
自动调节镜头位置的方法、镜头位置调节装置和投影仪.pdf

努力****甲寅

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动调节镜头位置的方法、镜头位置调节装置和投影仪.pdf
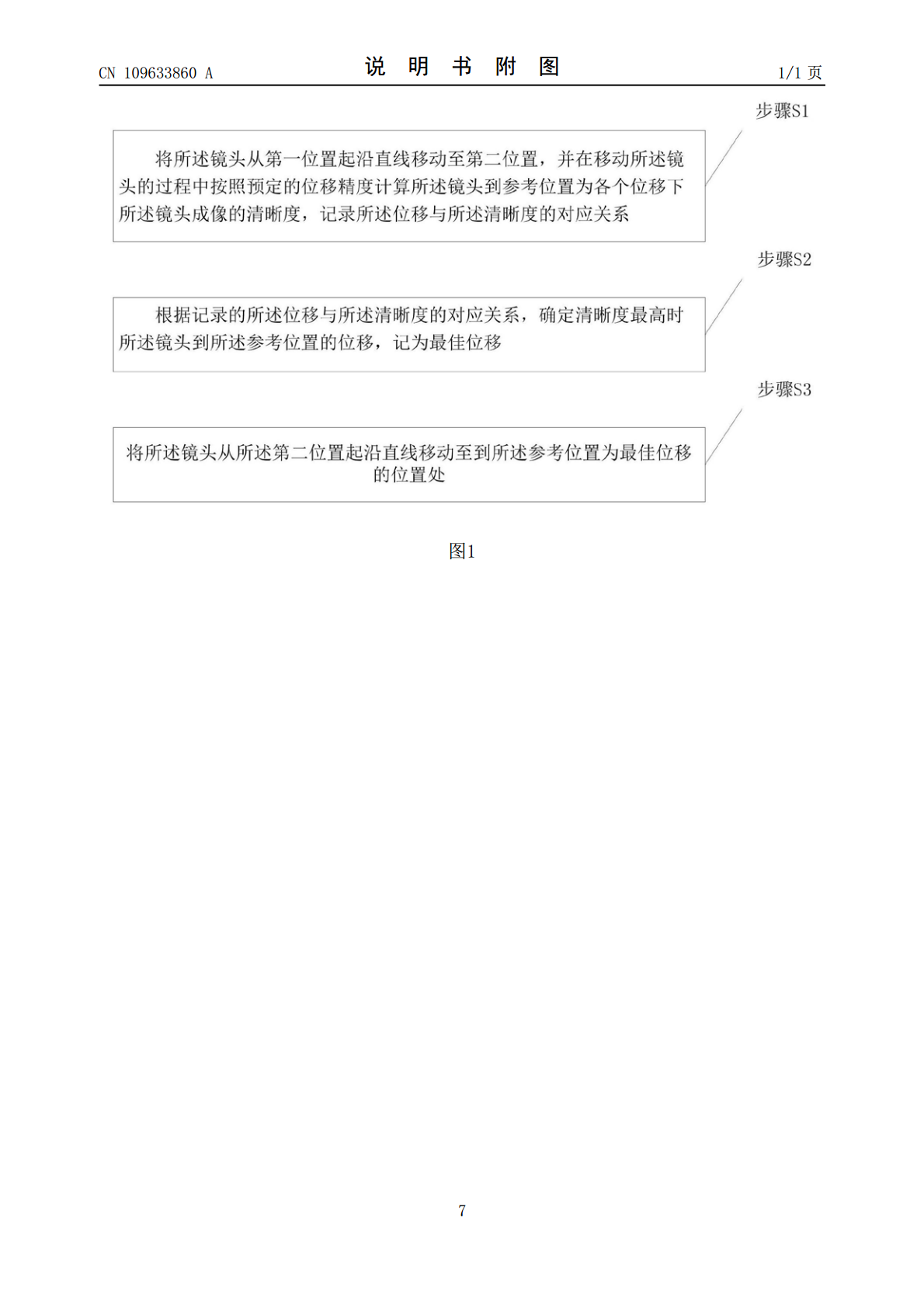
本发明本涉及光学设备及其对焦方法,具体涉及自动调节镜头位置的方法、镜头位置调节装置和投影仪。本发明自动调节镜头位置的方法包括:步骤S1:将所述镜头从第一位置起沿直线移动至第二位置,并在移动所述镜头的过程中按照预定的位移精度计算所述镜头到参考位置为各个位移下所述镜头成像的清晰度,记录所述位移与所述清晰度的对应关系;步骤S2:根据记录的所述位移与所述清晰度的对应关系,确定清晰度最高时所述镜头到所述参考位置的位移,记为最佳位移;步骤S3:将所述镜头从所述第二位置起沿直线移动至到所述参考位置为最佳位移的位置处。使
一种基于光敏电阻的投影仪镜头自动调节装置.pdf
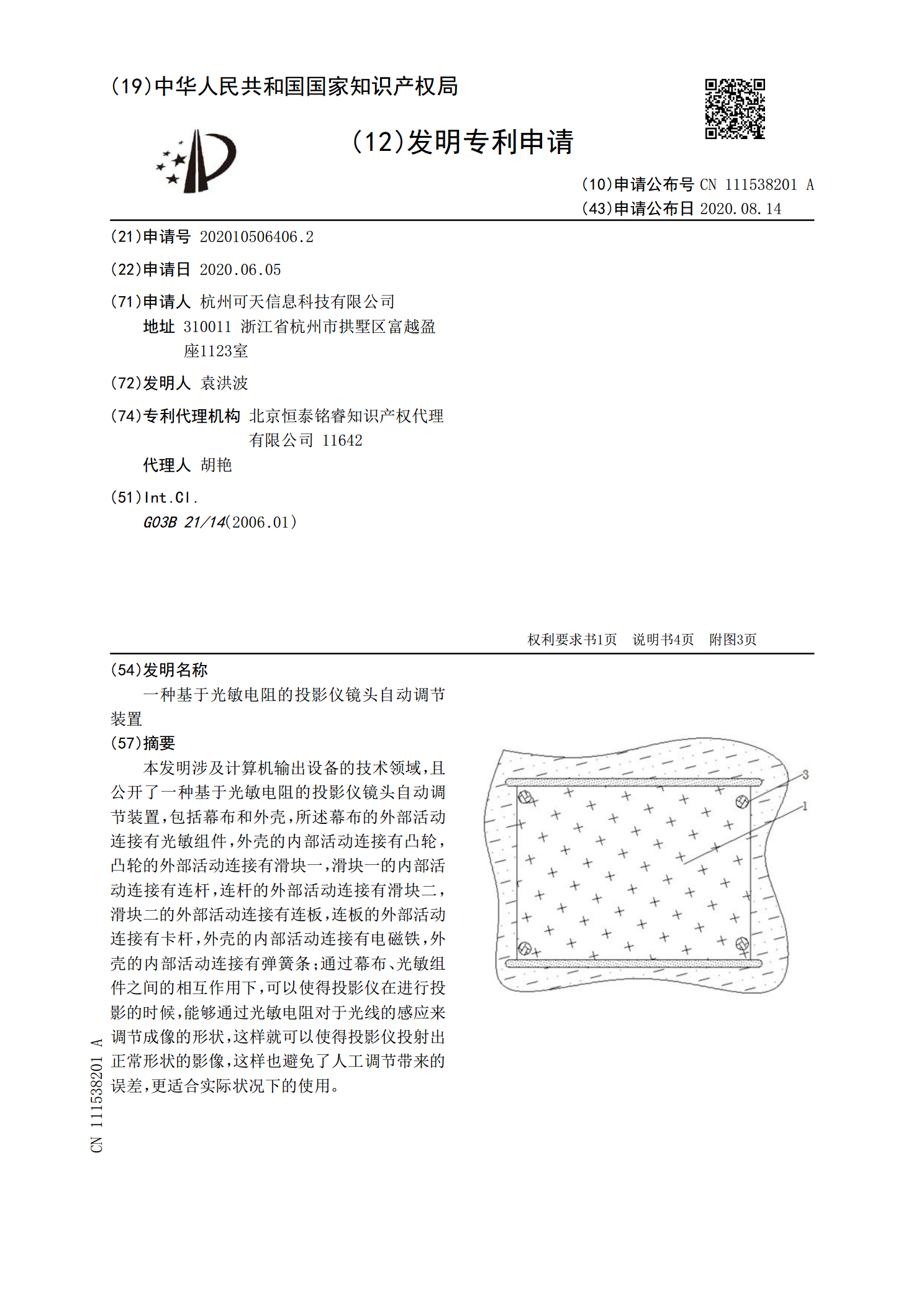
本发明涉及计算机输出设备的技术领域,且公开了一种基于光敏电阻的投影仪镜头自动调节装置,包括幕布和外壳,所述幕布的外部活动连接有光敏组件,外壳的内部活动连接有凸轮,凸轮的外部活动连接有滑块一,滑块一的内部活动连接有连杆,连杆的外部活动连接有滑块二,滑块二的外部活动连接有连板,连板的外部活动连接有卡杆,外壳的内部活动连接有电磁铁,外壳的内部活动连接有弹簧条;通过幕布、光敏组件之间的相互作用下,可以使得投影仪在进行投影的时候,能够通过光敏电阻对于光线的感应来调节成像的形状,这样就可以使得投影仪投射出正常形状的影
一种外置镜头调节方法、装置及外置镜头.pdf
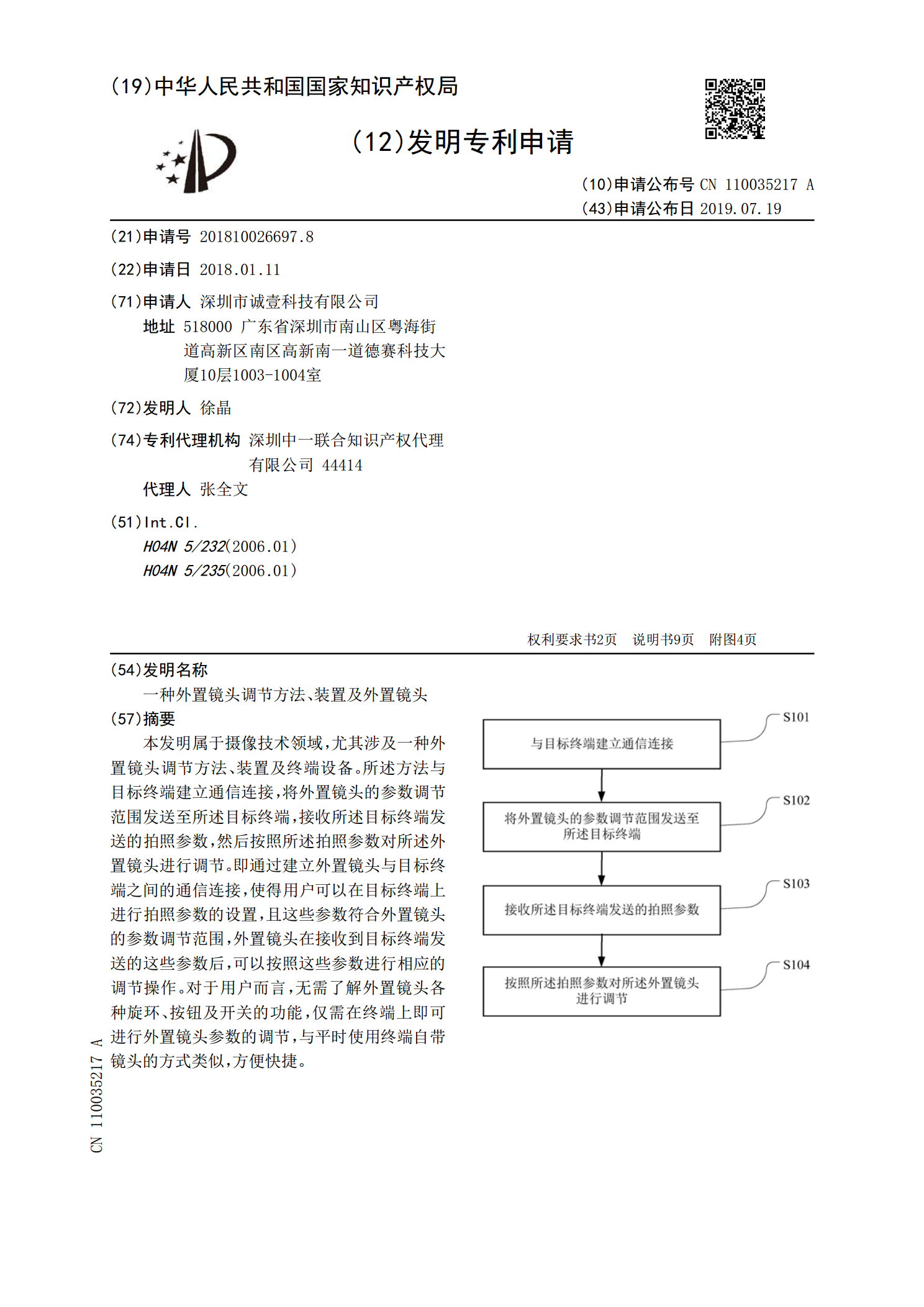
本发明属于摄像技术领域,尤其涉及一种外置镜头调节方法、装置及终端设备。所述方法与目标终端建立通信连接,将外置镜头的参数调节范围发送至所述目标终端,接收所述目标终端发送的拍照参数,然后按照所述拍照参数对所述外置镜头进行调节。即通过建立外置镜头与目标终端之间的通信连接,使得用户可以在目标终端上进行拍照参数的设置,且这些参数符合外置镜头的参数调节范围,外置镜头在接收到目标终端发送的这些参数后,可以按照这些参数进行相应的调节操作。对于用户而言,无需了解外置镜头各种旋环、按钮及开关的功能,仅需在终端上即可进行外置镜

镜头模组的调节装置.pdf
一种调节装置,用于调节一设有一调节杆的镜头模组,该调节装置包括一安装架、一安装于该安装架上的齿轮组、一固定于该安装架并驱动该齿轮组旋转的马达、一控制该马达旋转的控制器及一活动地安装于该安装架的调节件,该调节件包括一连接该调节杆的推动部,该控制器控制该马达旋动,该马达驱动该齿轮组转动,齿轮组驱动该调节件移动,进而调节该调节杆,从而实现自动调节该镜头模组,操作方便。

一种自动调节立体投影装置位置的装置和方法.pdf
本发明公开了一种自动调节立体投影位置的装置和方法,装置包括:立体投影装备(100)、光束分光器(141)、上光路反射器(131)、下光路反射器(132)、透镜(151)、上光路偏振状态调节器(121)、中光路偏振状态调节器(122)、下光路偏振状态调节器(123)、上光路液晶盒遮光装置(101)、中光路液晶盒遮光装置(102)、下光路液晶盒遮光装置(103)、液晶盒遮光装置控制模块(104)、上光路垂直调整电机(105)、上光路水平调整电机(106)、下光路垂直调整电机(107)、下光路水平调整电机(10