生物信息获取部(12);获取车辆信息的车辆信息获取部(13);基于车外信息提取车外信息特征量的车外信息特征量提取部(15);基于车外信息特征量提取脸部信息特征量的脸部信息特征量提取部(16);基于车外信息特征量提取生物信息特征量的生物信息特征量提取部(17);基于车外信息特征量提取车辆信息特征量的车辆信息特征量提取部(18);以及基于车外信息特征量、与脸部信息特征量、生物信息特征量和车辆

深度推测装置、方法及程序、图像处理装置、方法及程序.pdf
本发明提供一种深度推测装置、深度推测方法、深度推测程序、图像处理装置、图像处理方法及图像处理程序。轮廓确定部确定对象图像内的对象的轮廓。距离确定部求取对象的区域内的对象像素与轮廓的最短距离。深度值决定部根据该距离来决定上述对象像素的深度值。距离确定部能以对象像素的位置为中心,从该中心螺旋状地探索与轮廓的切点,来求取与轮廓的最短距离。