
车辆检测方法、装置、设备和介质.pdf

听云****君哇

1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆检测方法、装置、设备和介质.pdf
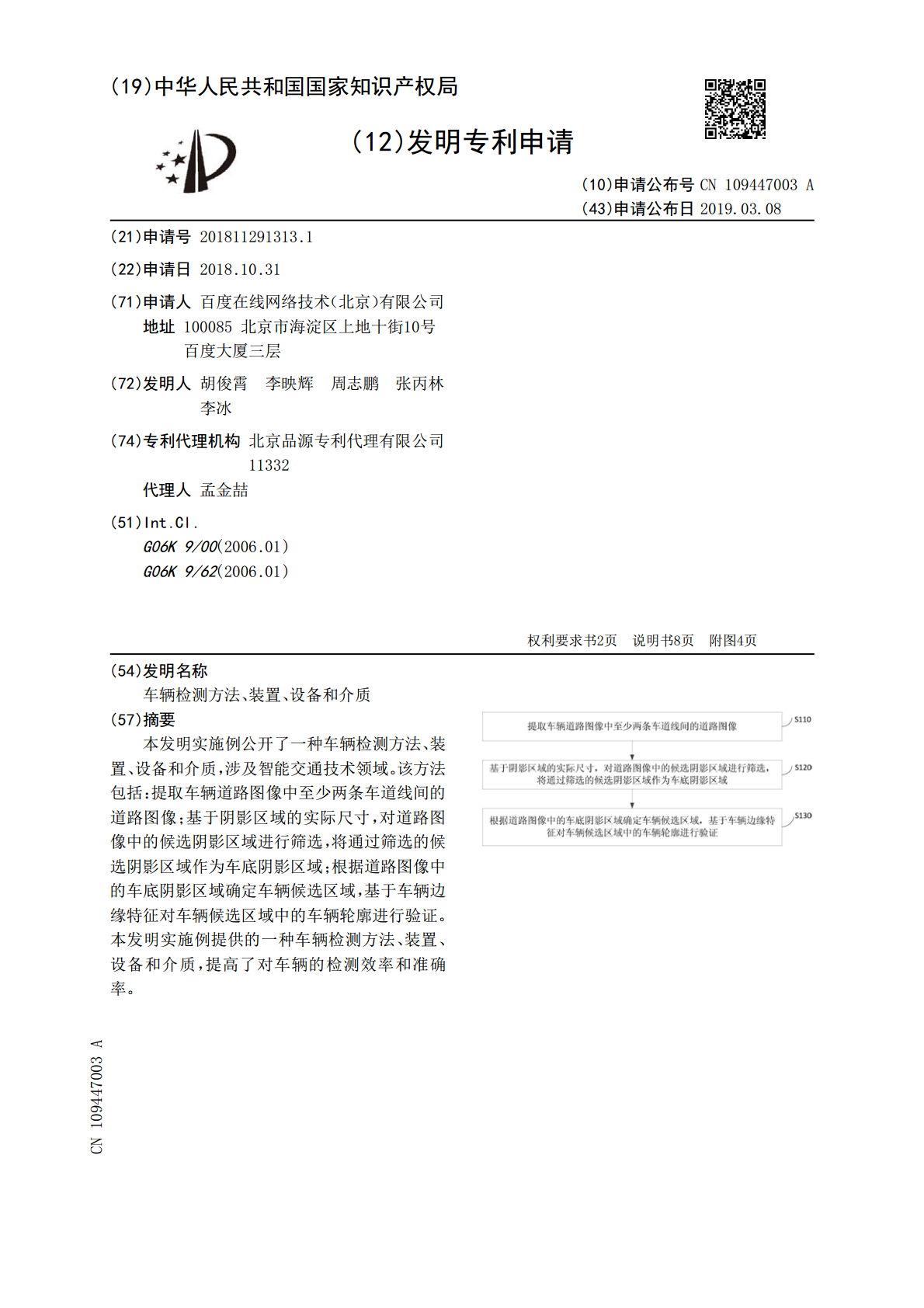
本发明实施例公开了一种车辆检测方法、装置、设备和介质,涉及智能交通技术领域。该方法包括:提取车辆道路图像中至少两条车道线间的道路图像;基于阴影区域的实际尺寸,对道路图像中的候选阴影区域进行筛选,将通过筛选的候选阴影区域作为车底阴影区域;根据道路图像中的车底阴影区域确定车辆候选区域,基于车辆边缘特征对车辆候选区域中的车辆轮廓进行验证。本发明实施例提供的一种车辆检测方法、装置、设备和介质,提高了对车辆的检测效率和准确率。
车辆控制方法和装置、介质、设备.pdf
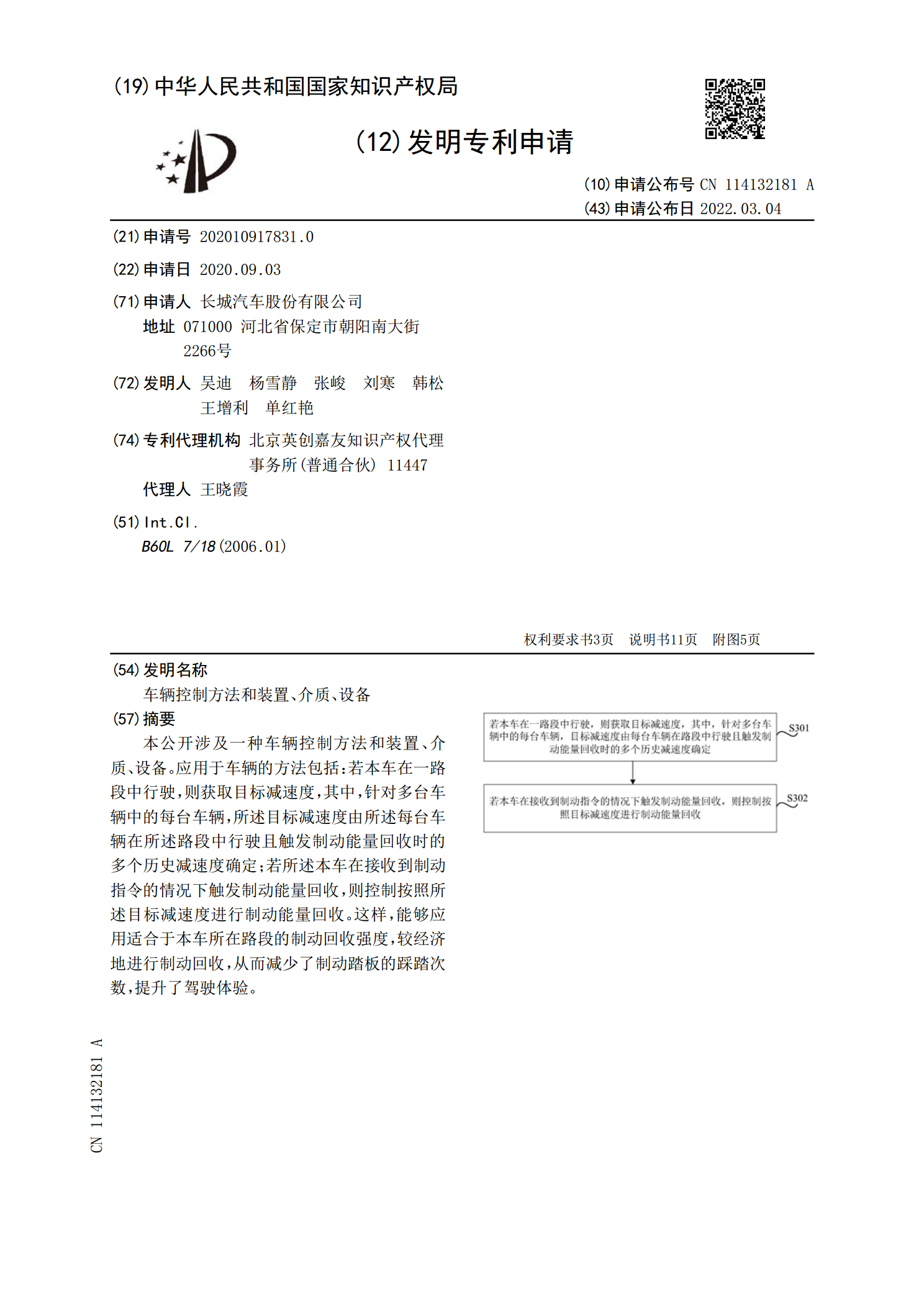
本公开涉及一种车辆控制方法和装置、介质、设备。应用于车辆的方法包括:若本车在一路段中行驶,则获取目标减速度,其中,针对多台车辆中的每台车辆,所述目标减速度由所述每台车辆在所述路段中行驶且触发制动能量回收时的多个历史减速度确定;若所述本车在接收到制动指令的情况下触发制动能量回收,则控制按照所述目标减速度进行制动能量回收。这样,能够应用适合于本车所在路段的制动回收强度,较经济地进行制动回收,从而减少了制动踏板的踩踏次数,提升了驾驶体验。

整车平台建模、车辆性能检测的方法、装置、设备和介质.pdf
本公开提供了一种整车平台模型建模、车辆性能检测的方法、装置、设备和介质,属于车辆仿真领域。所述方法包括:建立路面模型,所述路面模型包括路面上各个区域的平整度;获取方向盘的转角和车轮转动的动力;建立以所述路面模型、所述方向盘的转角和所述车轮转动的动力作为输入的整车平台模型。本公开的整车平台模型同时考虑到车辆行驶路面、速度和转向这些车辆在行驶过程中可能遇到的变化,因此整车平台模型模拟出的车辆状态更接近车辆在现实场景中行驶的状态。整车平台模型的仿真效果较高,有利于准确研究车辆的性能,特别是平顺性和操作稳定性。
车辆异常检测方法、装置、设备及存储介质.pdf
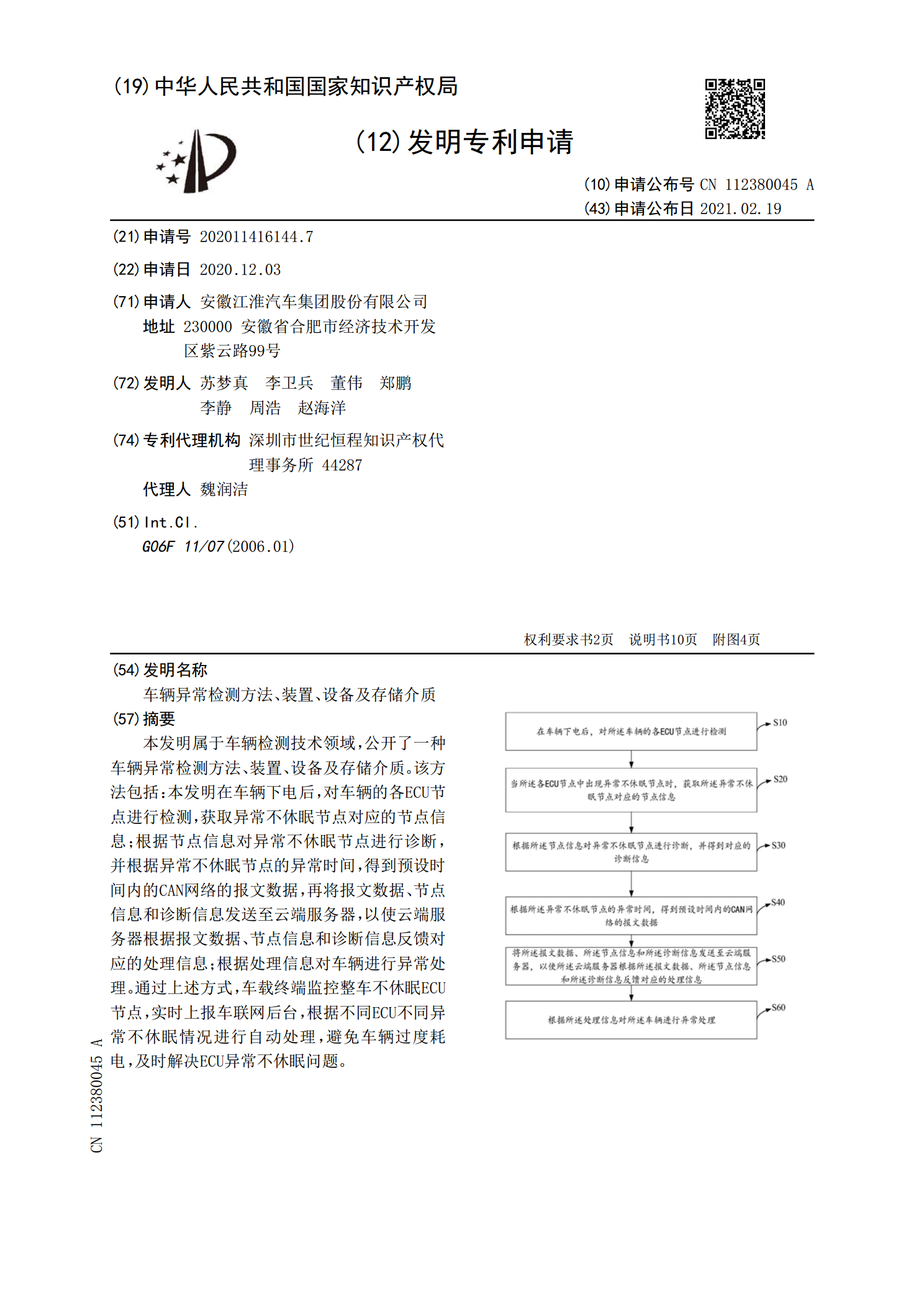
本发明属于车辆检测技术领域,公开了一种车辆异常检测方法、装置、设备及存储介质。该方法包括:本发明在车辆下电后,对车辆的各ECU节点进行检测,获取异常不休眠节点对应的节点信息;根据节点信息对异常不休眠节点进行诊断,并根据异常不休眠节点的异常时间,得到预设时间内的CAN网络的报文数据,再将报文数据、节点信息和诊断信息发送至云端服务器,以使云端服务器根据报文数据、节点信息和诊断信息反馈对应的处理信息;根据处理信息对车辆进行异常处理。通过上述方式,车载终端监控整车不休眠ECU节点,实时上报车联网后台,根据不同EC

车辆漏水检测方法、装置、设备及存储介质.pdf
本发明属于车辆安全技术领域,公开了一种车辆漏水检测方法、装置、设备及存储介质。本发明通过在车辆满足漏水检测条件时,获取车辆的位置信息及车辆内外湿度;根据位置信息查找对应的第一湿度判定值及第二湿度判定值;根据车辆内外湿度计算漏水检测值;基于漏水检测值、第一湿度判定值及第二湿度判定值检测车辆是否漏水。由于会根据车辆的车辆内外湿度计算漏水检测值,并将漏水检测值与根据位置信息查找到的第一湿度判定值及第二湿度判定值进行比较,根据比较结果即可车辆的内外湿度差异是否处于正常范围内,从而快速确定车辆是否漏水。