
一种轮腿式凿岩机器人.pdf

猫巷****奕声

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮腿式凿岩机器人.pdf
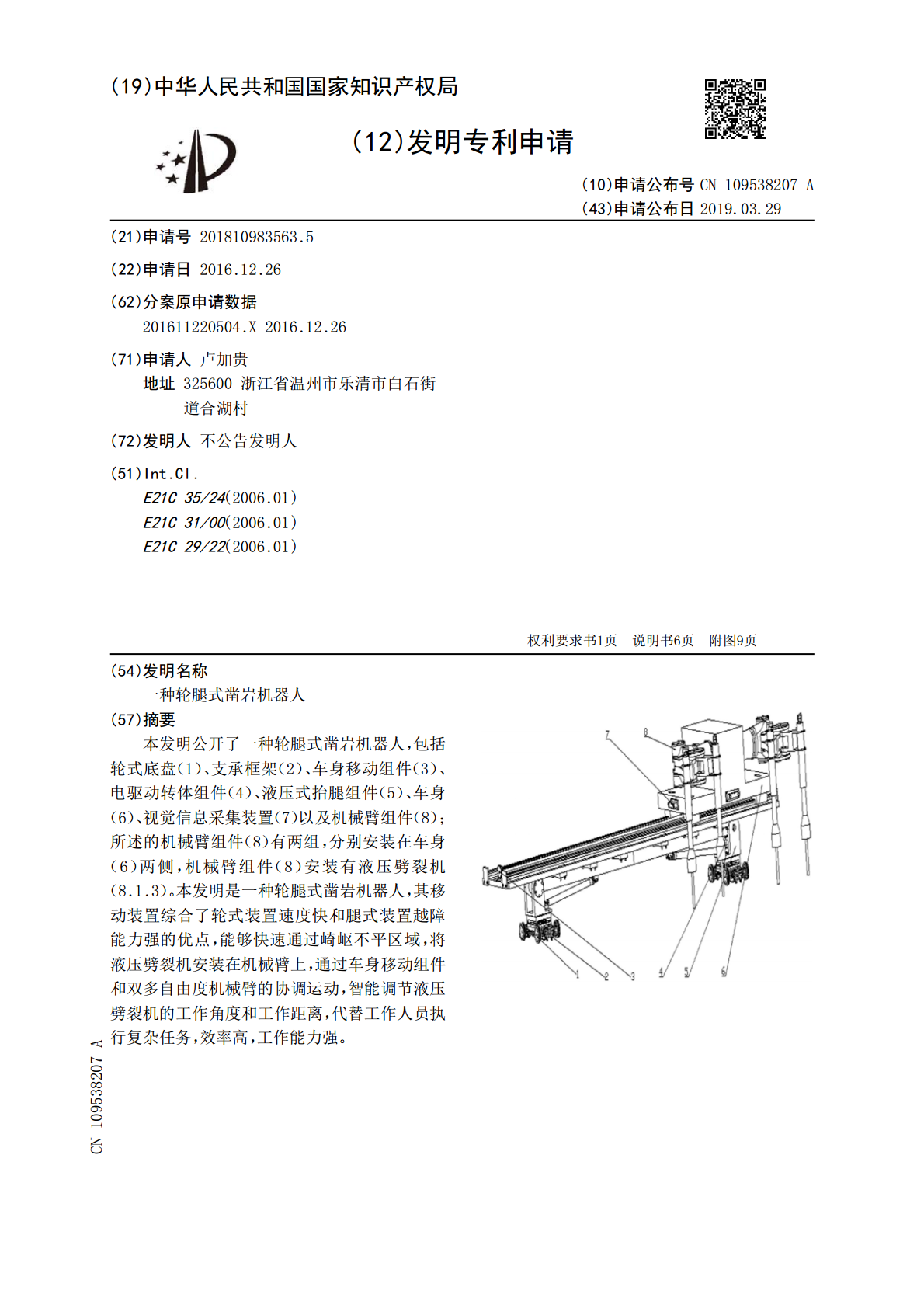
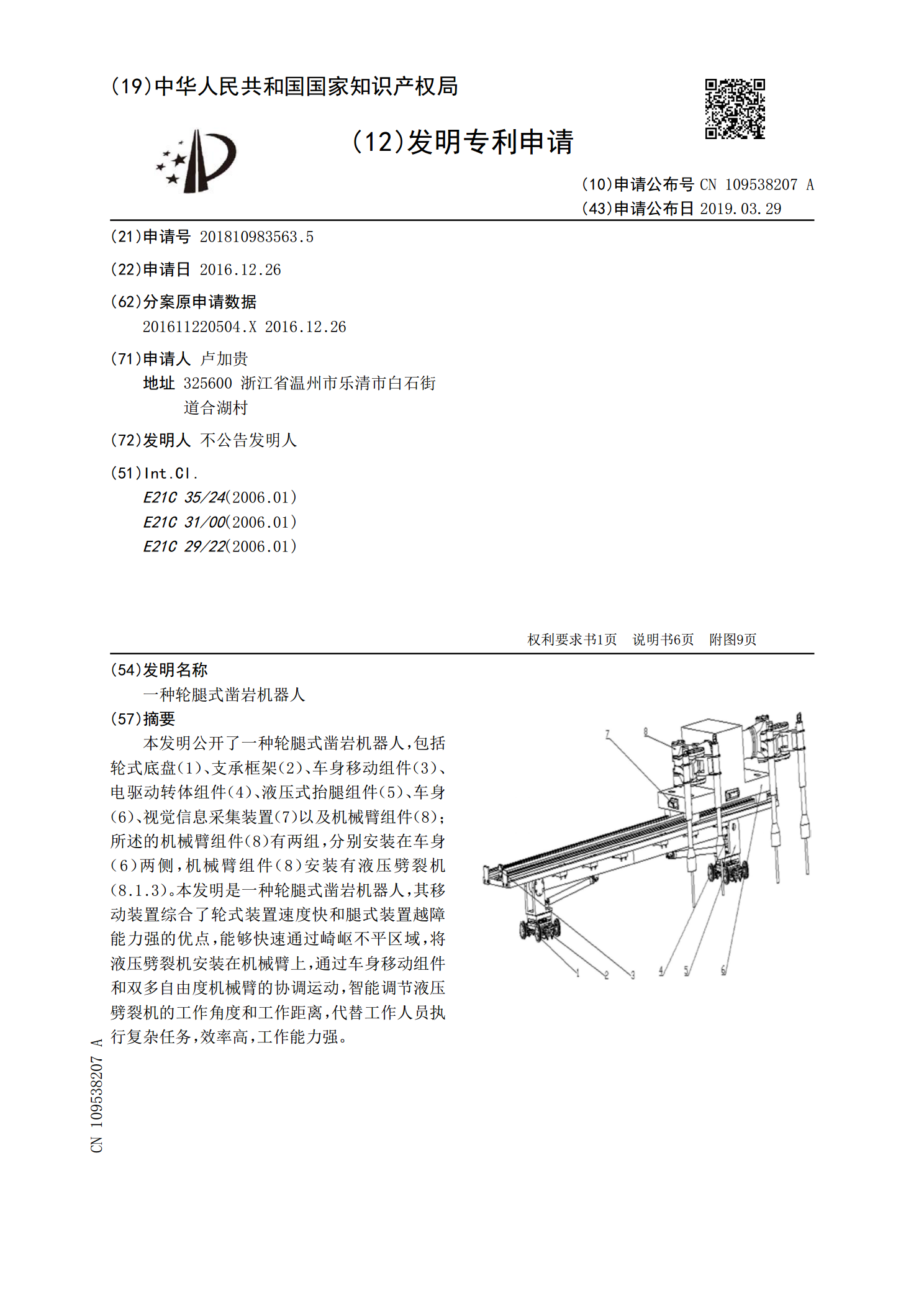
本发明公开了一种轮腿式凿岩机器人,包括轮式底盘(1)、支承框架(2)、车身移动组件(3)、电驱动转体组件(4)、液压式抬腿组件(5)、车身(6)、视觉信息采集装置(7)以及机械臂组件(8);所述的机械臂组件(8)有两组,分别安装在车身(6)两侧,机械臂组件(8)安装有液压劈裂机(8.1.3)。本发明是一种轮腿式凿岩机器人,其移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速通过崎岖不平区域,将液压劈裂机安装在机械臂上,通过车身移动组件和双多自由度机械臂的协调运动,智能调节液压劈裂机的工作角度
一种轮腿式凿岩机器人.pdf
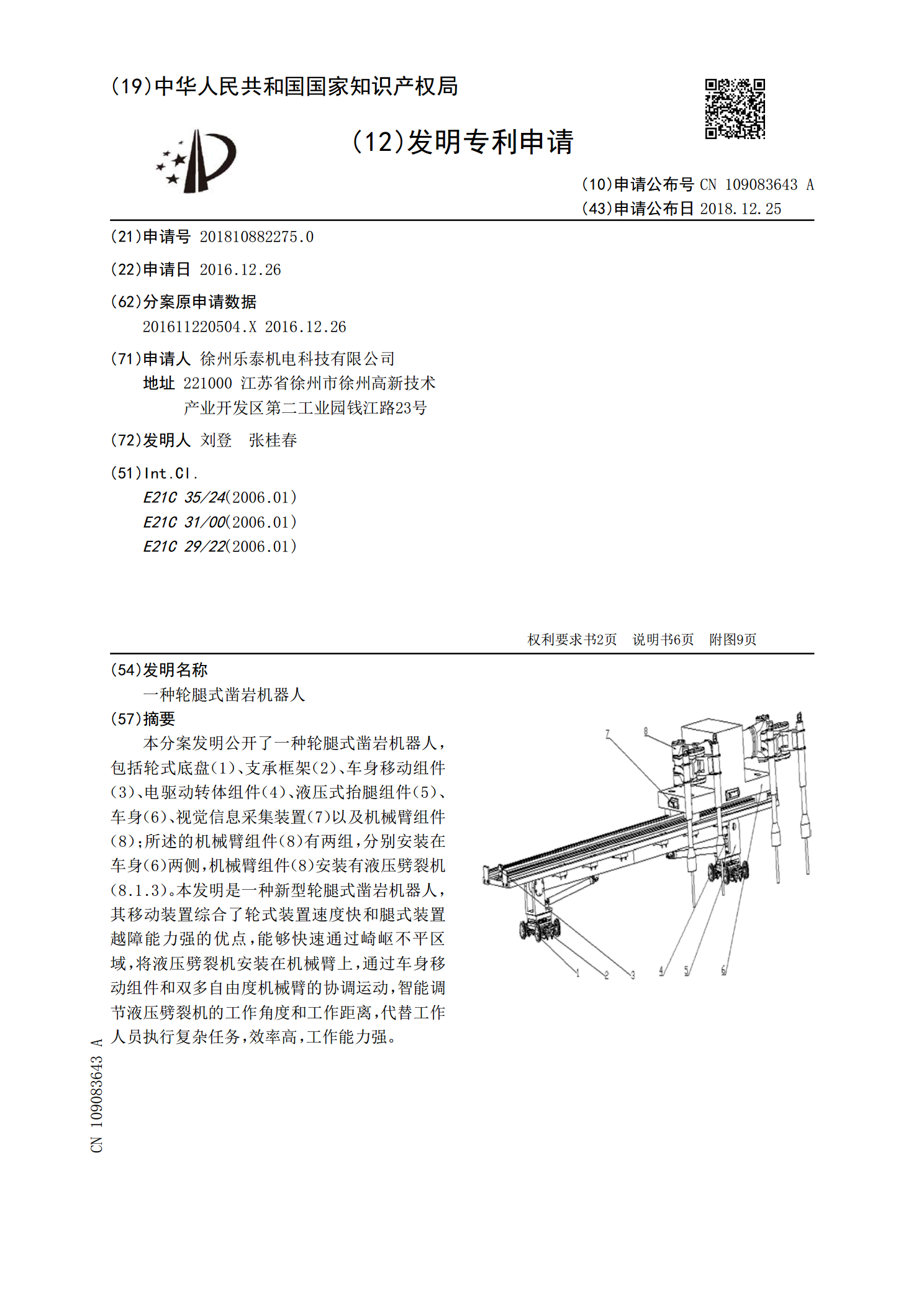
本分案发明公开了一种轮腿式凿岩机器人,包括轮式底盘(1)、支承框架(2)、车身移动组件(3)、电驱动转体组件(4)、液压式抬腿组件(5)、车身(6)、视觉信息采集装置(7)以及机械臂组件(8);所述的机械臂组件(8)有两组,分别安装在车身(6)两侧,机械臂组件(8)安装有液压劈裂机(8.1.3)。本发明是一种新型轮腿式凿岩机器人,其移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速通过崎岖不平区域,将液压劈裂机安装在机械臂上,通过车身移动组件和双多自由度机械臂的协调运动,智能调节液压劈裂机的
轮腿式凿岩机器人.pdf
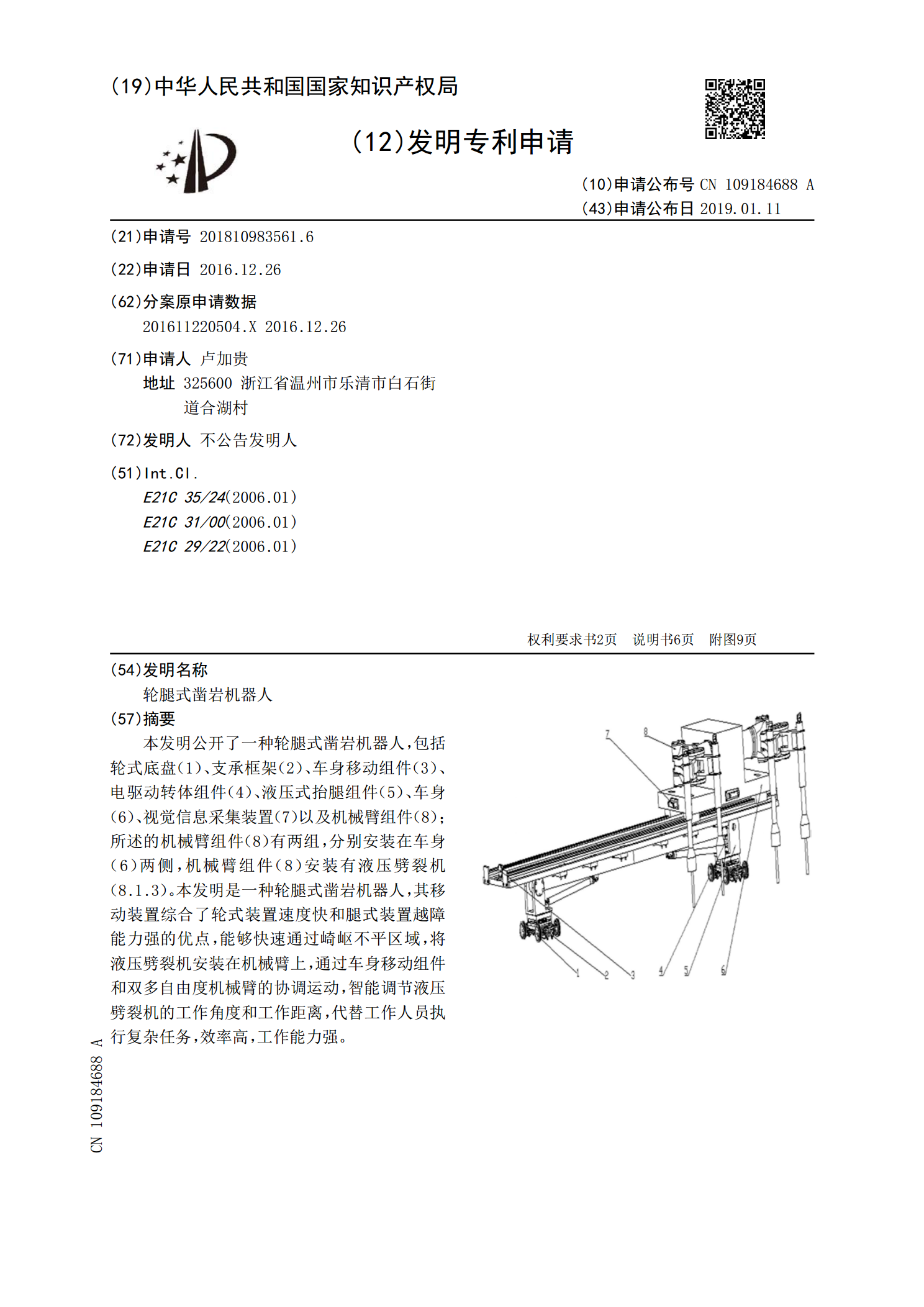
本发明公开了一种轮腿式凿岩机器人,包括轮式底盘(1)、支承框架(2)、车身移动组件(3)、电驱动转体组件(4)、液压式抬腿组件(5)、车身(6)、视觉信息采集装置(7)以及机械臂组件(8);所述的机械臂组件(8)有两组,分别安装在车身(6)两侧,机械臂组件(8)安装有液压劈裂机(8.1.3)。本发明是一种轮腿式凿岩机器人,其移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速通过崎岖不平区域,将液压劈裂机安装在机械臂上,通过车身移动组件和双多自由度机械臂的协调运动,智能调节液压劈裂机的工作角度

一种新型轮腿式凿岩机器人.pdf
本发明公开了一种新型轮腿式凿岩机器人,包括轮式底盘(1)、支承框架(2)、车身移动组件(3)、电驱动转体组件(4)、液压式抬腿组件(5)、车身(6)、视觉信息采集装置(7)以及机械臂组件(8);所述的机械臂组件(8)有两组,分别安装在车身(6)两侧,机械臂组件(8)安装有液压劈裂机(8.1.3)。本发明是一种新型轮腿式凿岩机器人,其移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速通过崎岖不平区域,将液压劈裂机安装在机械臂上,通过车身移动组件和双多自由度机械臂的协调运动,智能调节液压劈裂机的

一种具有视觉信息采集装置的轮腿式凿岩机器人.pdf
本发明公开了一种具有视觉信息采集装置的轮腿式凿岩机器人,包括轮式底盘(1)、支承框架(2)、车身移动组件(3)、电驱动转体组件(4)、液压式抬腿组件(5)、车身(6)、视觉信息采集装置(7)以及机械臂组件(8);所述的机械臂组件(8)有两组,分别安装在车身(6)两侧,机械臂组件(8)安装有液压劈裂机(8.1.3)。本发明的移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,能够快速通过崎岖不平区域,将液压劈裂机安装在机械臂上,通过车身移动组件和双多自由度机械臂的协调运动,智能调节液压劈裂机的工作角度和