
一种低速大扭矩步进式执行系统.pdf

努力****采萍

1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种低速大扭矩步进式执行系统.pdf
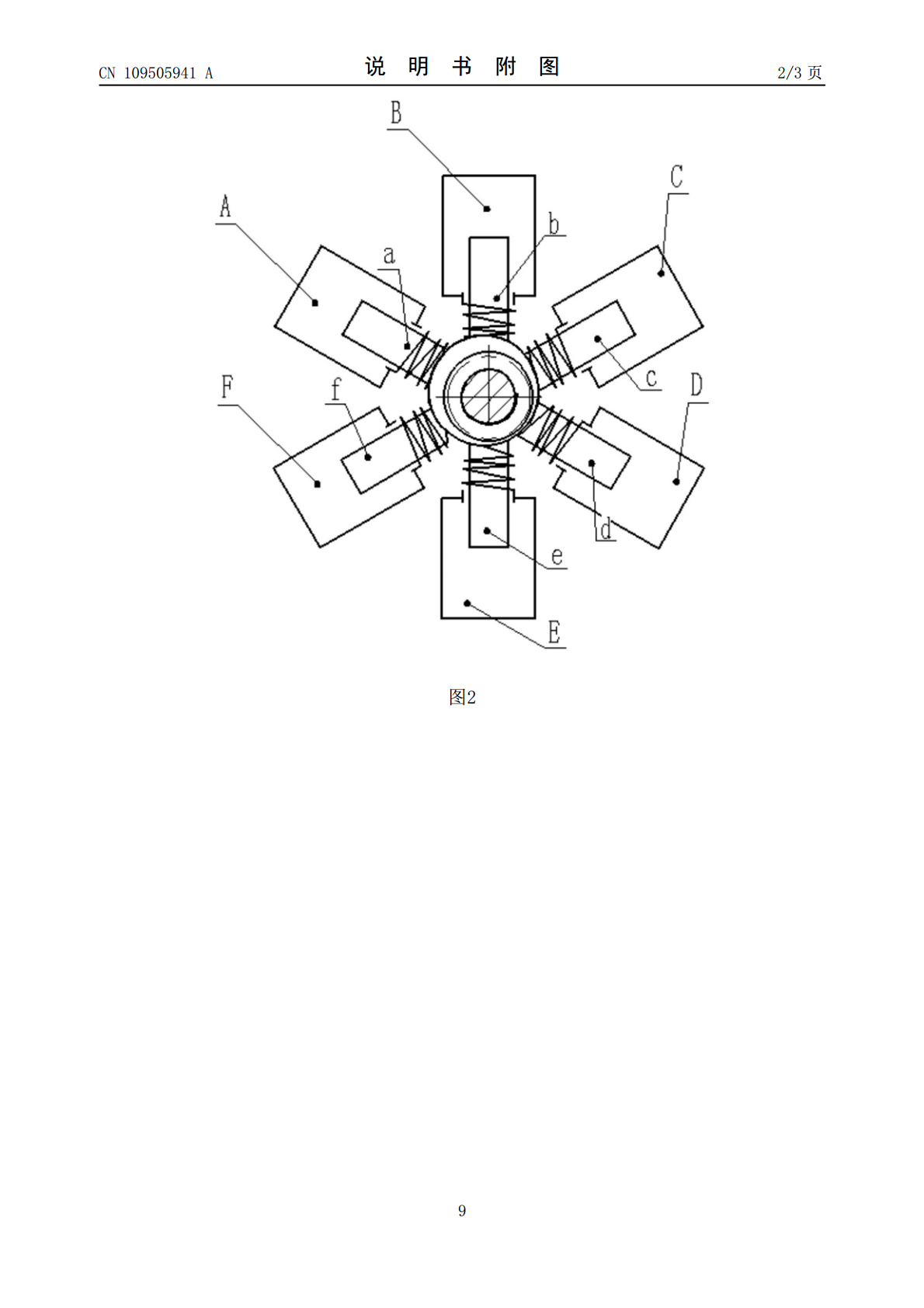
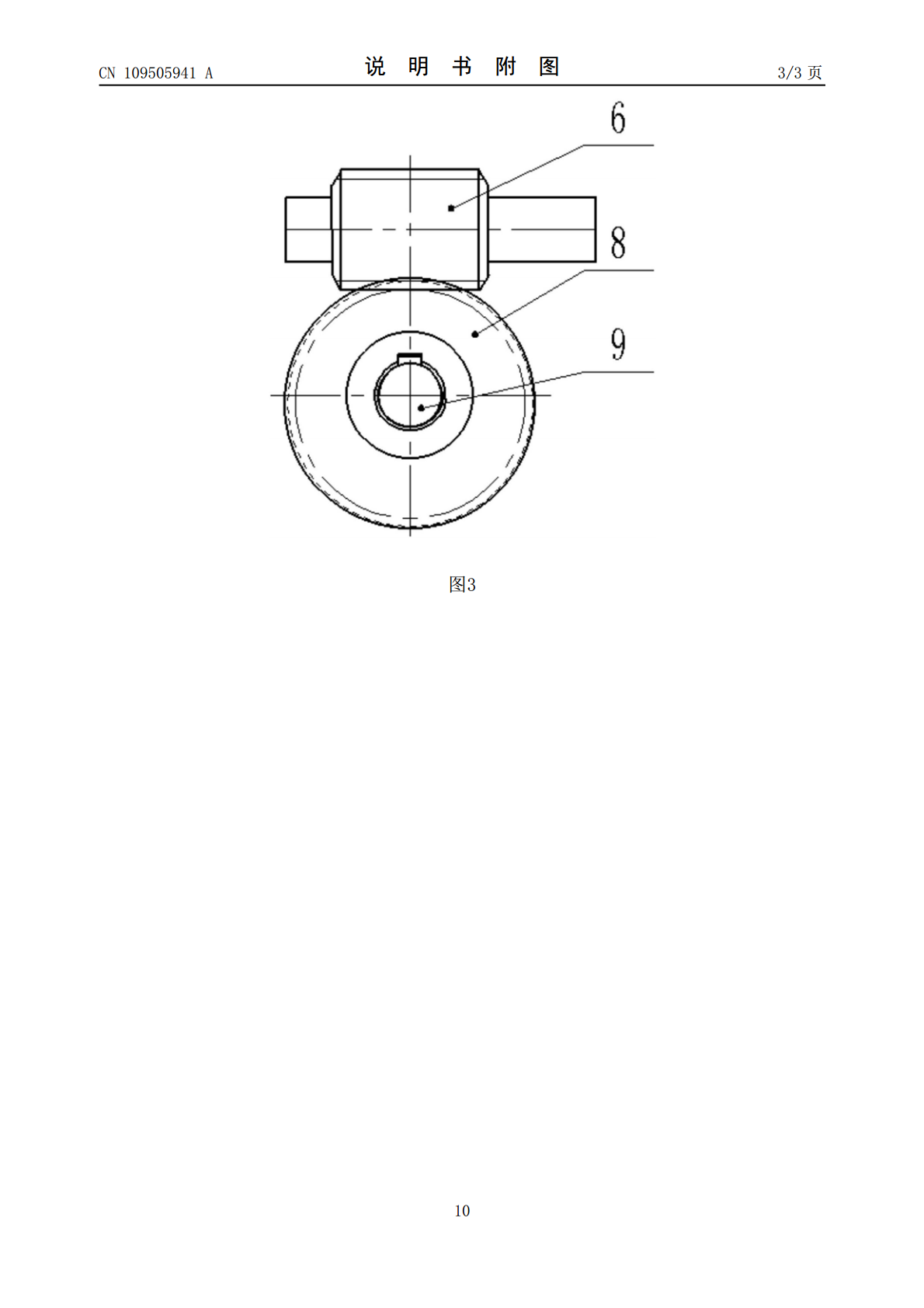
本发明公开了一种低速大扭矩的步进式执行系统。步进式执行机构在柱塞缸的作用下驱动带蜗杆传动轴做步进式运动,蜗轮蜗杆减速机构将步进式运动平稳平滑输出。多个柱塞缸沿偏心轮周向间隔均布安装,偏心轮套装在带蜗杆传动轴光轴部分上,偏心轮绕带蜗杆传动轴偏心旋转,带蜗杆传动轴的蜗杆部分和蜗轮啮合形成蜗轮蜗杆传动副,蜗轮的中心套装输出轴。每个柱塞缸均经两位三通电磁阀分别和油泵、油箱连接,多组柱塞缸的两位三通电磁阀连接到功率放大器、控制器,控制器通过切换两位三通电磁阀的端口实现对每组柱塞缸的控制。本发明相对于电机输出,其扭矩

一种盘式低速大扭矩永磁电机.pdf
本发明属于电机技术领域,尤其为一种盘式低速大扭矩永磁电机,包括外壳,所述外壳的底部安装有后盖,外壳内转动安装有转轴,转轴的顶端贯穿外壳并延伸至外壳外,转轴上固定套接有转子,转子的顶侧环形均匀安装有多个安装座,安装座的顶侧安装有磁钢,外壳的顶侧内壁上固定安装有定子,定子的底侧环形均匀安装有多个线包,线包与磁钢相对应,本发明在保证轴向距离同时,尽可能增加转子和定子的高度,从而增加线圈匝数、增大磁片厚度,增大了定子和转子的半径,使定子和转子可以容纳更多的磁极,进而加大电机的输出扭矩,代替传统的磁钢固定模式,便于

低速大扭矩马达.doc
低速大扭矩液压马达的使用与维护在工程机械、采矿机械、建筑机械等,经常采用低速大扭矩液压马达来驱动行走或提升机构。低速大扭矩液压马达有少数是轴向柱塞式,多数是径向柱塞式,径向柱塞液压马达由于可以自行平衡一部分甚至全部作用在其转子承受的高低压腔的液压作用力,加上这类马达的尺寸和质量较大,所以它的特点是传递扭矩大,可以在低速输出较大功率。这样,往往不需要或用极简单的减速装置即可与工作机构相连,从而简化了机器。目前,工矿企业使用的径向柱塞式低速大扭矩液压马达品种和类型很多,按其工作原理和结构形式可分为曲轴连杆式、
一种低速大扭矩永磁电机.pdf
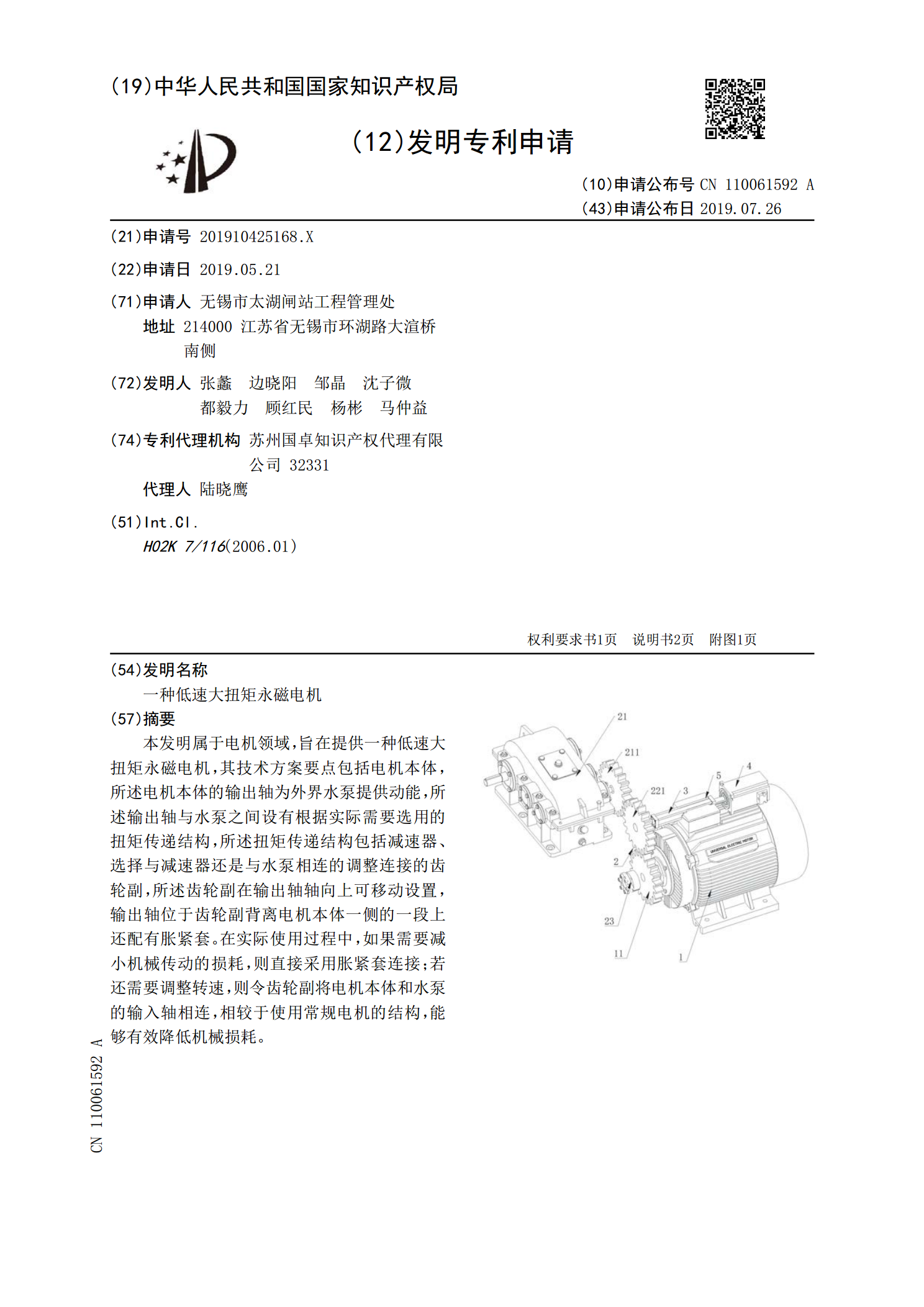
本发明属于电机领域,旨在提供一种低速大扭矩永磁电机,其技术方案要点包括电机本体,所述电机本体的输出轴为外界水泵提供动能,所述输出轴与水泵之间设有根据实际需要选用的扭矩传递结构,所述扭矩传递结构包括减速器、选择与减速器还是与水泵相连的调整连接的齿轮副,所述齿轮副在输出轴轴向上可移动设置,输出轴位于齿轮副背离电机本体一侧的一段上还配有胀紧套。在实际使用过程中,如果需要减小机械传动的损耗,则直接采用胀紧套连接;若还需要调整转速,则令齿轮副将电机本体和水泵的输入轴相连,相较于使用常规电机的结构,能够有效降低机械损
一种壳体旋转输出扭矩的内曲线低速大扭矩液压马达.pdf
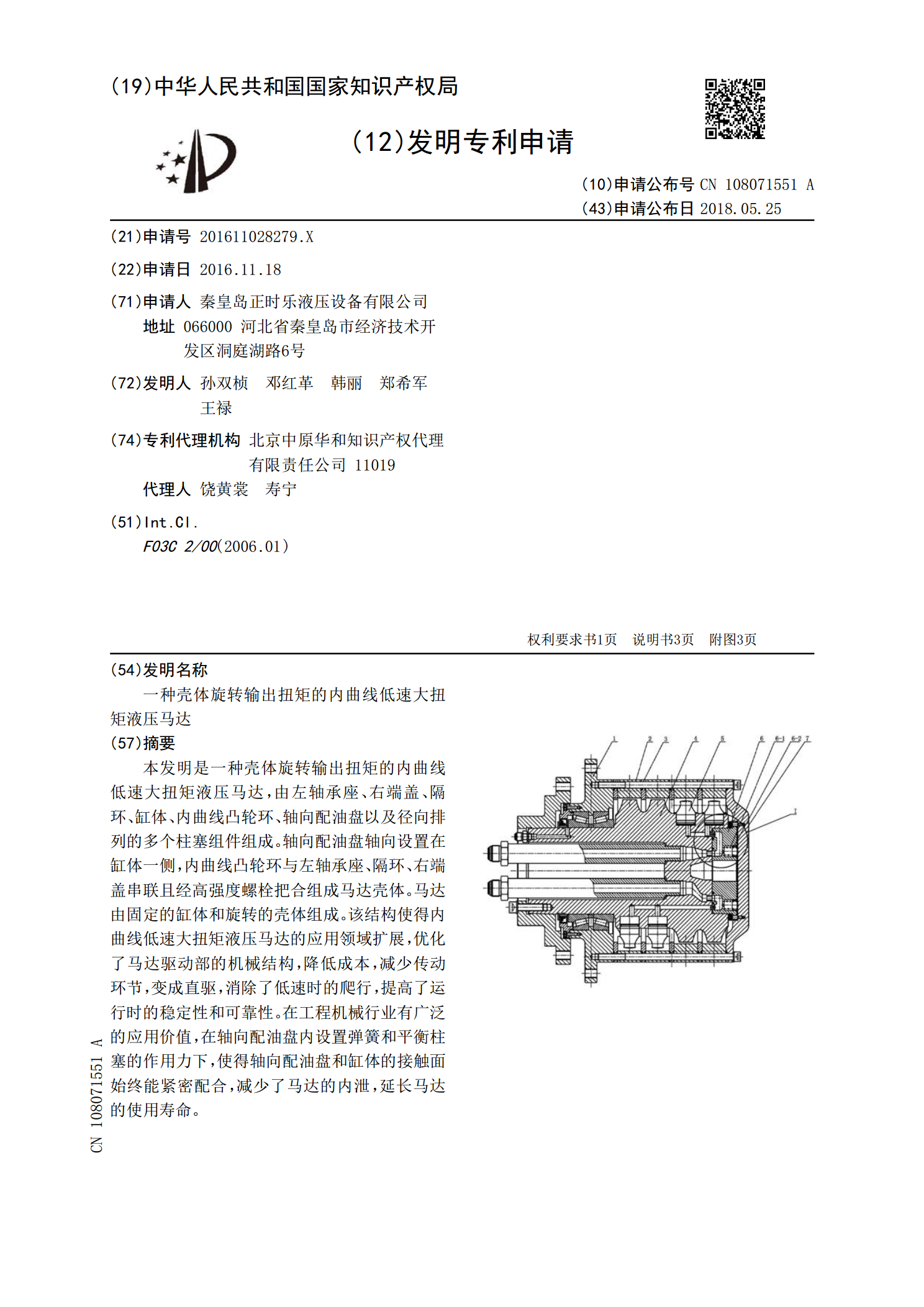
本发明是一种壳体旋转输出扭矩的内曲线低速大扭矩液压马达,由左轴承座、右端盖、隔环、缸体、内曲线凸轮环、轴向配油盘以及径向排列的多个柱塞组件组成。轴向配油盘轴向设置在缸体一侧,内曲线凸轮环与左轴承座、隔环、右端盖串联且经高强度螺栓把合组成马达壳体。马达由固定的缸体和旋转的壳体组成。该结构使得内曲线低速大扭矩液压马达的应用领域扩展,优化了马达驱动部的机械结构,降低成本,减少传动环节,变成直驱,消除了低速时的爬行,提高了运行时的稳定性和可靠性。在工程机械行业有广泛的应用价值,在轴向配油盘内设置弹簧和平衡柱塞的作