
一种分拣机器人.pdf

Th****s3

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种织物分拣机器人自主分拣方法.pdf
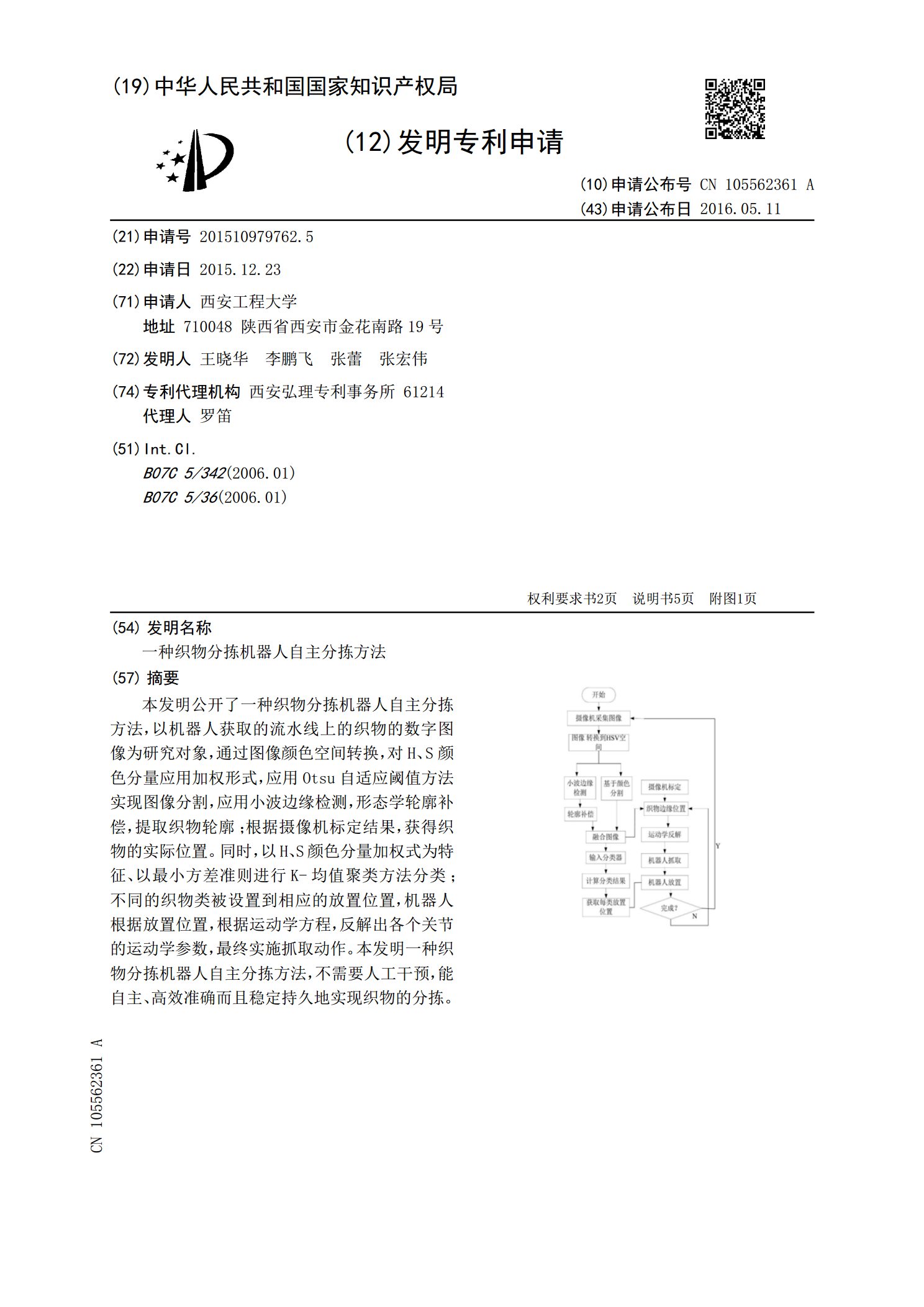
本发明公开了一种织物分拣机器人自主分拣方法,以机器人获取的流水线上的织物的数字图像为研究对象,通过图像颜色空间转换,对H、S颜色分量应用加权形式,应用Otsu自适应阈值方法实现图像分割,应用小波边缘检测,形态学轮廓补偿,提取织物轮廓;根据摄像机标定结果,获得织物的实际位置。同时,以H、S颜色分量加权式为特征、以最小方差准则进行K-均值聚类方法分类;不同的织物类被设置到相应的放置位置,机器人根据放置位置,根据运动学方程,反解出各个关节的运动学参数,最终实施抓取动作。本发明一种织物分拣机器人自主分拣方法,不需

一种分拣机器人.pdf
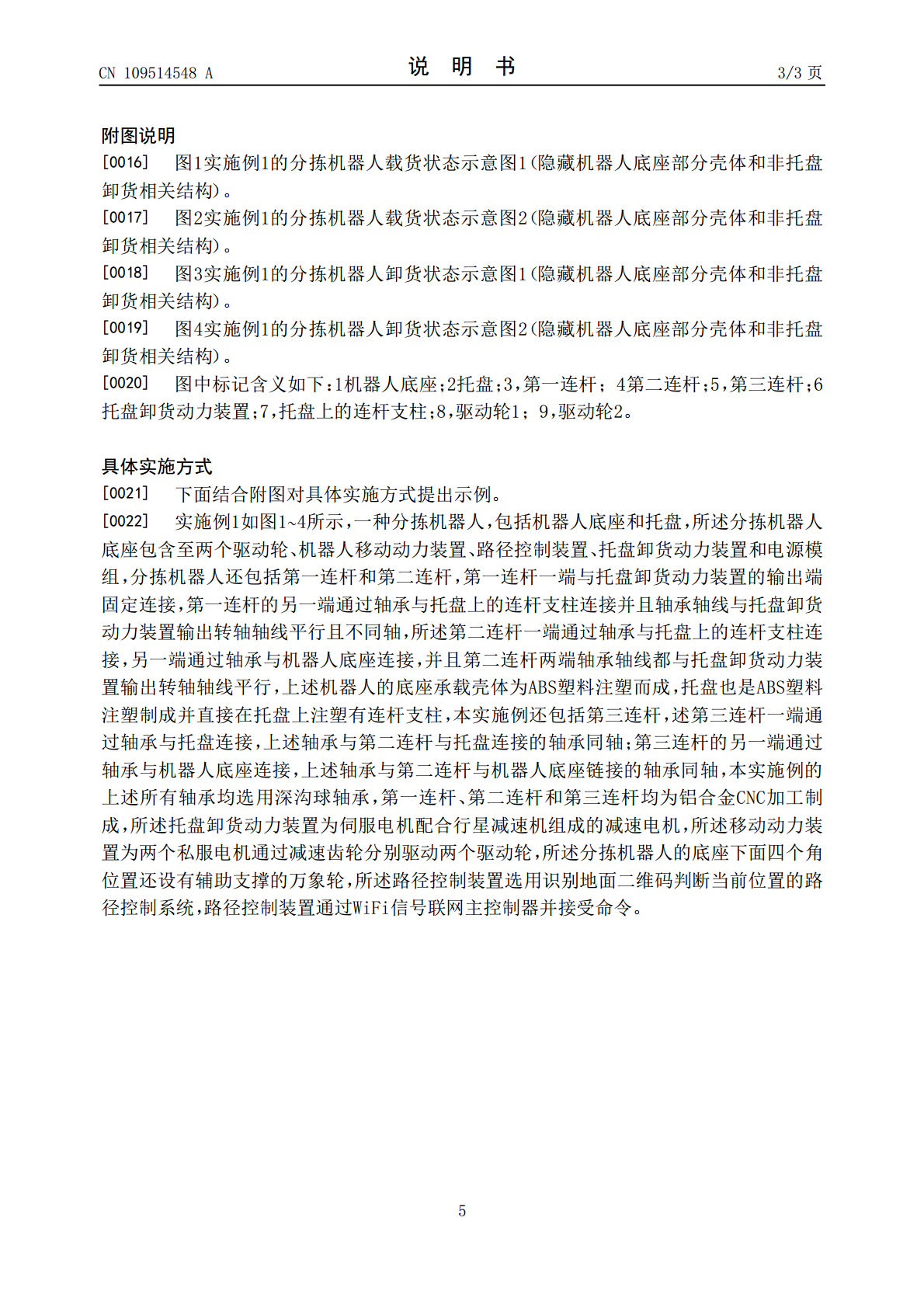
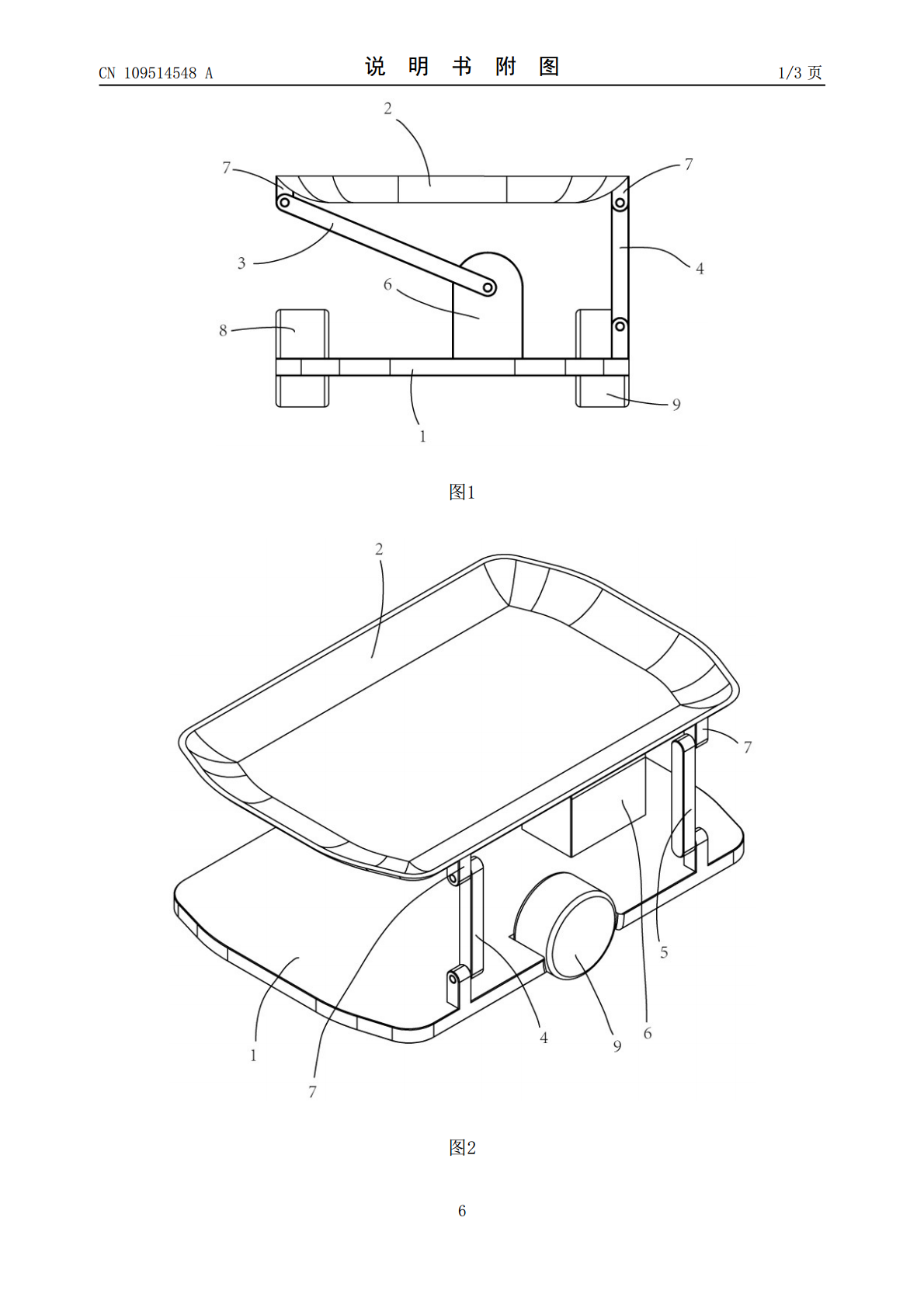
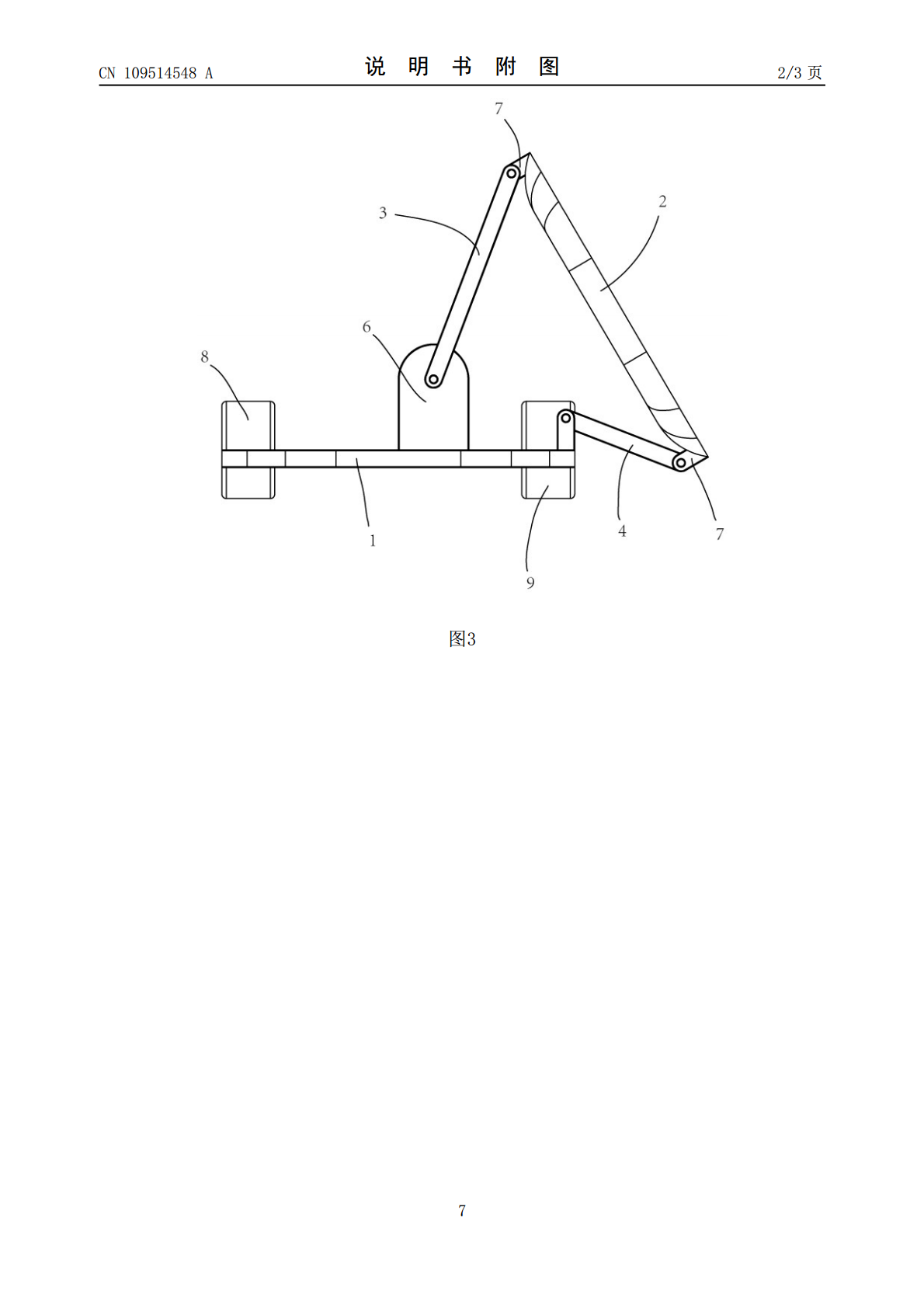
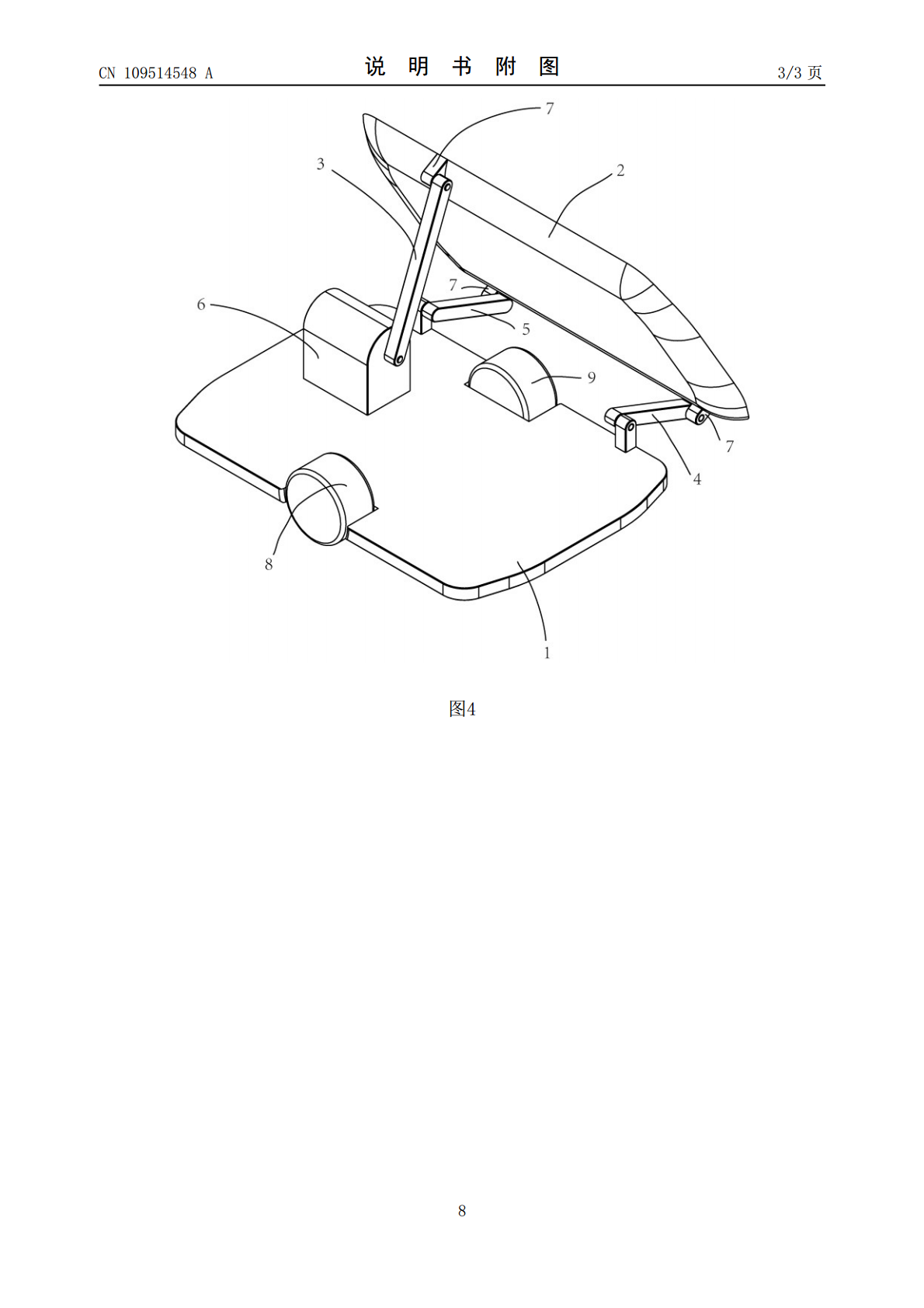
一种分拣机器人,本发明涉及机器人技术领域,尤其是涉及一种分拣机器人。一种分拣机器人,包括机器人底座和托盘,所述分拣机器人底座包含至少两个驱动轮、机器人移动动力装置、路径控制装置、托盘卸货动力装置和电源模组,所述分拣机器人还包括第一连杆和第二连杆,所述第一连杆一端与托盘卸货动力装置的输出端固定连接,第一连杆的另一端通过轴承与托盘连接并且轴承轴线与托盘卸货动力装置输出转轴轴线平行且不同轴,所述第二连杆一端通过轴承与托盘连接,另一端通过轴承与机器人底座连接,并且第二连杆两端轴承轴线都与托盘卸货动力装置输出转轴轴
一种非停靠式分拣机器人分拣装置.pdf
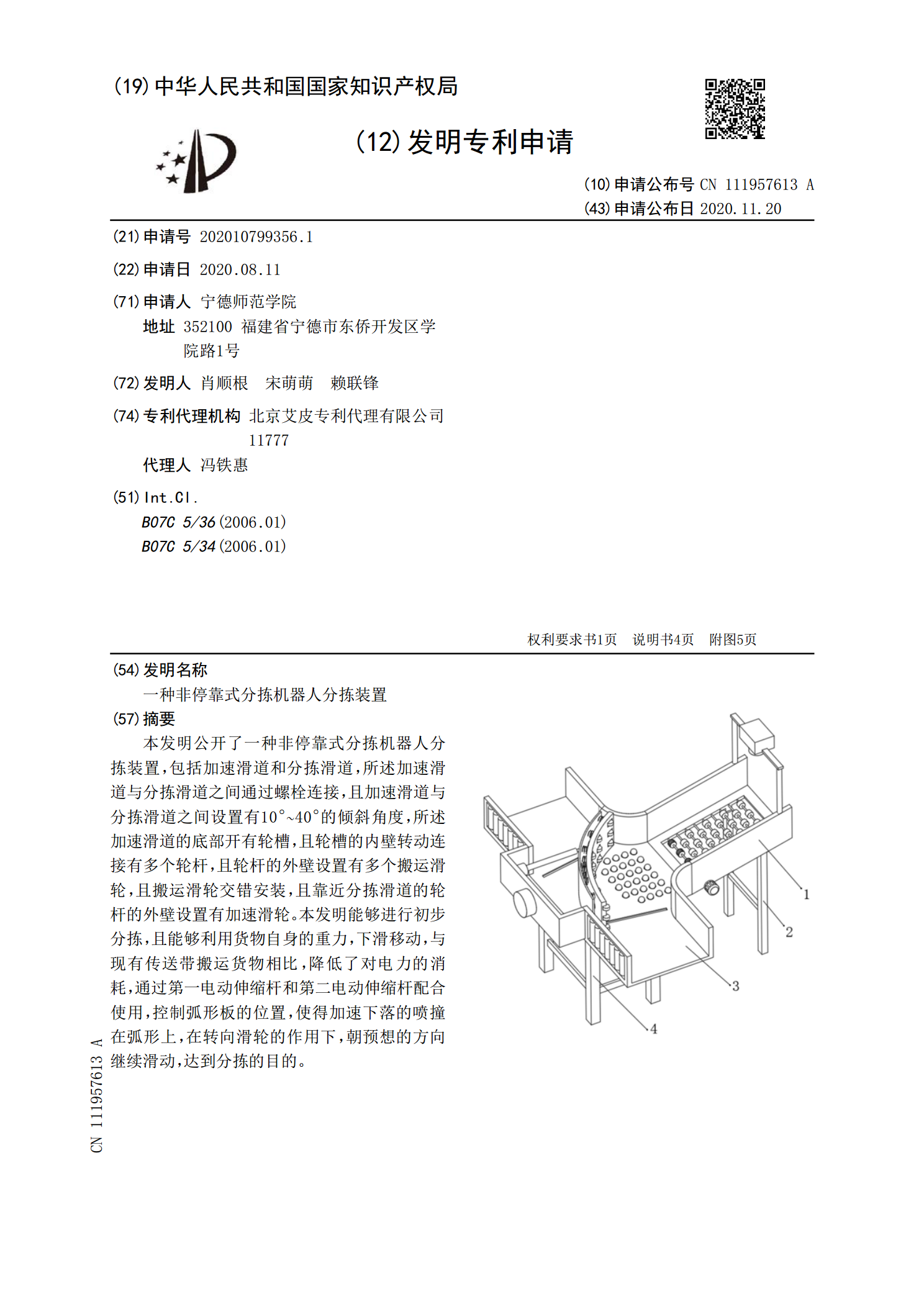
本发明公开了一种非停靠式分拣机器人分拣装置,包括加速滑道和分拣滑道,所述加速滑道与分拣滑道之间通过螺栓连接,且加速滑道与分拣滑道之间设置有10°~40°的倾斜角度,所述加速滑道的底部开有轮槽,且轮槽的内壁转动连接有多个轮杆,且轮杆的外壁设置有多个搬运滑轮,且搬运滑轮交错安装,且靠近分拣滑道的轮杆的外壁设置有加速滑轮。本发明能够进行初步分拣,且能够利用货物自身的重力,下滑移动,与现有传送带搬运货物相比,降低了对电力的消耗,通过第一电动伸缩杆和第二电动伸缩杆配合使用,控制弧形板的位置,使得加速下落的喷撞在弧形
一种货物分拣机器人.pdf
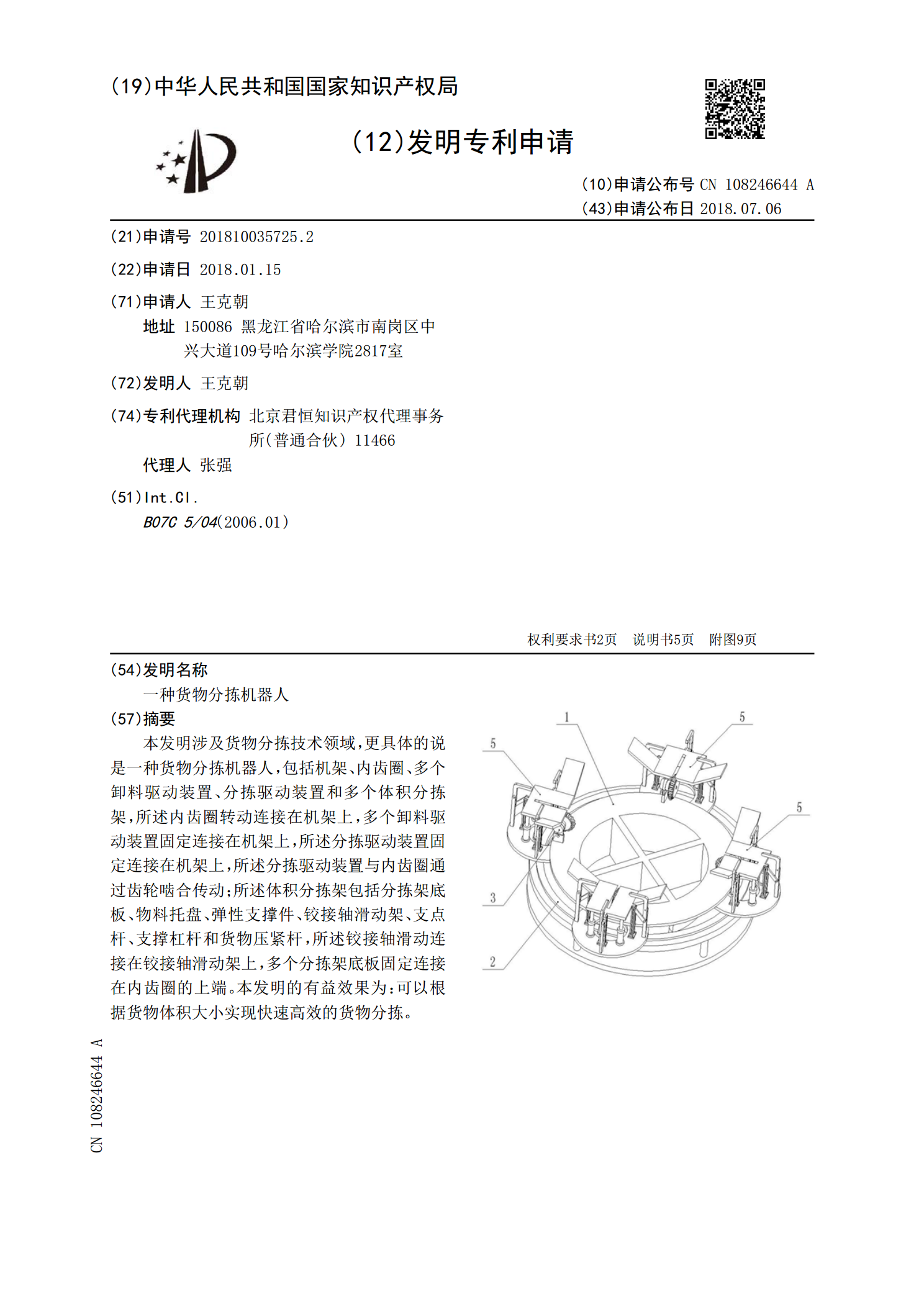
本发明涉及货物分拣技术领域,更具体的说是一种货物分拣机器人,包括机架、内齿圈、多个卸料驱动装置、分拣驱动装置和多个体积分拣架,所述内齿圈转动连接在机架上,多个卸料驱动装置固定连接在机架上,所述分拣驱动装置固定连接在机架上,所述分拣驱动装置与内齿圈通过齿轮啮合传动;所述体积分拣架包括分拣架底板、物料托盘、弹性支撑件、铰接轴滑动架、支点杆、支撑杠杆和货物压紧杆,所述铰接轴滑动连接在铰接轴滑动架上,多个分拣架底板固定连接在内齿圈的上端。本发明的有益效果为:可以根据货物体积大小实现快速高效的货物分拣。

一种分拣快递件机器人.pdf
一种分拣快递件机器人,竖向吸筒与正负压吸管相通接,正负压吸管固定在升降块上,升降块固定在汽缸的活塞杆上,正负压吸管与第二软管相通接,第二软软管与充气泵的抽气嘴相通接;吸气吹气泵和汽缸固定在转盘上,托盘固定在工作台上,滚珠夹持在转盘凹槽和托盘凹槽之间;托盘上成型有立柱,立柱上螺接有限位螺母,限位螺母的下端面压在转盘的上表面;电机的转轴上固定有主动齿轮,主动齿轮与从动齿轮相啮合,从动齿轮成型或固定在转盘上;它可以将快递件分拣成不同的地区的快递件叠放在一起,方便工作人员将快递件快速按地区分类,分拣效率高,提高了