
双伺服驱动差动式移动/摆动工作台装置.pdf

听云****君哇

1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双伺服驱动差动式移动/摆动工作台装置.pdf
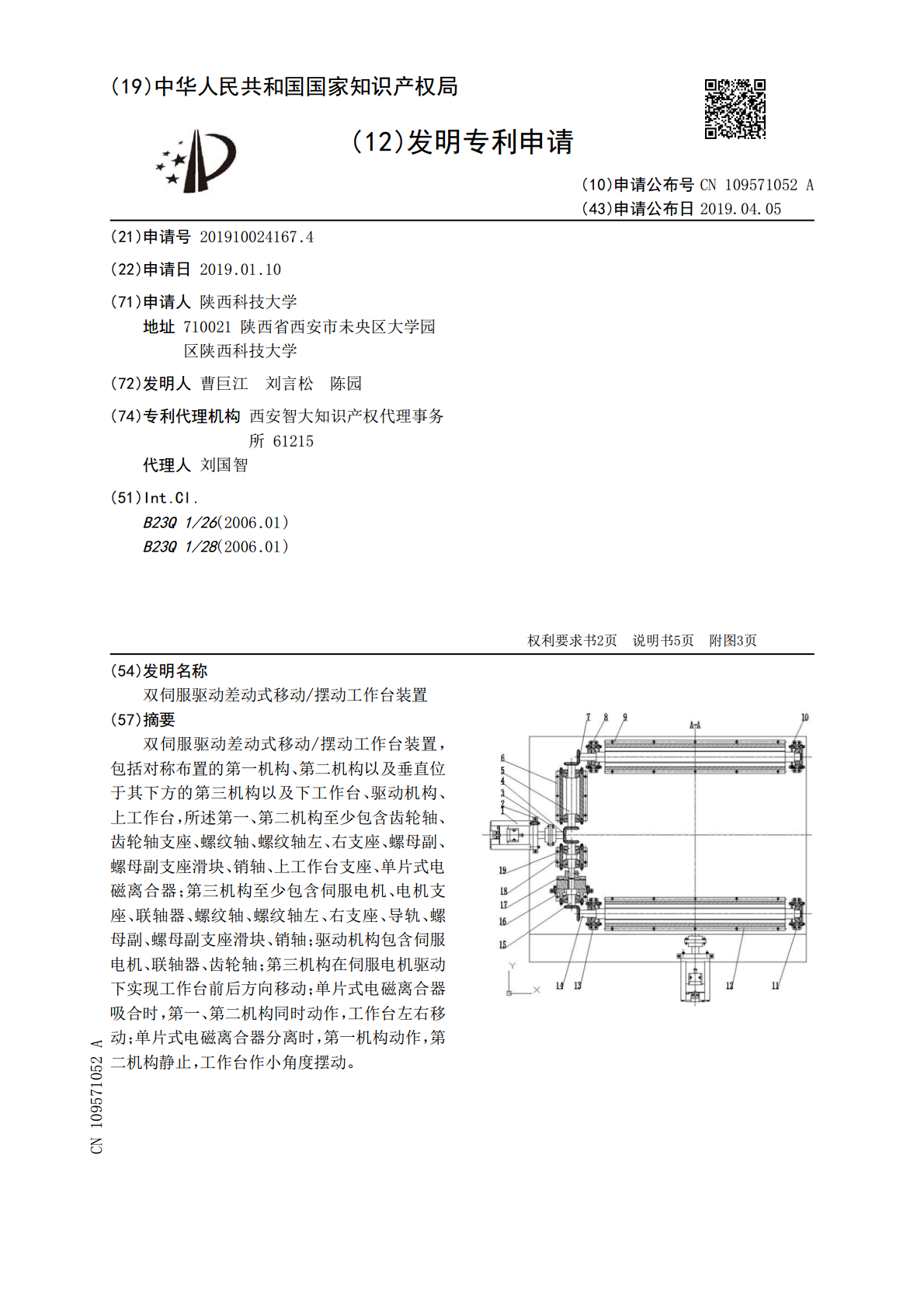
双伺服驱动差动式移动/摆动工作台装置,包括对称布置的第一机构、第二机构以及垂直位于其下方的第三机构以及下工作台、驱动机构、上工作台,所述第一、第二机构至少包含齿轮轴、齿轮轴支座、螺纹轴、螺纹轴左、右支座、螺母副、螺母副支座滑块、销轴、上工作台支座、单片式电磁离合器;第三机构至少包含伺服电机、电机支座、联轴器、螺纹轴、螺纹轴左、右支座、导轨、螺母副、螺母副支座滑块、销轴;驱动机构包含伺服电机、联轴器、齿轮轴;第三机构在伺服电机驱动下实现工作台前后方向移动;单片式电磁离合器吸合时,第一、第二机构同时动作,工作

伺服差动式插齿机传动装置.pdf
本发明涉及一种插齿机的传动装置。伺服差动式插齿机传动装置,它包括有曲柄滑块机构、蜗杆蜗轮传动机构、刀轴、刀轴传动机构;其特征在于:曲柄滑块机构中的滑块上设有位移检测装置,位移检测装置的输出端由第二电缆与伺服传动装置的信号处理与控制器的输入端相连,伺服传动装置的电动机的输出轴由联轴器与差动传动装置的差动主轴相连;差动传动装置的差动输入轮由第二传动带或第二传动链与蜗杆蜗轮传动机构中的蜗轮传动轮相连,差动传动装置的双联输出传动轮通过第一传动带或第一传动链与刀轴传动机构的刀轴传动轮相连,刀轴传动机构设置在刀轴上。

移动工作台的驱动装置.pdf
本发明公开了移动工作台的驱动装置,包括设置在移动工作台上的电机减速器及移动工作台下部对称设置的一对主动滚轮,所述电机减速器设两个输出轴,输出轴经中间传动装置与主动滚轮的主动轮轴联动。所述中间传动装置为万向节,万向节一端与输出轴上设置的连接套连接,万向节另一端通过设于轴承座上的齿轮轴与主动轮轴的齿轮啮合,所述轴承座设于所述移动工作台上。由于电机减速器直接装在移动工作台上,从而产生了移动工作台可自行行走的功能,电机减速器为双输出轴接口,便于电机减速器均匀的向二端的主动轮轴传递动力,而且本技术方案,

可控式摆动电机往复驱动装置.pdf
本发明公开了一种可控式摆动电机往复驱动装置,以解决现有技术中工件难以自动输送的问题。包括机架、固设的摆动电机、离合器、与机架转动连接的凸轮、铰接于机架的摇杆和可直线运动的输出杆,摆动电机上的原动杆与离合器的驱动端连接,离合器的从动端与凸轮转轴连接,摇杆的驱动端与凸轮上的曲面相抵,摇杆的从动端通过条孔与输出杆的驱动端铰接,输出杆的从动端用于推动外部的工件,输出杆的驱动端为长度可调的伸缩杆结构。所述的结构中,摆动电机的原动杆通过离合器驱动凸轮进行转动,凸轮的曲面推挤摇杆摇动并进一步驱动输出杆产生直线往复运动,
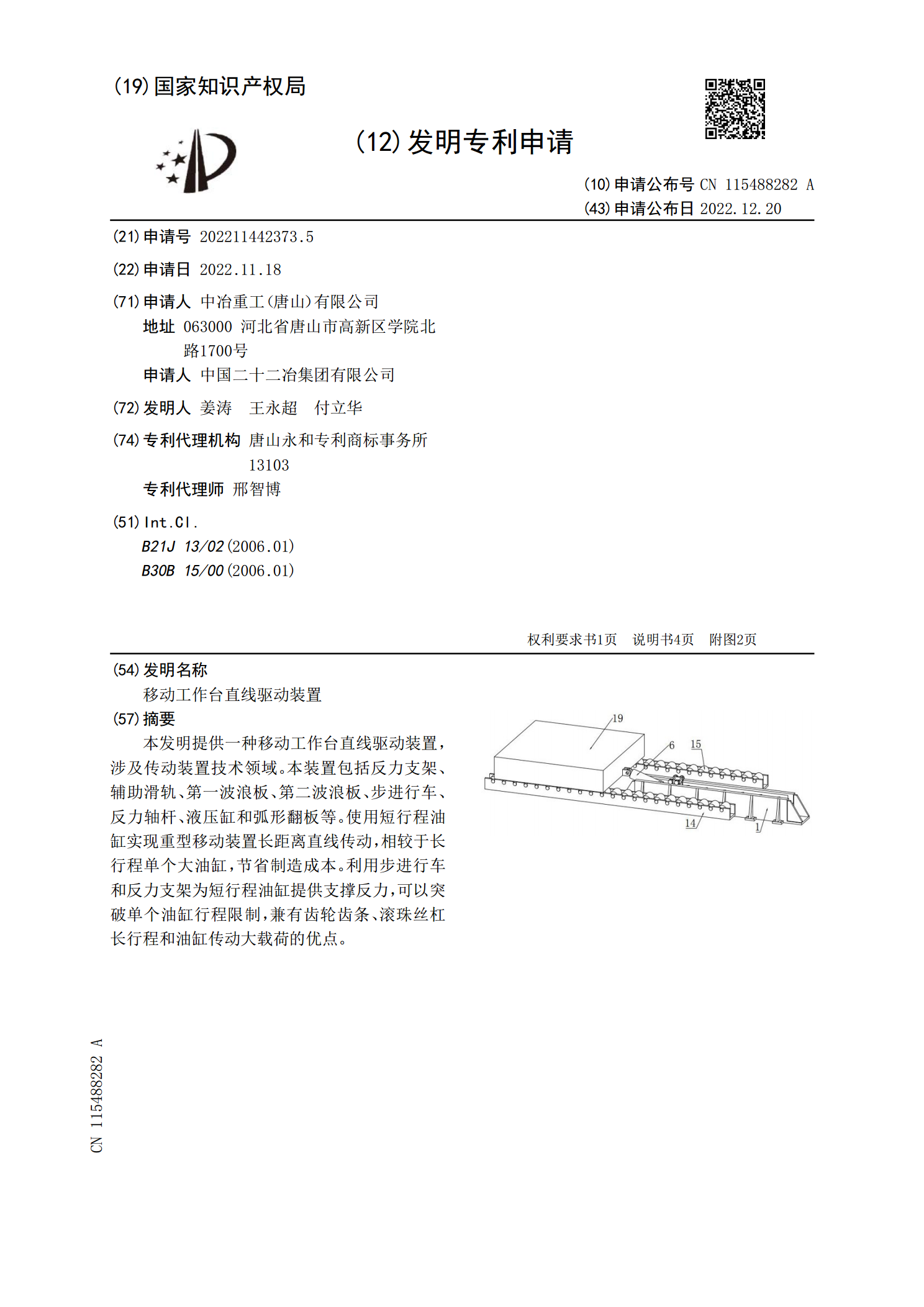
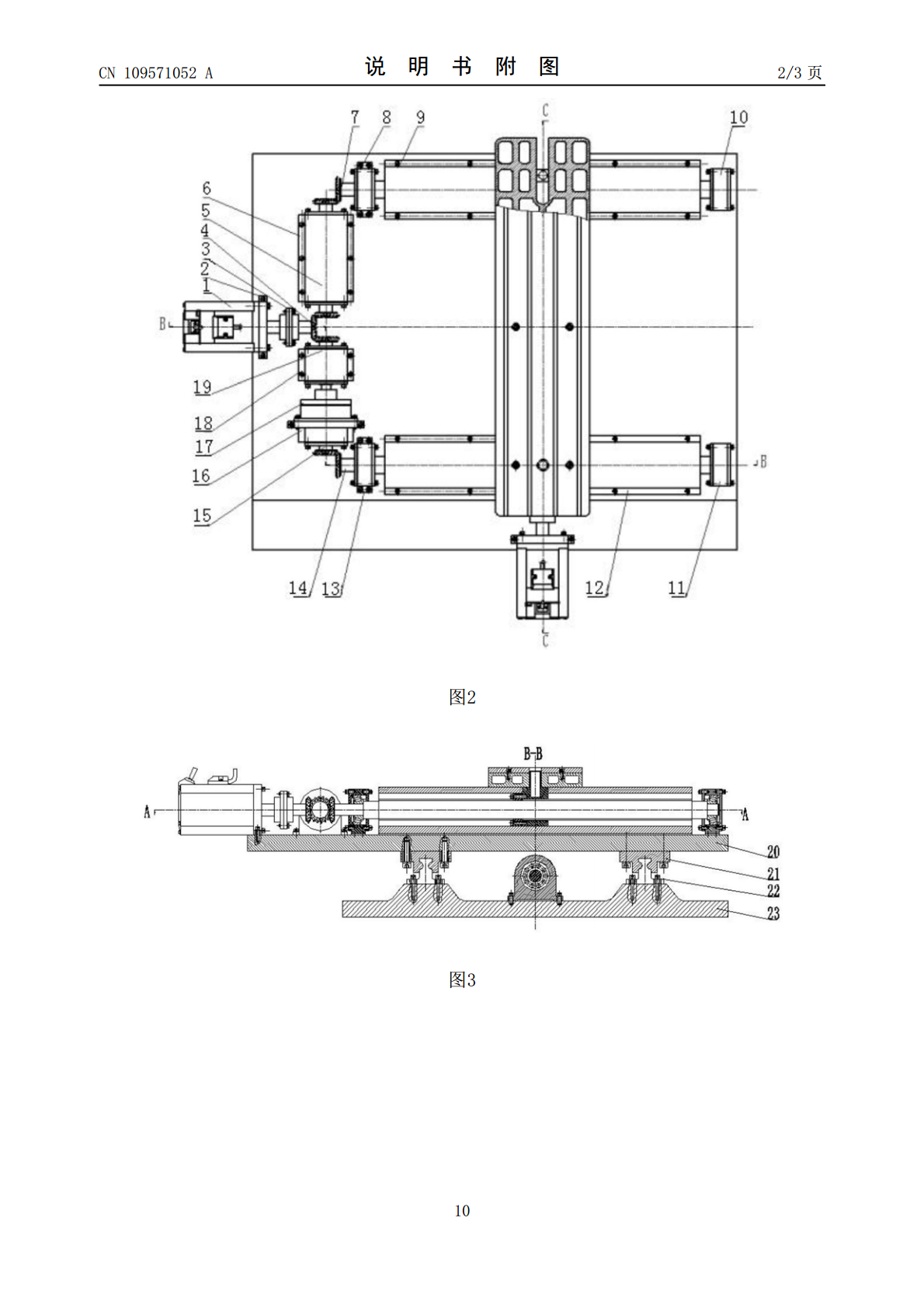
移动工作台直线驱动装置.pdf
本发明提供一种移动工作台直线驱动装置,涉及传动装置技术领域。本装置包括反力支架、辅助滑轨、第一波浪板、第二波浪板、步进行车、反力轴杆、液压缸和弧形翻板等。使用短行程油缸实现重型移动装置长距离直线传动,相较于长行程单个大油缸,节省制造成本。利用步进行车和反力支架为短行程油缸提供支撑反力,可以突破单个油缸行程限制,兼有齿轮齿条、滚珠丝杠长行程和油缸传动大载荷的优点。