
一种防止物品掉落的堆垛机器人.pdf

冬易****娘子


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种防止物品掉落的堆垛机器人.pdf
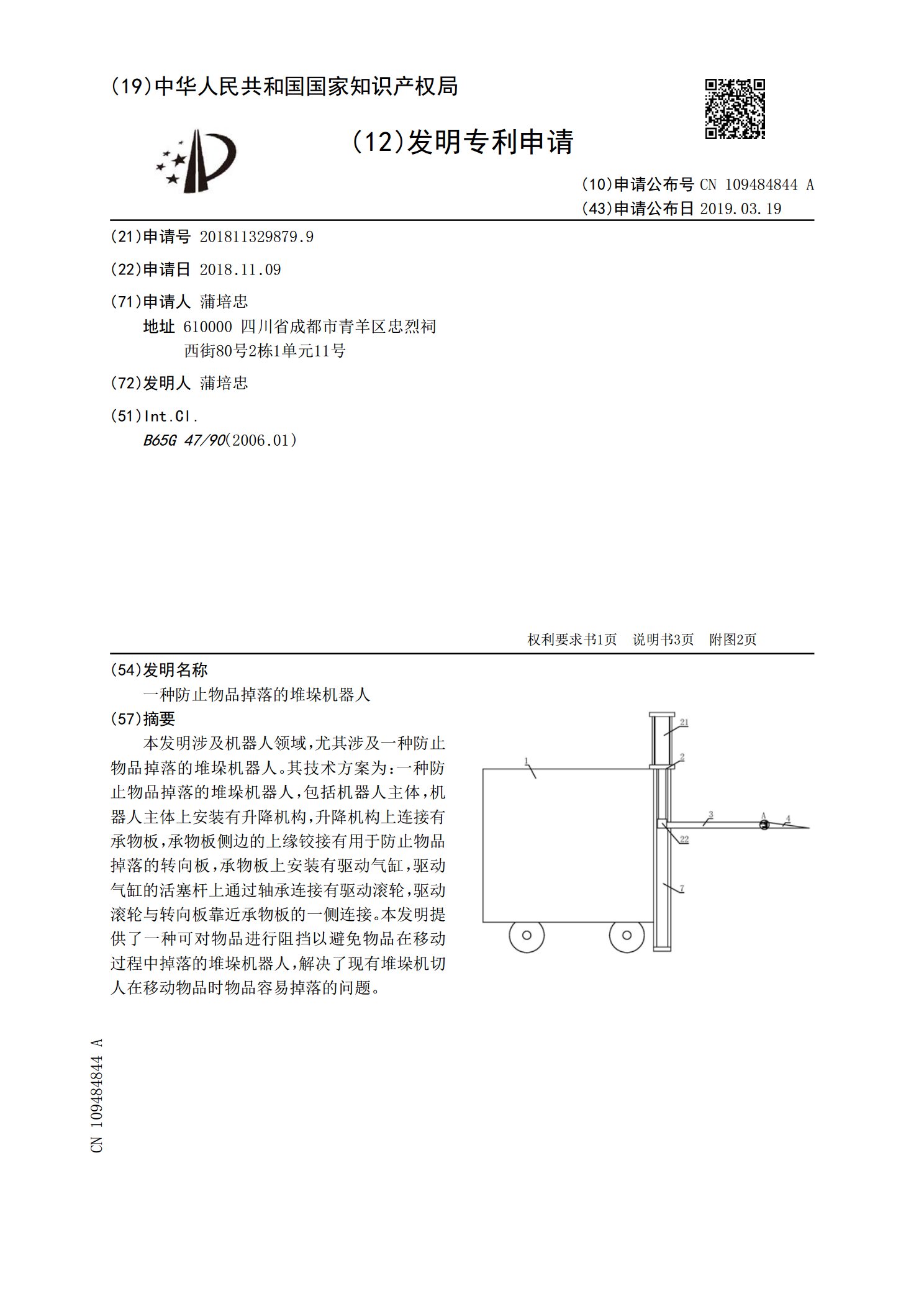
本发明涉及机器人领域,尤其涉及一种防止物品掉落的堆垛机器人。其技术方案为:一种防止物品掉落的堆垛机器人,包括机器人主体,机器人主体上安装有升降机构,升降机构上连接有承物板,承物板侧边的上缘铰接有用于防止物品掉落的转向板,承物板上安装有驱动气缸,驱动气缸的活塞杆上通过轴承连接有驱动滚轮,驱动滚轮与转向板靠近承物板的一侧连接。本发明提供了一种可对物品进行阻挡以避免物品在移动过程中掉落的堆垛机器人,解决了现有堆垛机切人在移动物品时物品容易掉落的问题。
一种防止物品掉落的纺织推车.pdf
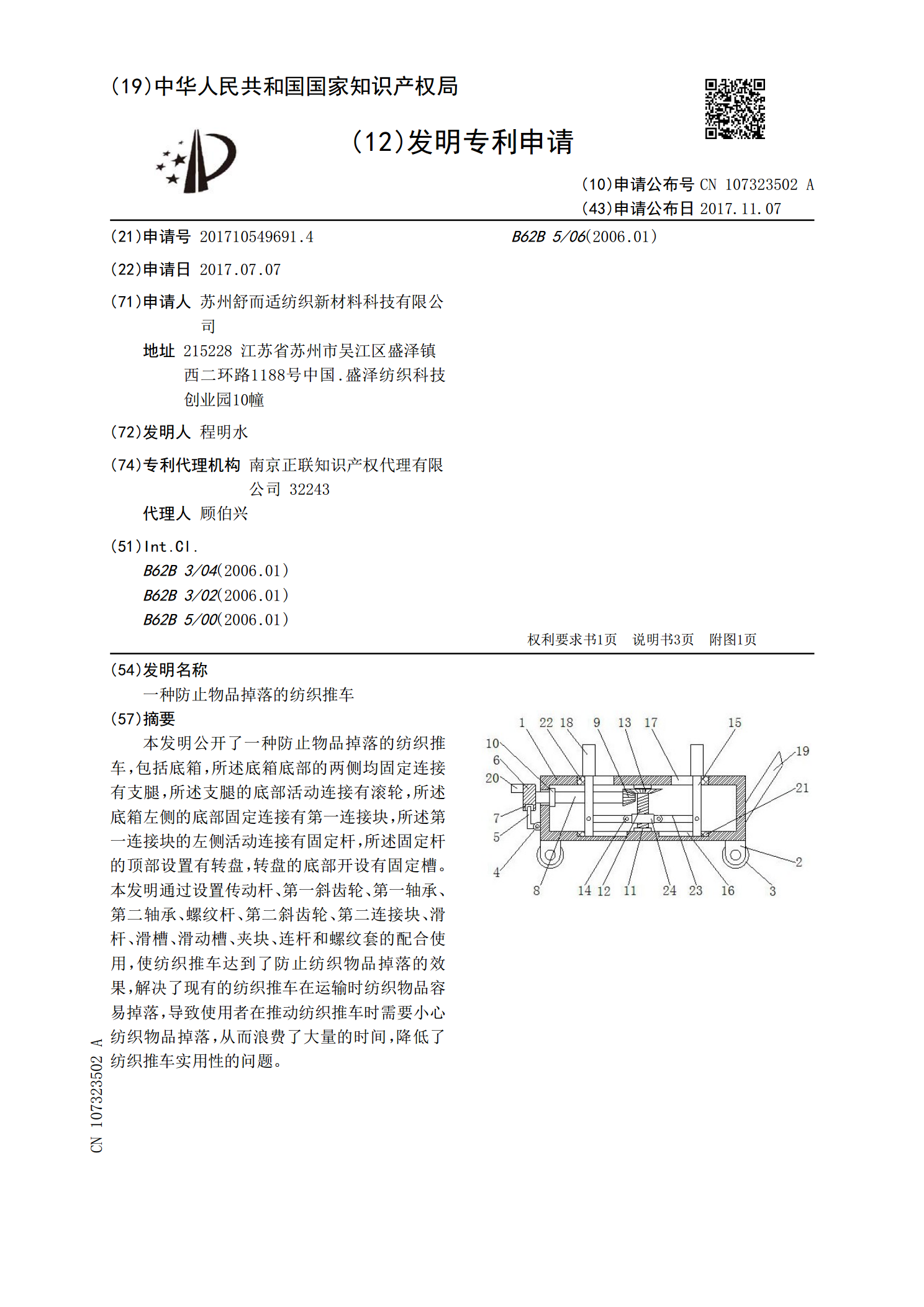
本发明公开了一种防止物品掉落的纺织推车,包括底箱,所述底箱底部的两侧均固定连接有支腿,所述支腿的底部活动连接有滚轮,所述底箱左侧的底部固定连接有第一连接块,所述第一连接块的左侧活动连接有固定杆,所述固定杆的顶部设置有转盘,转盘的底部开设有固定槽。本发明通过设置传动杆、第一斜齿轮、第一轴承、第二轴承、螺纹杆、第二斜齿轮、第二连接块、滑杆、滑槽、滑动槽、夹块、连杆和螺纹套的配合使用,使纺织推车达到了防止纺织物品掉落的效果,解决了现有的纺织推车在运输时纺织物品容易掉落,导致使用者在推动纺织推车时需要小心纺织物品

一种防止物品掉落的纺织推车.pdf
本发明公开了一种防止物品掉落的纺织推车,包括承载板,所述承载板的顶部设置有放置筐,所述放置筐与承载板之间设置有限位块,所述限位块内腔的顶部开设有限位槽,所述限位槽的内侧设置有第一支撑柱,所述第一支撑柱的顶部与放置筐固定连接,放置筐底部的右侧固定连接有第二支撑柱,第二支撑柱的左侧设置有固定块。本发明通过设置承载板、放置筐、限位块、限位槽、第一支撑柱、第二支撑柱、固定块、卡槽、外壳、拉环、圆柱、弹簧、滑板、滑槽、卡柱、通槽、安装座、支撑杆、推手和滚轮的相互配合,解决了现有的纺织推车不具备防止物品掉落的问题,该

一种防止倾倒的堆垛机机器人.pdf
本发明涉及机器人领域,尤其涉及一种防止倾倒的堆垛机机器人。其技术方案为:一种防止倾倒的堆垛机机器人,包括机器人主体,机器人主体上安装有承物升降机构,承物升降机构上连接有承物板;机器人主体上还连接有防倾升降机构,防倾升降机构上连接有支撑杆,支撑杆的另一端连接有弹簧,弹簧的另一端连接有支撑筒,弹簧和支撑杆均套设于支撑筒内,支撑筒上连接有滚轮。本发明提供了一种能在出现一定倾斜时通过自身可靠支撑来避免倾倒的堆垛机器人,解决了现有的堆垛机器人在移动过程中容易侧翻的问题。
一种防止物品掉落的新材料加工用运输设备.pdf
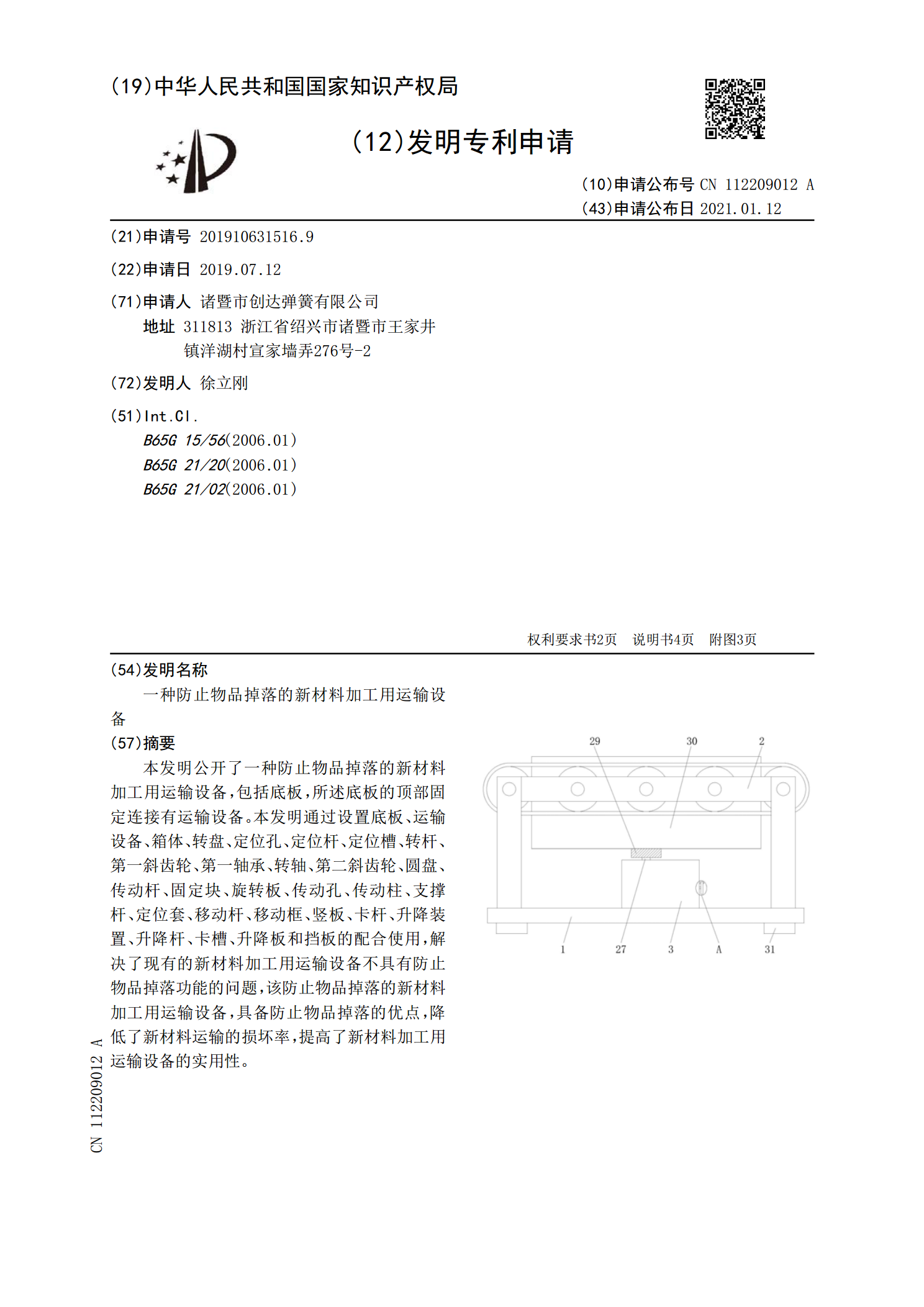
本发明公开了一种防止物品掉落的新材料加工用运输设备,包括底板,所述底板的顶部固定连接有运输设备。本发明通过设置底板、运输设备、箱体、转盘、定位孔、定位杆、定位槽、转杆、第一斜齿轮、第一轴承、转轴、第二斜齿轮、圆盘、传动杆、固定块、旋转板、传动孔、传动柱、支撑杆、定位套、移动杆、移动框、竖板、卡杆、升降装置、升降杆、卡槽、升降板和挡板的配合使用,解决了现有的新材料加工用运输设备不具有防止物品掉落功能的问题,该防止物品掉落的新材料加工用运输设备,具备防止物品掉落的优点,降低了新材料运输的损坏率,提高了新材料加