
一种高精确性减速驱动装置及其操作方法.pdf

书生****ma

1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高精确性减速驱动装置及其操作方法.pdf
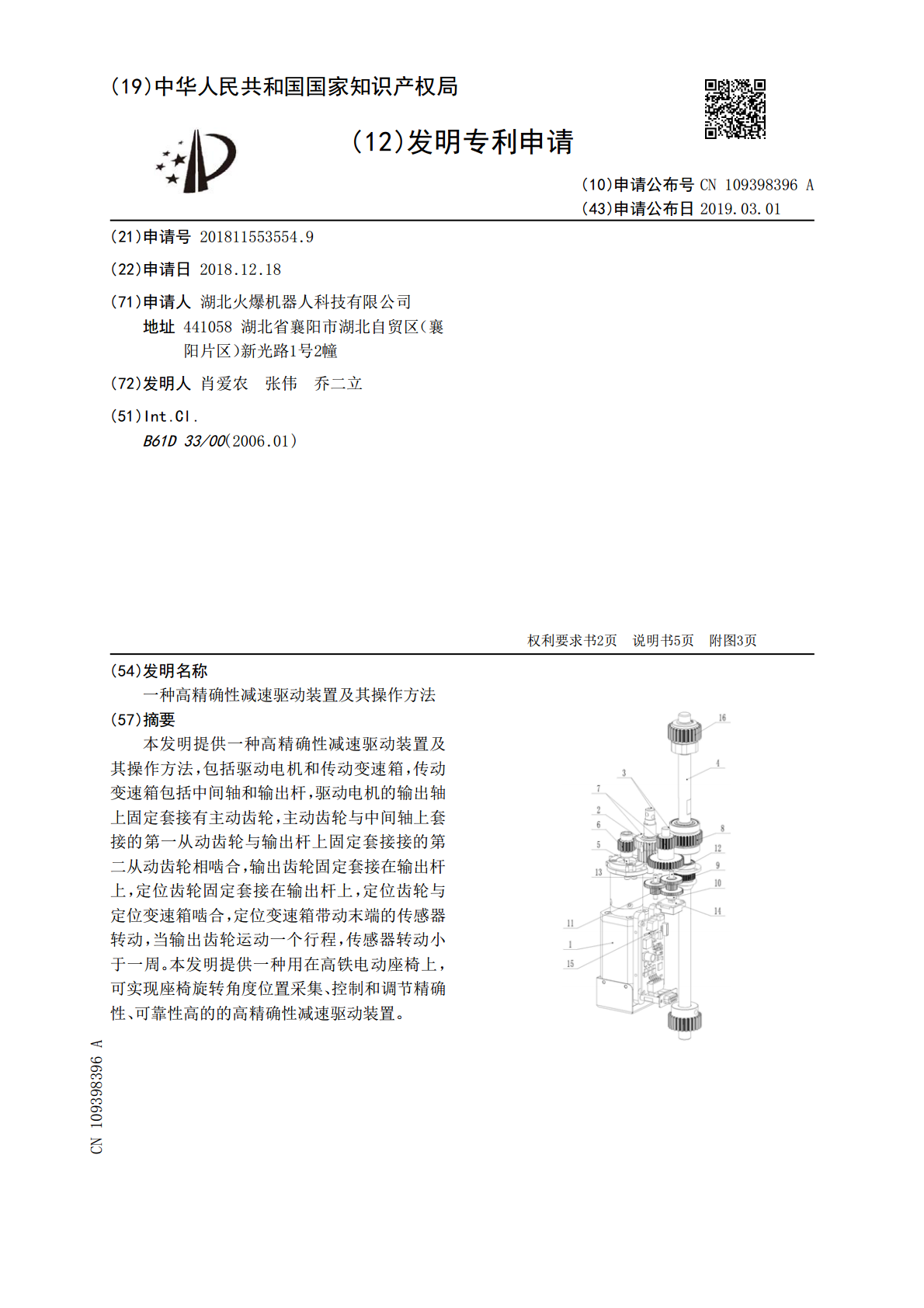
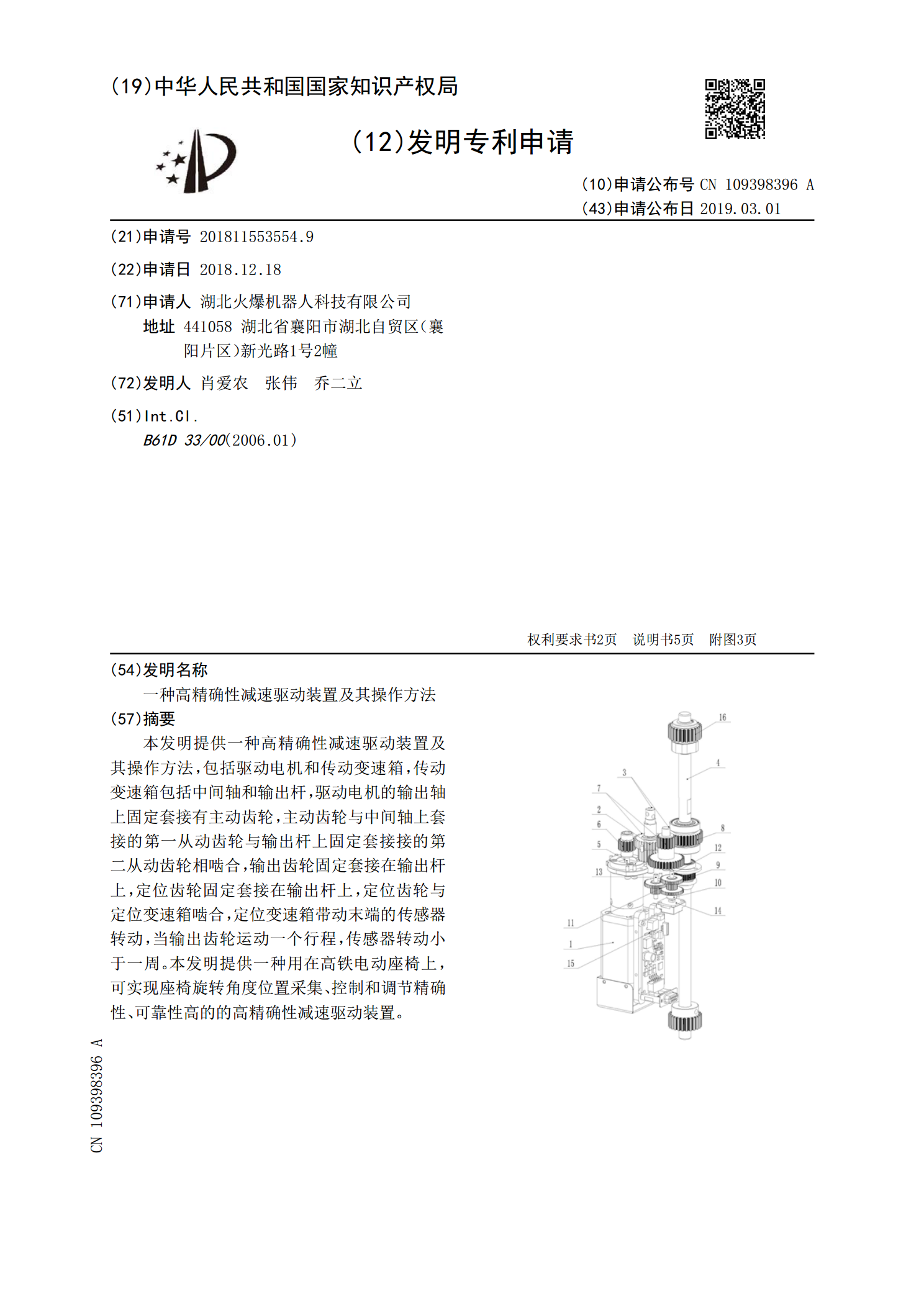
本发明提供一种高精确性减速驱动装置及其操作方法,包括驱动电机和传动变速箱,传动变速箱包括中间轴和输出杆,驱动电机的输出轴上固定套接有主动齿轮,主动齿轮与中间轴上套接的第一从动齿轮与输出杆上固定套接接的第二从动齿轮相啮合,输出齿轮固定套接在输出杆上,定位齿轮固定套接在输出杆上,定位齿轮与定位变速箱啮合,定位变速箱带动末端的传感器转动,当输出齿轮运动一个行程,传感器转动小于一周。本发明提供一种用在高铁电动座椅上,可实现座椅旋转角度位置采集、控制和调节精确性、可靠性高的的高精确性减速驱动装置。
一种减速驱动装置及其操作方法.pdf
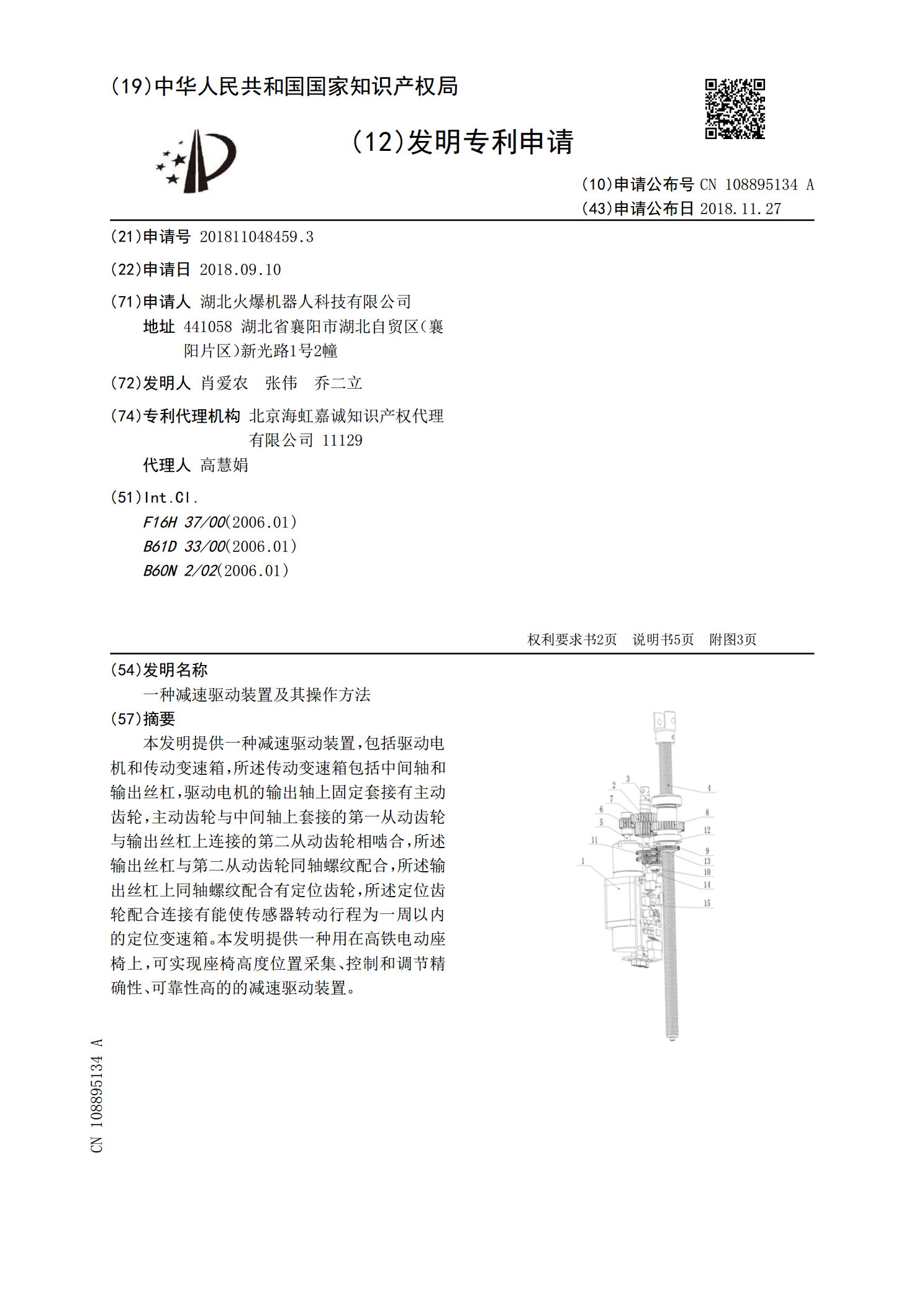
本发明提供一种减速驱动装置,包括驱动电机和传动变速箱,所述传动变速箱包括中间轴和输出丝杠,驱动电机的输出轴上固定套接有主动齿轮,主动齿轮与中间轴上套接的第一从动齿轮与输出丝杠上连接的第二从动齿轮相啮合,所述输出丝杠与第二从动齿轮同轴螺纹配合,所述输出丝杠上同轴螺纹配合有定位齿轮,所述定位齿轮配合连接有能使传感器转动行程为一周以内的定位变速箱。本发明提供一种用在高铁电动座椅上,可实现座椅高度位置采集、控制和调节精确性、可靠性高的的减速驱动装置。
一种驱动装置及其减速机构.pdf
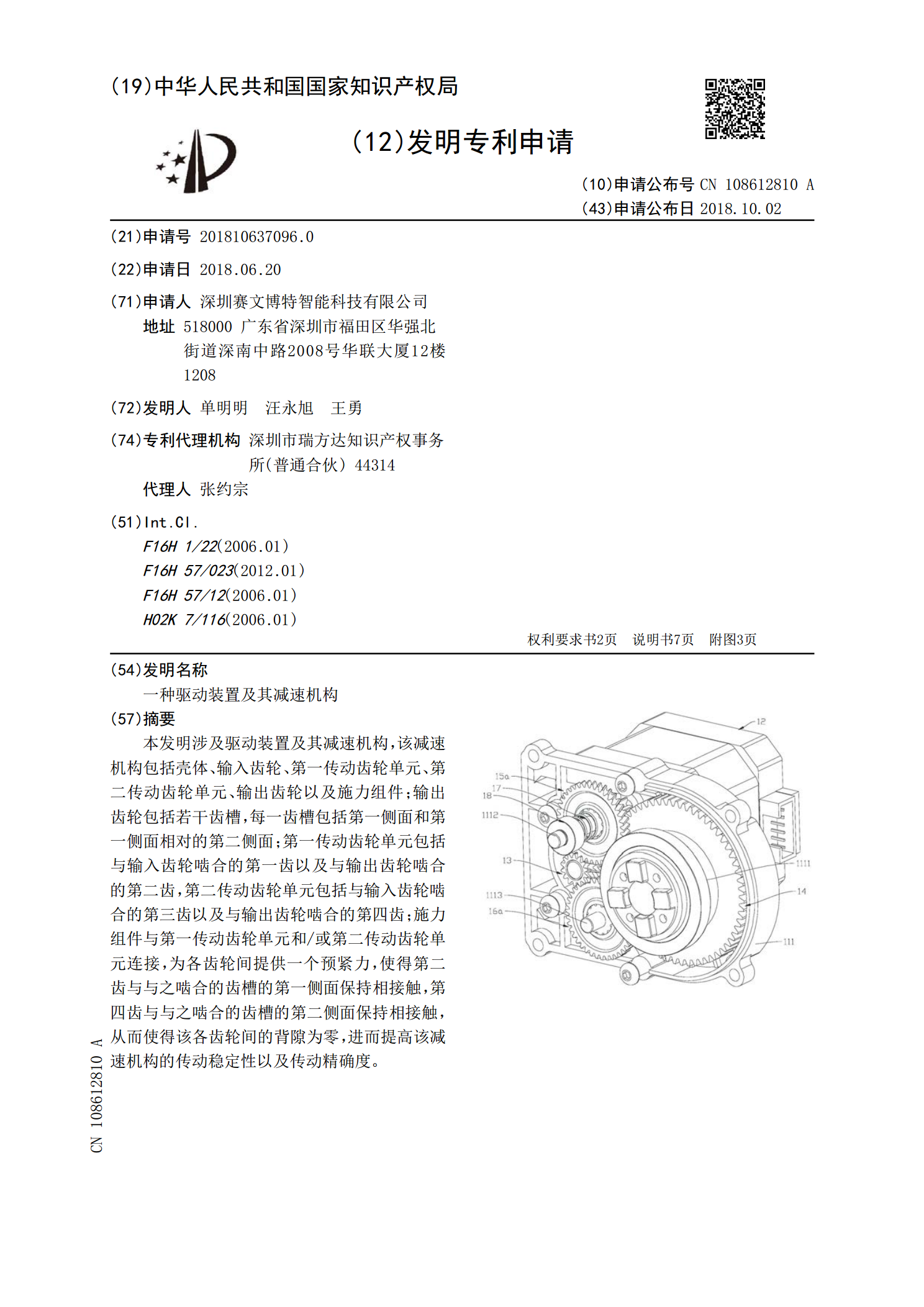
本发明涉及驱动装置及其减速机构,该减速机构包括壳体、输入齿轮、第一传动齿轮单元、第二传动齿轮单元、输出齿轮以及施力组件;输出齿轮包括若干齿槽,每一齿槽包括第一侧面和第一侧面相对的第二侧面;第一传动齿轮单元包括与输入齿轮啮合的第一齿以及与输出齿轮啮合的第二齿,第二传动齿轮单元包括与输入齿轮啮合的第三齿以及与输出齿轮啮合的第四齿;施力组件与第一传动齿轮单元和/或第二传动齿轮单元连接,为各齿轮间提供一个预紧力,使得第二齿与与之啮合的齿槽的第一侧面保持相接触,第四齿与与之啮合的齿槽的第二侧面保持相接触,从而使得该
一种减速驱动装置.pdf
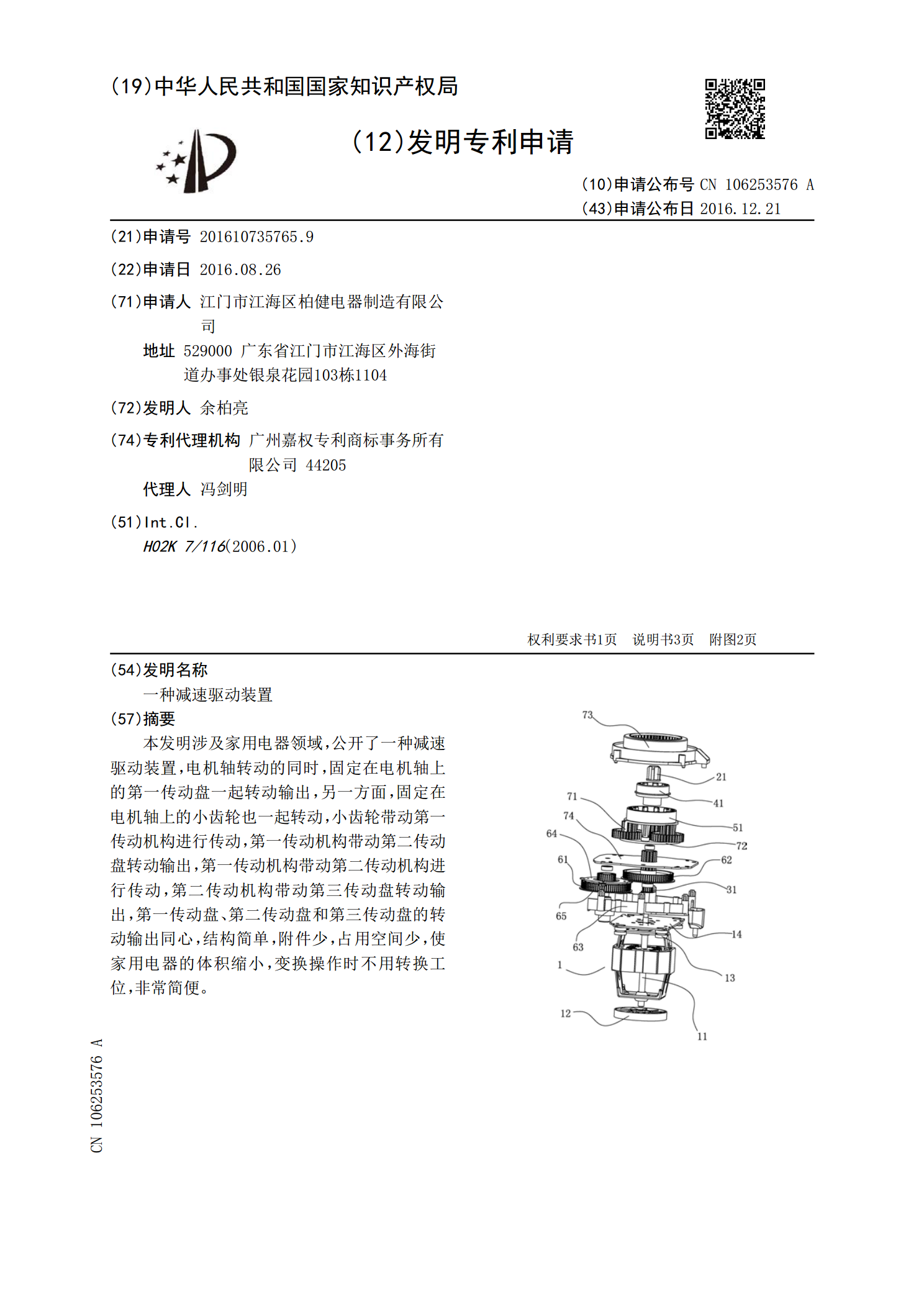
本发明涉及家用电器领域,公开了一种减速驱动装置,电机轴转动的同时,固定在电机轴上的第一传动盘一起转动输出,另一方面,固定在电机轴上的小齿轮也一起转动,小齿轮带动第一传动机构进行传动,第一传动机构带动第二传动盘转动输出,第一传动机构带动第二传动机构进行传动,第二传动机构带动第三传动盘转动输出,第一传动盘、第二传动盘和第三传动盘的转动输出同心,结构简单,附件少,占用空间少,使家用电器的体积缩小,变换操作时不用转换工位,非常简便。

显示面板的驱动装置及其操作方法.pdf
本发明提供一种驱动装置包括重排序电路以及源极驱动电路。重排序电路对输入数据串的多个子像素数据进行重排序而产生经重排序数据串,以减少目标数据线的颜色切换次数。源极驱动电路耦接至重排序电路,以接收经重排序数据串。源极驱动电路根据经重排序数据串驱动显示面板的目标数据线。