
手机摄像头模组焊接固定装置及焊接固定方法.pdf

努力****骞北

1/8
2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
手机摄像头模组焊接固定装置及焊接固定方法.pdf
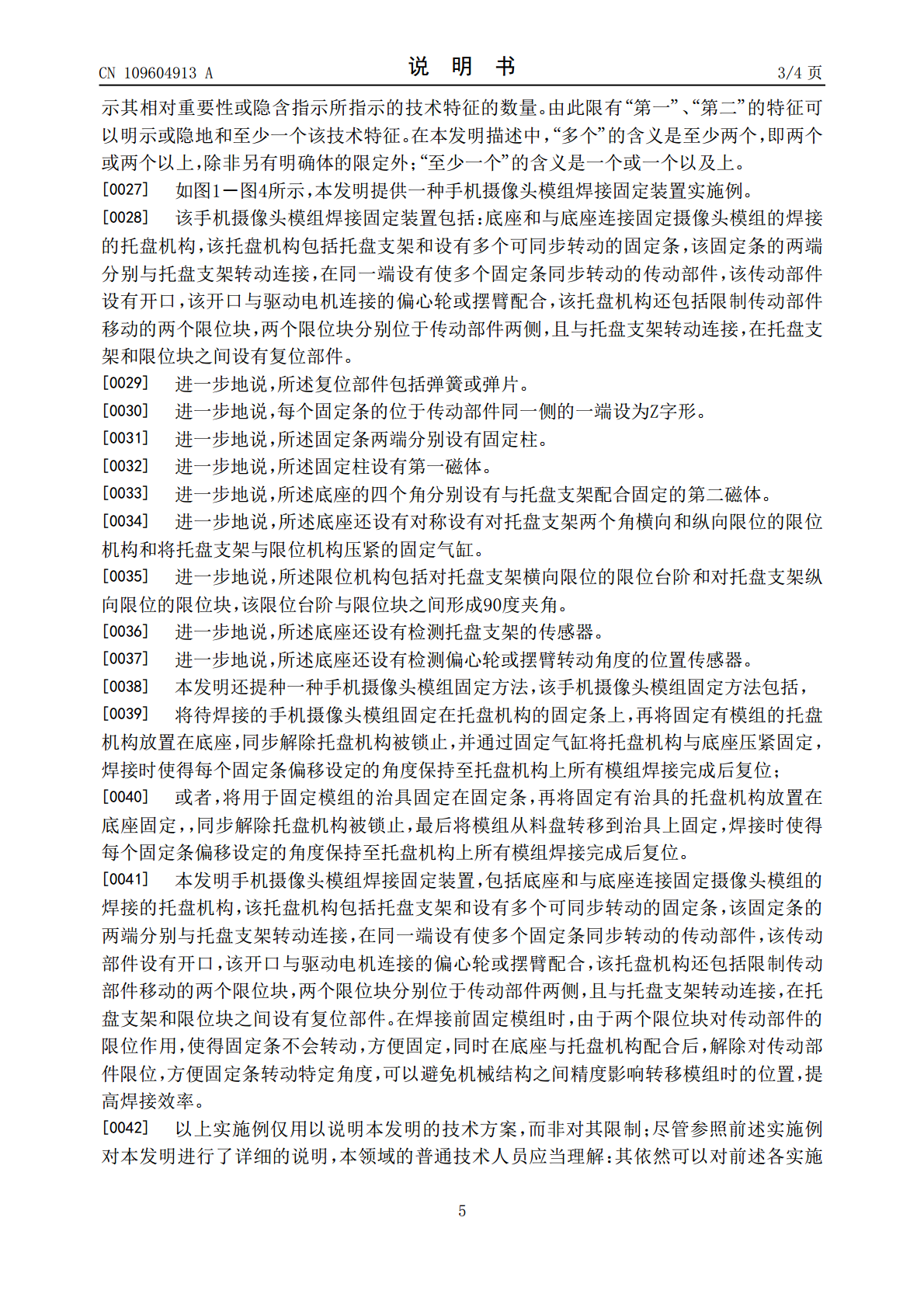
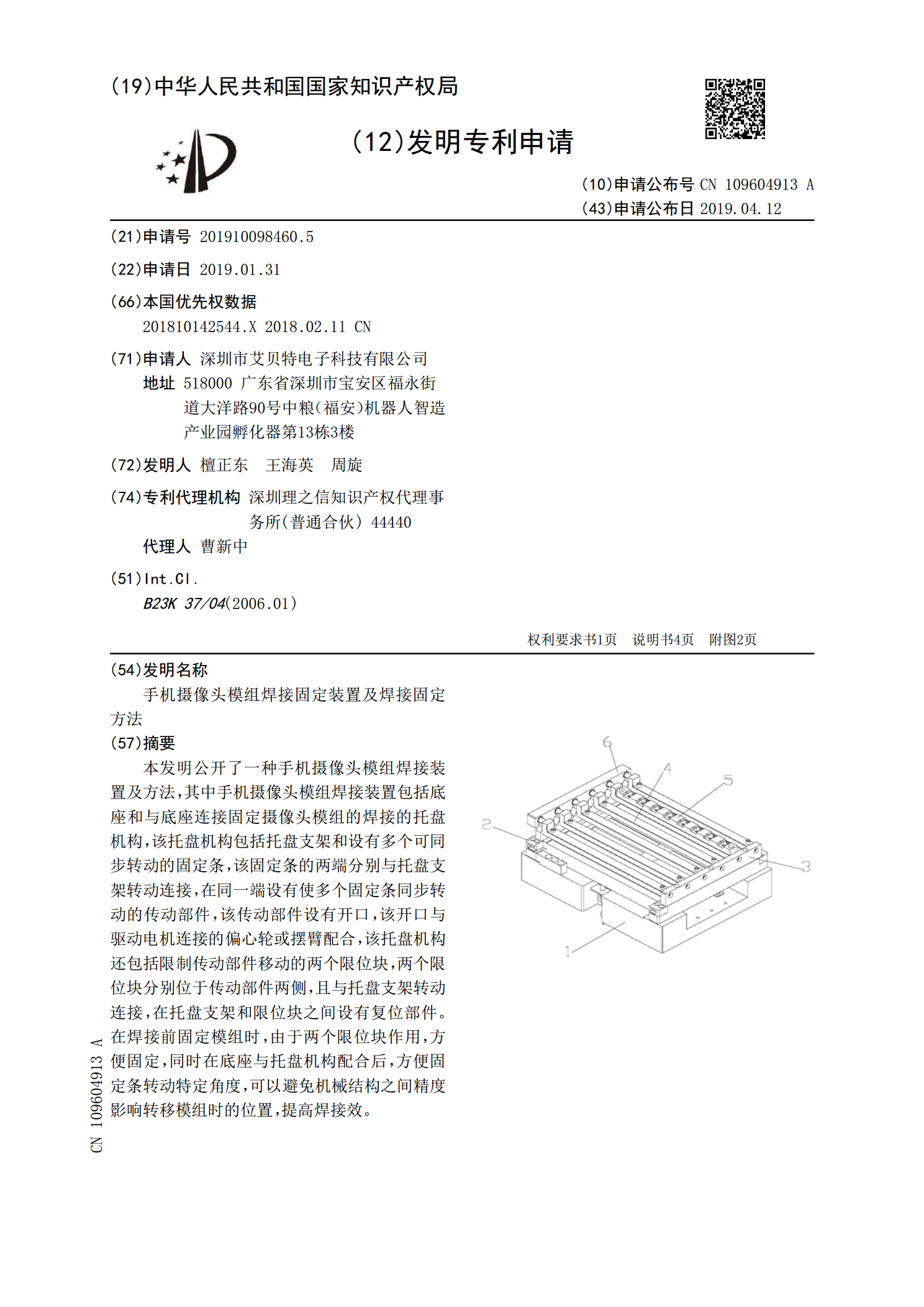
本发明公开了一种手机摄像头模组焊接装置及方法,其中手机摄像头模组焊接装置包括底座和与底座连接固定摄像头模组的焊接的托盘机构,该托盘机构包括托盘支架和设有多个可同步转动的固定条,该固定条的两端分别与托盘支架转动连接,在同一端设有使多个固定条同步转动的传动部件,该传动部件设有开口,该开口与驱动电机连接的偏心轮或摆臂配合。使用时,通过传动部件使固定在固定条上所有的模组同步转动特定的角度,进行焊接,焊接完成后将模组取出。由于该固定装置可以使所有模组同步转动相同角度,只要在设置时将模组固定的角度调整好,必然能保证每
手机摄像头模组焊接固定装置及焊接固定方法.pdf
本发明公开了一种手机摄像头模组焊接装置及方法,其中手机摄像头模组焊接装置包括底座和与底座连接固定摄像头模组的焊接的托盘机构,该托盘机构包括托盘支架和设有多个可同步转动的固定条,该固定条的两端分别与托盘支架转动连接,在同一端设有使多个固定条同步转动的传动部件,该传动部件设有开口,该开口与驱动电机连接的偏心轮或摆臂配合,该托盘机构还包括限制传动部件移动的两个限位块,两个限位块分别位于传动部件两侧,且与托盘支架转动连接,在托盘支架和限位块之间设有复位部件。在焊接前固定模组时,由于两个限位块作用,方便固定,同时在

一种手机摄像头模组焊接自动固定装置.pdf
本发明公开了一种手机摄像头模组焊接自动固定装置包括底座和托盘机构,该托盘机构包括托盘支架和设有至少两个同步转动的固定条,该固定条的两端分别与托盘支架转动连接,在固定条同一端设有使每个固定条同步转动的传动部件,该传动部件设有开口,该开口与驱动电机连接的偏心轮或摆臂配合;在底座设有对托盘支架的两个角横向和纵向限位的限位机构和将托盘支架与限位机构压紧的固定气缸,以及至少两个确定是否放置托盘支架的位置传感,该位置传感与控制固定气缸运作和驱动电机转动的控制模块信号连接,当位置传感检测到托盘支架时,控制模块控制固定气

基于手机摄像头模组焊接的快速定位装置.pdf
本发明适用于摄像头模组焊接技术领域。本发明公开了一种基于手机摄像头模组焊接的快速定位装置,包括底座和与底座连接固定摄像头模组的托盘机构,在底座设有对托盘支架的两个角横向和纵向限位的限位机构和将托盘支架与限位机构压紧的固定气缸。使用时,托盘机构同一侧的两个角放置在两个限位机构位置,由固定气缸将托盘机构向限位机构方向推顶,在限位机构作用下实现固定。由于该限位机构在设置时位置固定,预留有恰好固定托盘机构的空间,使托盘机构不会出现在横向和纵向上移动。即仅对托盘机构的两个角进行固定,需要拆卸时,只需要将固定气缸的活
一种支架焊接固定装置及其焊接方法.pdf
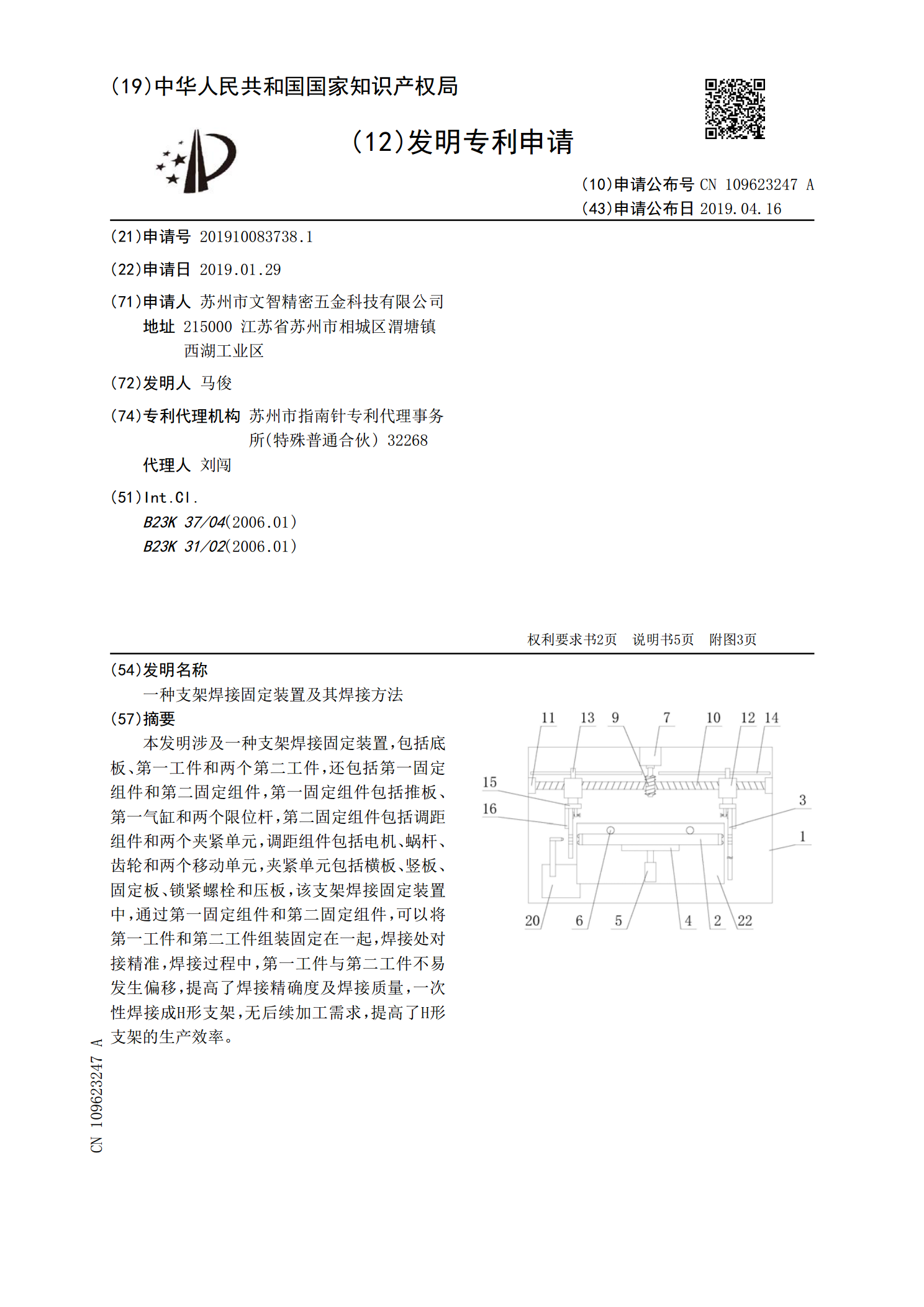
本发明涉及一种支架焊接固定装置,包括底板、第一工件和两个第二工件,还包括第一固定组件和第二固定组件,第一固定组件包括推板、第一气缸和两个限位杆,第二固定组件包括调距组件和两个夹紧单元,调距组件包括电机、蜗杆、齿轮和两个移动单元,夹紧单元包括横板、竖板、固定板、锁紧螺栓和压板,该支架焊接固定装置中,通过第一固定组件和第二固定组件,可以将第一工件和第二工件组装固定在一起,焊接处对接精准,焊接过程中,第一工件与第二工件不易发生偏移,提高了焊接精确度及焊接质量,一次性焊接成H形支架,无后续加工需求,提高了H形支架