
基于图像重构卷积神经网络的零件外观瑕疵检测方法.pdf

一只****爱敏

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于图像重构卷积神经网络的零件外观瑕疵检测方法.pdf
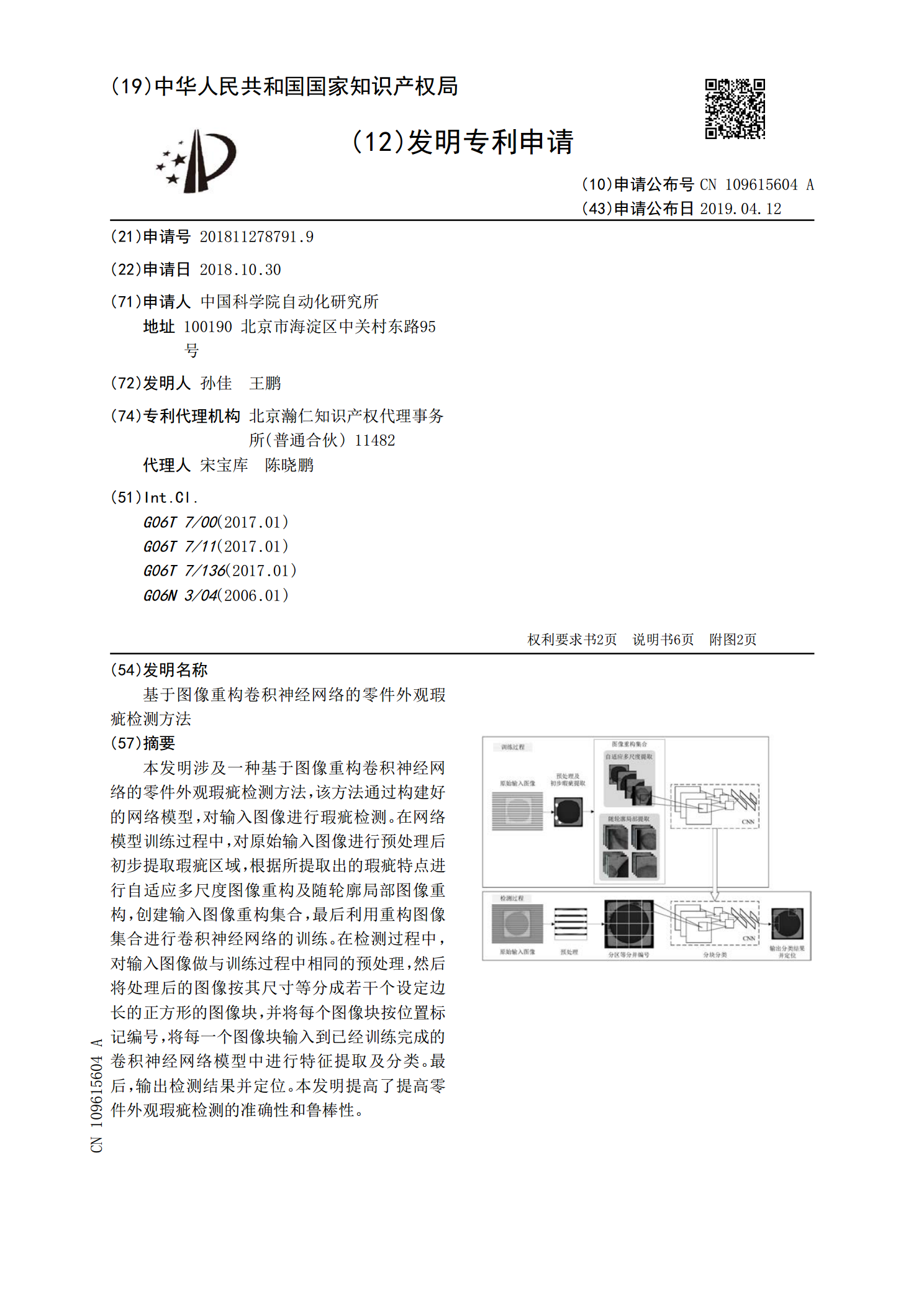
本发明涉及一种基于图像重构卷积神经网络的零件外观瑕疵检测方法,该方法通过构建好的网络模型,对输入图像进行瑕疵检测。在网络模型训练过程中,对原始输入图像进行预处理后初步提取瑕疵区域,根据所提取出的瑕疵特点进行自适应多尺度图像重构及随轮廓局部图像重构,创建输入图像重构集合,最后利用重构图像集合进行卷积神经网络的训练。在检测过程中,对输入图像做与训练过程中相同的预处理,然后将处理后的图像按其尺寸等分成若干个设定边长的正方形的图像块,并将每个图像块按位置标记编号,将每一个图像块输入到已经训练完成的卷积神经网络模型

基于卷积神经网络的织物瑕疵检测方法研究.docx
基于卷积神经网络的织物瑕疵检测方法研究标题:基于卷积神经网络的织物瑕疵检测方法研究摘要:织物瑕疵检测是纺织行业中至关重要的一个环节,它能够提高织物生产的质量和效率。传统的织物瑕疵检测方法依赖于人工视觉,存在着高昂的成本和低效的问题。随着计算机视觉和深度学习的快速发展,基于卷积神经网络的织物瑕疵检测方法成为研究的热点。本文针对织物生产中常见的瑕疵问题进行研究,提出了一种基于卷积神经网络的织物瑕疵检测方法。通过收集和标注大量的织物瑕疵样本,构建了瑕疵检测模型,并对模型进行了优化和测试。实验结果表明,该方法可以
基于深度卷积神经网络的图像轮廓检测方法.pdf
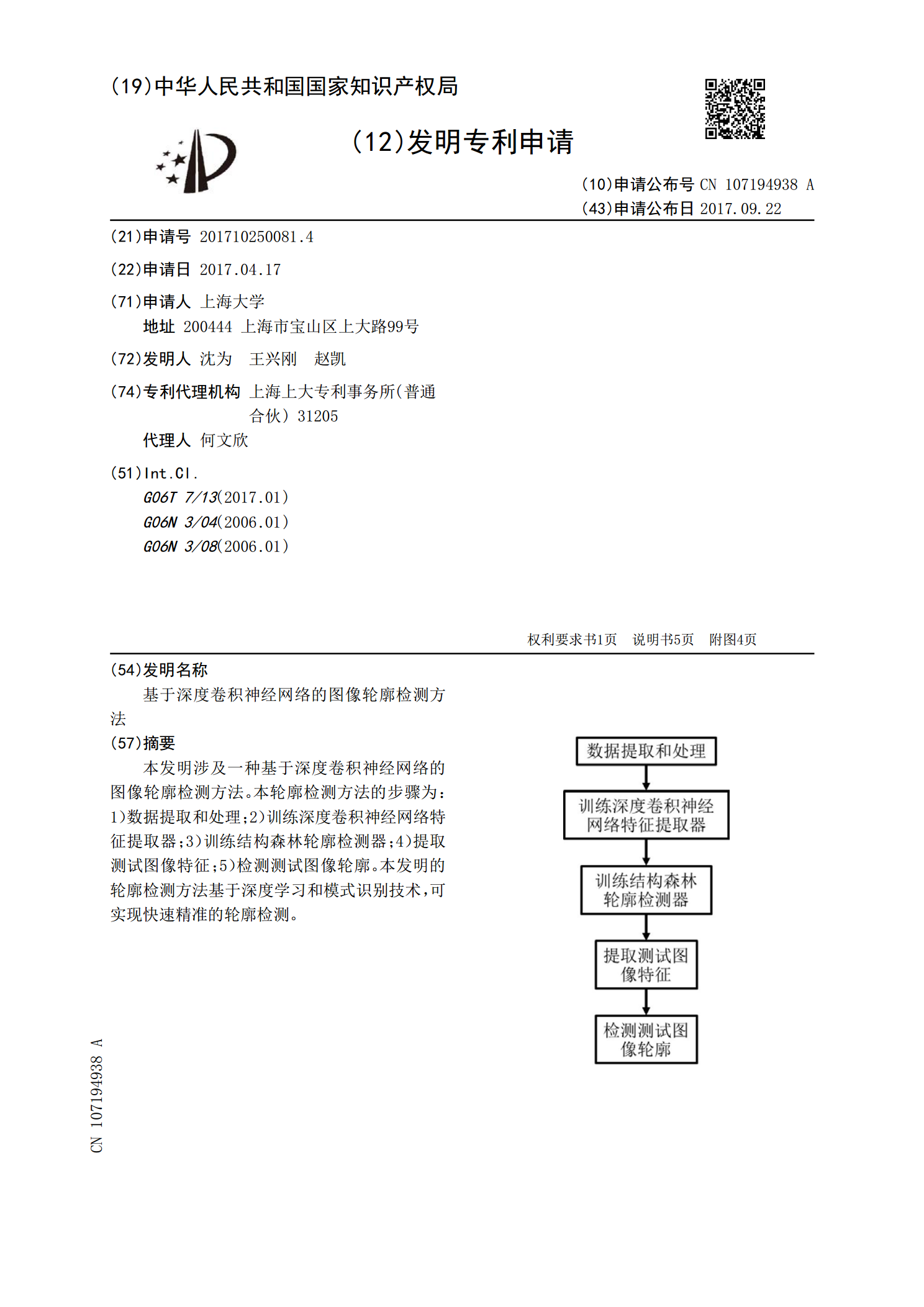
本发明涉及一种基于深度卷积神经网络的图像轮廓检测方法。本轮廓检测方法的步骤为:1)数据提取和处理;2)训练深度卷积神经网络特征提取器;3)训练结构森林轮廓检测器;4)提取测试图像特征;5)检测测试图像轮廓。本发明的轮廓检测方法基于深度学习和模式识别技术,可实现快速精准的轮廓检测。

基于卷积神经网络的主变压器外观缺陷检测方法.docx
基于卷积神经网络的主变压器外观缺陷检测方法基于卷积神经网络的主变压器外观缺陷检测方法摘要:主变压器是电力系统中重要的设备之一,其外观缺陷可能会对设备的正常运行产生影响。因此,准确快速地检测变压器外观缺陷对于确保电力系统的稳定运行至关重要。本论文基于卷积神经网络的方法,提出了一种主变压器外观缺陷检测方法。关键词:主变压器;外观缺陷检测;卷积神经网络引言:主变压器是电力系统中的重要组成部分,主要用于实现不同电压之间的能量转换。由于运行环境的原因,主变压器外观往往会受到污染、沉积、腐蚀等影响,导致外面出现各种形

基于深度卷积神经网络的遥感图像目标检测方法.docx
基于深度卷积神经网络的遥感图像目标检测方法标题:基于深度卷积神经网络的遥感图像目标检测方法摘要:随着遥感技术的快速发展,大量的遥感图像数据应用于各种领域,如城市规划、环境监测和农业。遥感图像目标检测是从遥感图像中自动提取感兴趣的目标区域的关键任务。本文提出了一种基于深度卷积神经网络的遥感图像目标检测方法,该方法能够准确地检测出遥感图像中的目标,并具有较高的鲁棒性和性能。1.引言近年来,随着深度学习和神经网络的快速发展,目标检测在计算机视觉领域取得了显著的进展。然而,由于遥感图像的高分辨率和复杂背景,传统的