
直线一级倒立摆.pptx

骑着****猪猪


1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共48页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

直线一级倒立摆.pptx
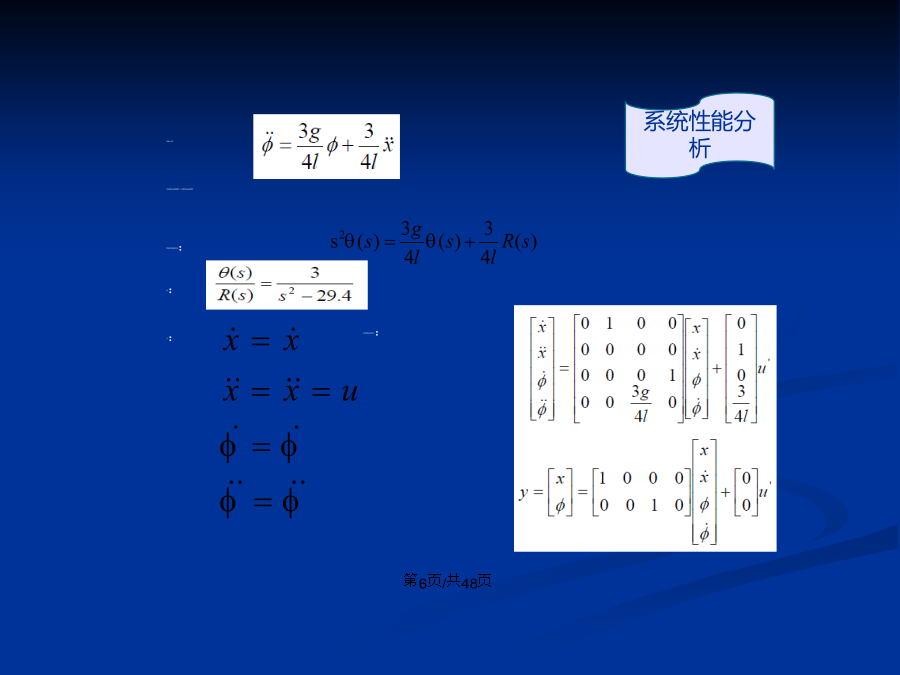
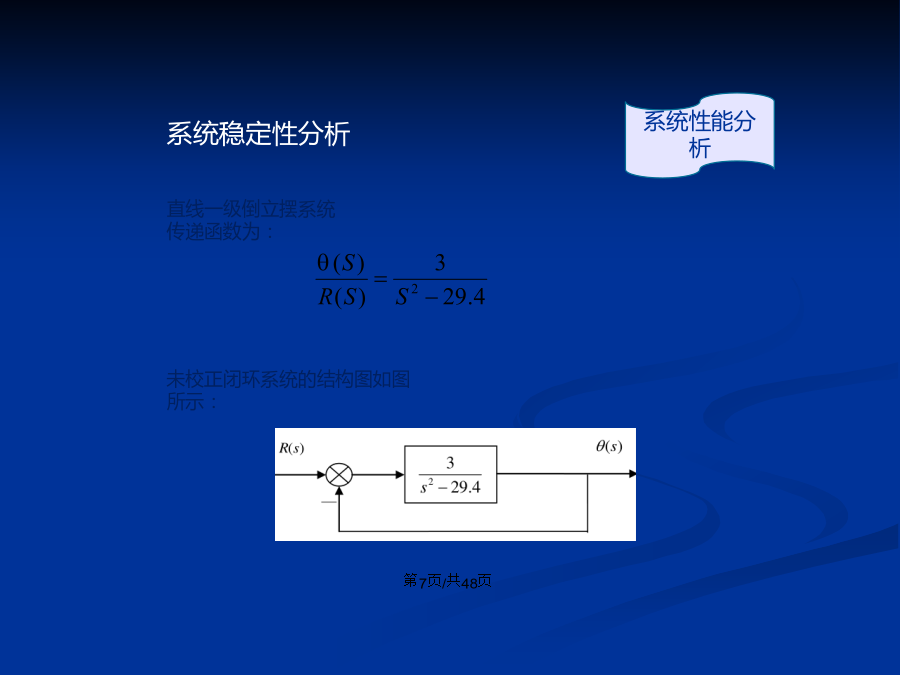
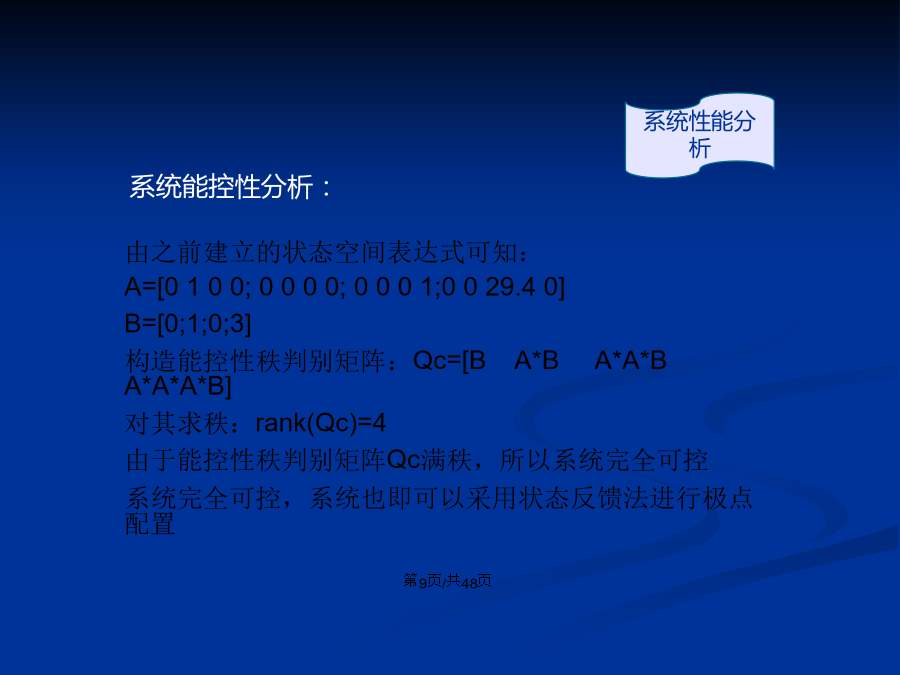
会计学点击添加文本一级直线倒立摆系统建模摆杆力矩平衡方程由微分方程点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本点击添加文本1、确定极点配置法反馈方式2、根据性能指标确定期望极点3、根据期望极点确定反馈矩阵K4、搭建系统仿真模型并分析性能指标极点配置法存在状态反馈和输出反馈方式1、输出反馈的

直线一级倒立摆的起摆及稳摆的智能控制.docx
直线一级倒立摆的起摆及稳摆的智能控制摘要:本文针对直线一级倒立摆的起摆和稳摆控制问题进行了研究。首先介绍了直线一级倒立摆的结构和特点,然后对其动力学模型进行了建立。接着,提出了基于比例积分微分(PID)控制策略的智能控制算法,并进行了仿真分析。最后,通过实验验证了该算法的有效性与稳定性,为直线一级倒立摆的实际应用提供了有益的借鉴。关键词:直线一级倒立摆;起摆控制;稳摆控制;PID控制;智能控制1.引言直线一级倒立摆是一种特殊的倒立摆系统,它由一个质量为m,长度为l的刚性杆条和一个可控的外力矩M组成,通常用

直线一级倒立摆机理建模.docx
上海电力学院课程设计报告课名:自动控制原理应用实践题目:倒立摆控制装置院系:自动化工程学院专业:测控技术与仪器班级:2011151班姓名:马玉林学号:20112515时间:2014年1月14日倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。倒立

直线一级倒立摆---开题报告-范例.doc
周祖林自行车里程表的设计44xxx学院本科毕业论文(设计)开题报告二级学院:xxxxxxxxx学号姓名专业自动化年级班别2012级3班论文(设计)题目直线一级倒立摆控制系统的设计拟完成时间2016年4月10日指导教师姓名及职称xxx讲师题目类型囗理论研究囗应用研究设计开发囗其他命题来源教师命题囗学生自主命题囗教师科研课题是否在实验、实习、工程实践和社会调查等社会实践中完成囗是否一
直线一级倒立摆---开题报告-范例.doc
周祖林自行车里程表的设计44xxx学院本科毕业论文(设计)开题报告二级学院:xxxxxxxxx学号姓名专业自动化年级班别2012级3班论文(设计)题目直线一级倒立摆控制系统的设计拟完成时间2016年4月10日指导教师姓名及职称xxx讲师题目类型囗理论研究囗应用研究设计开发囗其他命题来源教师命题囗学生自主命题囗教师科研课题是否在实验、实习、工程实践和社会调查等社会实践中完成囗是否一