
一种伸缩臂叉装车配重计算方法.pdf

是丹****ni


1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种伸缩臂叉装车配重计算方法.pdf
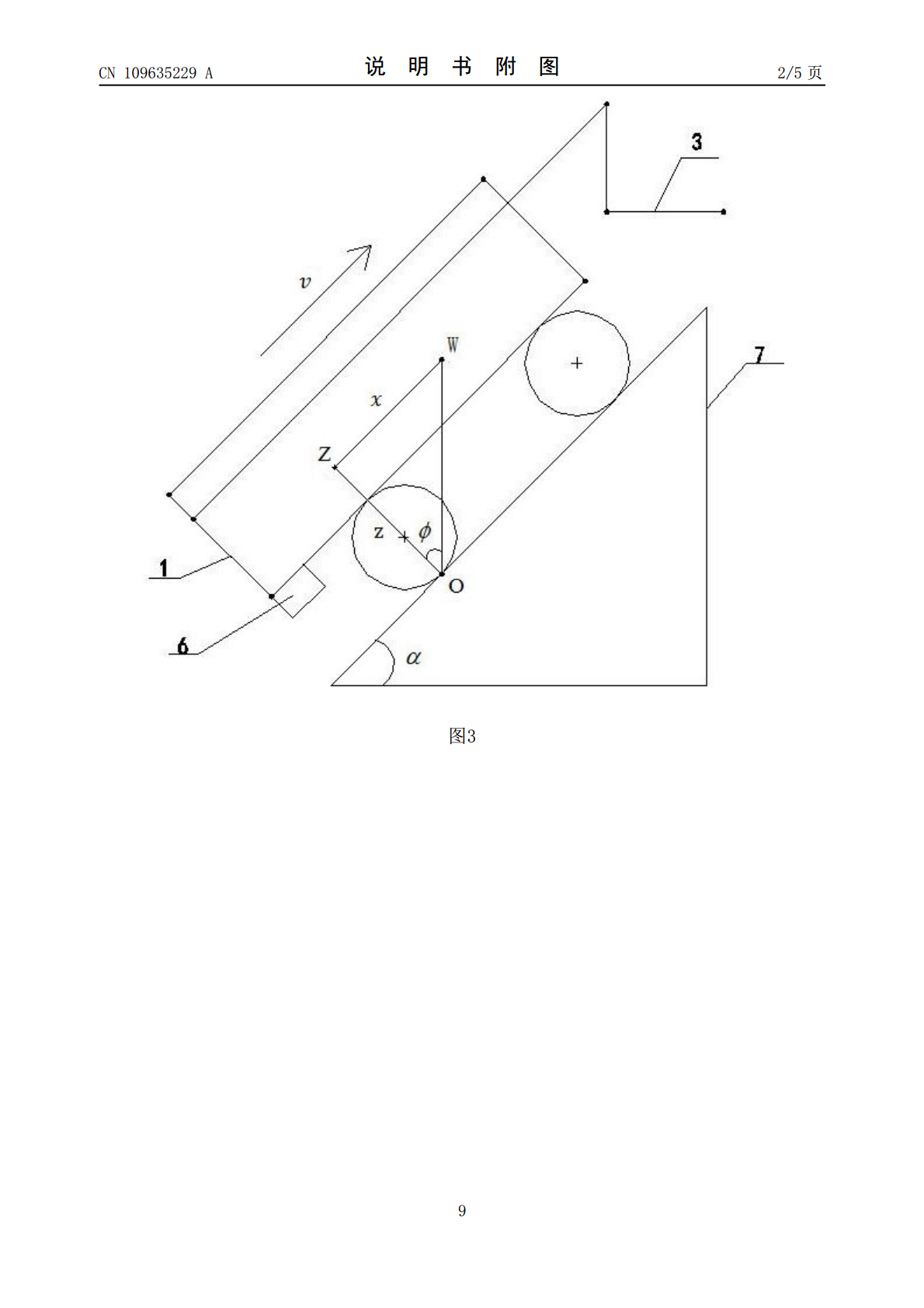
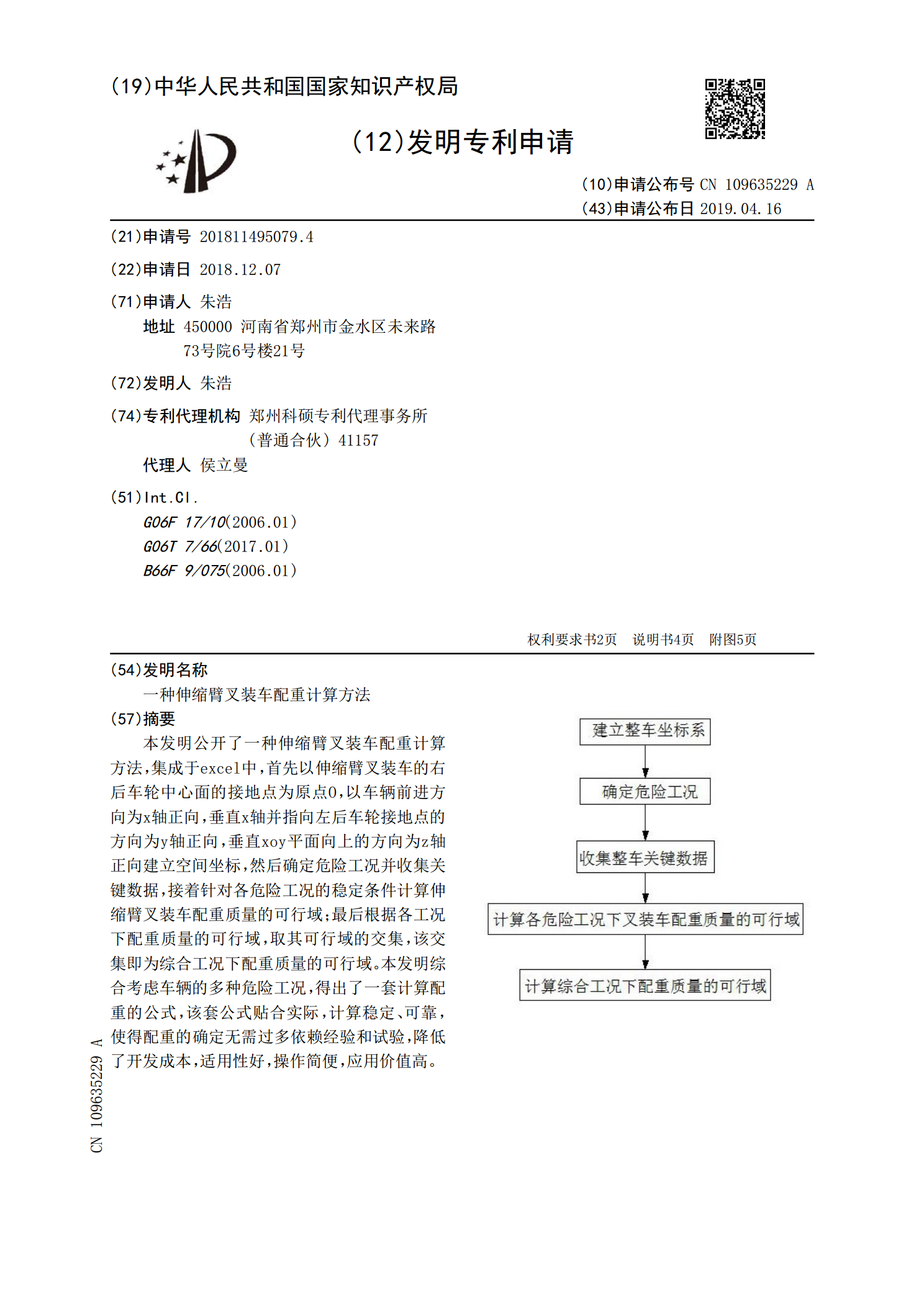
本发明公开了一种伸缩臂叉装车配重计算方法,集成于excel中,首先以伸缩臂叉装车的右后车轮中心面的接地点为原点O,以车辆前进方向为x轴正向,垂直x轴并指向左后车轮接地点的方向为y轴正向,垂直xoy平面向上的方向为z轴正向建立空间坐标,然后确定危险工况并收集关键数据,接着针对各危险工况的稳定条件计算伸缩臂叉装车配重质量的可行域;最后根据各工况下配重质量的可行域,取其可行域的交集,该交集即为综合工况下配重质量的可行域。本发明综合考虑车辆的多种危险工况,得出了一套计算配重的公式,该套公式贴合实际,计算稳定、可靠
全路面高速伸缩臂叉装车.pdf
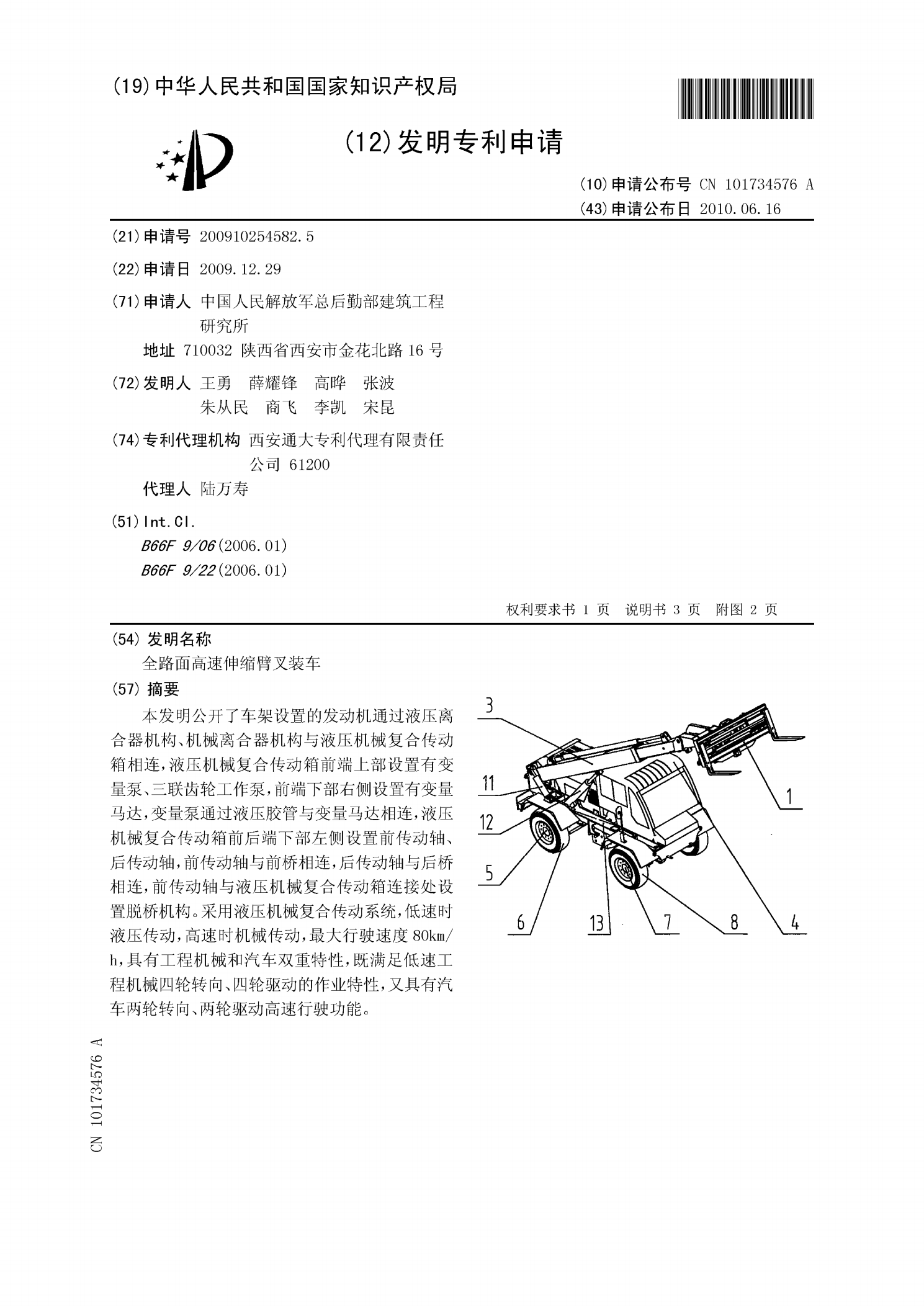
本发明公开了车架设置的发动机通过液压离合器机构、机械离合器机构与液压机械复合传动箱相连,液压机械复合传动箱前端上部设置有变量泵、三联齿轮工作泵,前端下部右侧设置有变量马达,变量泵通过液压胶管与变量马达相连,液压机械复合传动箱前后端下部左侧设置前传动轴、后传动轴,前传动轴与前桥相连,后传动轴与后桥相连,前传动轴与液压机械复合传动箱连接处设置脱桥机构。采用液压机械复合传动系统,低速时液压传动,高速时机械传动,最大行驶速度80km/h,具有工程机械和汽车双重特性,既满足低速工程机械四轮转向、四轮驱动的作业特性,

基于ADAMS的伸缩臂叉装车稳定性设计.docx
基于ADAMS的伸缩臂叉装车稳定性设计摘要为了保证伸缩臂叉装车在运行过程中的稳定性,本文以ADAMS软件为基础,进行了伸缩臂叉装车的稳定性设计。首先对伸缩臂叉装车的结构和运动原理进行了简要介绍,然后建立了伸缩臂叉装车的仿真模型,并进行了运动分析和力学分析。在此基础上,提出了一些优化措施,以提高伸缩臂叉装车的稳定性。最后,通过仿真实验验证了所提出的优化措施的有效性。本文的研究结果对于伸缩臂叉装车的设计和运行具有一定的参考价值。关键词:ADAMS,伸缩臂叉装车,稳定性设计,仿真实验引言伸缩臂叉装车是一种应用广

叉装车的伸缩臂结构设计与试验分析.pdf
3SL型伸缩臂叉装车的伸缩臂结构设计与试验分析TH401闫洪峰王志齐向阳谢建新温琦种洋陈文科副言作业场地的适应性,使其更适合在越野条件下使1伸缩臂的结构置,用以挂接各种田间作业机具等,在农业领域具有很好的应用前景。伸缩臂叉装车是一种具有多种作业功能的车辆,它将汽车起重机的伸缩臂式结构与传统叉装车的装卸功能有机地结合到一起,充分利用了伸缩臂式结构伸得高、伸得远的特点,在底盘不动的情况下,对离前轮较远的物资进行装卸作业。如对集装箱内物资的装箱、掏箱作业,由于无需进箱即可在箱外完成装卸作业,使作业效率大为提高。

伸缩臂叉装车作业稳定性分析.docx
伸缩臂叉装车作业稳定性分析伸缩臂叉装车作业稳定性是指在使用伸缩臂叉进行装卸作业时,保持车辆的平稳性和安全性的能力。伸缩臂叉装车作业是一种常见的物流装卸方式,应用广泛于货运、仓储等行业,但由于其特殊的工作原理和操作方式,存在一定的安全隐患。因此,保障伸缩臂叉装车作业的稳定性对于提高作业效率和保障工作人员安全至关重要。首先,伸缩臂叉装车作业的稳定性受到以下几个因素影响:1.载重能力:伸缩臂叉车的载重能力是指车辆能够承受的最大重量。在装卸作业过程中,如果超过了车辆的载重能力,会导致车辆失去平衡,引发安全事故。因