
一种车辆运动数据获取方法、装置、设备和存储介质.pdf

桂香****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆运动数据获取方法、装置、设备和存储介质.pdf
本发明公开了一种车辆运动数据获取方法、装置、设备和存储介质,该方法包括:采用陀螺仪分别获取车体和车轮的转动角速度值,得到所述车轮相对所述车体的相对转动角速度值,进而获取所述车辆的车轮第一转角;采用区别于所述陀螺仪的测量部件获取所述车轮相对所述车体的转动角度值作为所述车辆的车轮第二转角;在满足修正条件时,使用所述第二转角对所述第一转角进行修正,并将修正结果作为所述车辆的车轮转角。本发明实施例的技术方案,通过陀螺仪获取到车轮的角速度值,并在设定条件下通过由其它测量部件获取到的转角对由陀螺仪获取的转角进行修正,
数据获取方法、装置、车辆、存储介质和电子设备.pdf
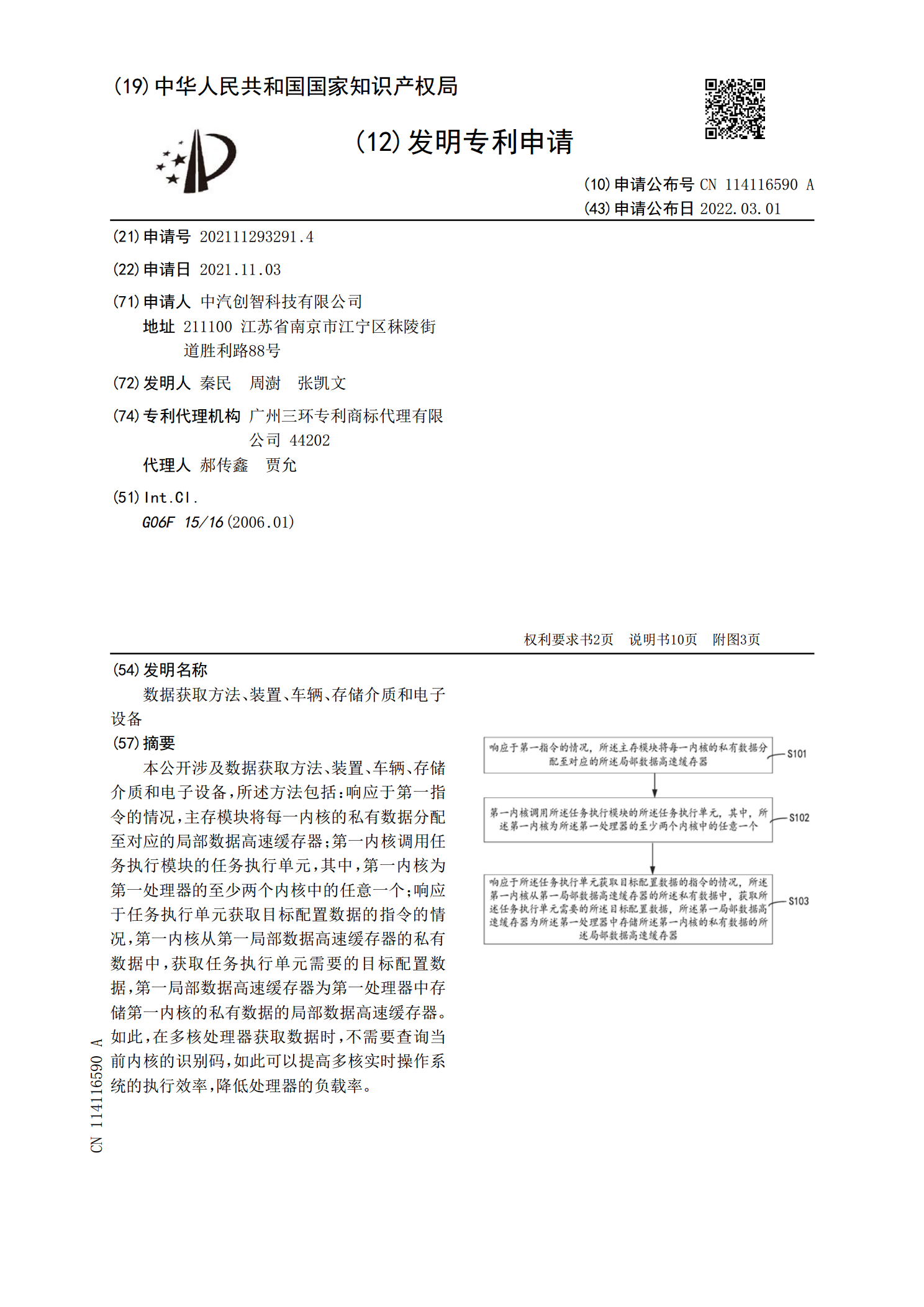
本公开涉及数据获取方法、装置、车辆、存储介质和电子设备,所述方法包括:响应于第一指令的情况,主存模块将每一内核的私有数据分配至对应的局部数据高速缓存器;第一内核调用任务执行模块的任务执行单元,其中,第一内核为第一处理器的至少两个内核中的任意一个;响应于任务执行单元获取目标配置数据的指令的情况,第一内核从第一局部数据高速缓存器的私有数据中,获取任务执行单元需要的目标配置数据,第一局部数据高速缓存器为第一处理器中存储第一内核的私有数据的局部数据高速缓存器。如此,在多核处理器获取数据时,不需要查询当前内核的识别
数据获取方法、装置、设备和存储介质.pdf
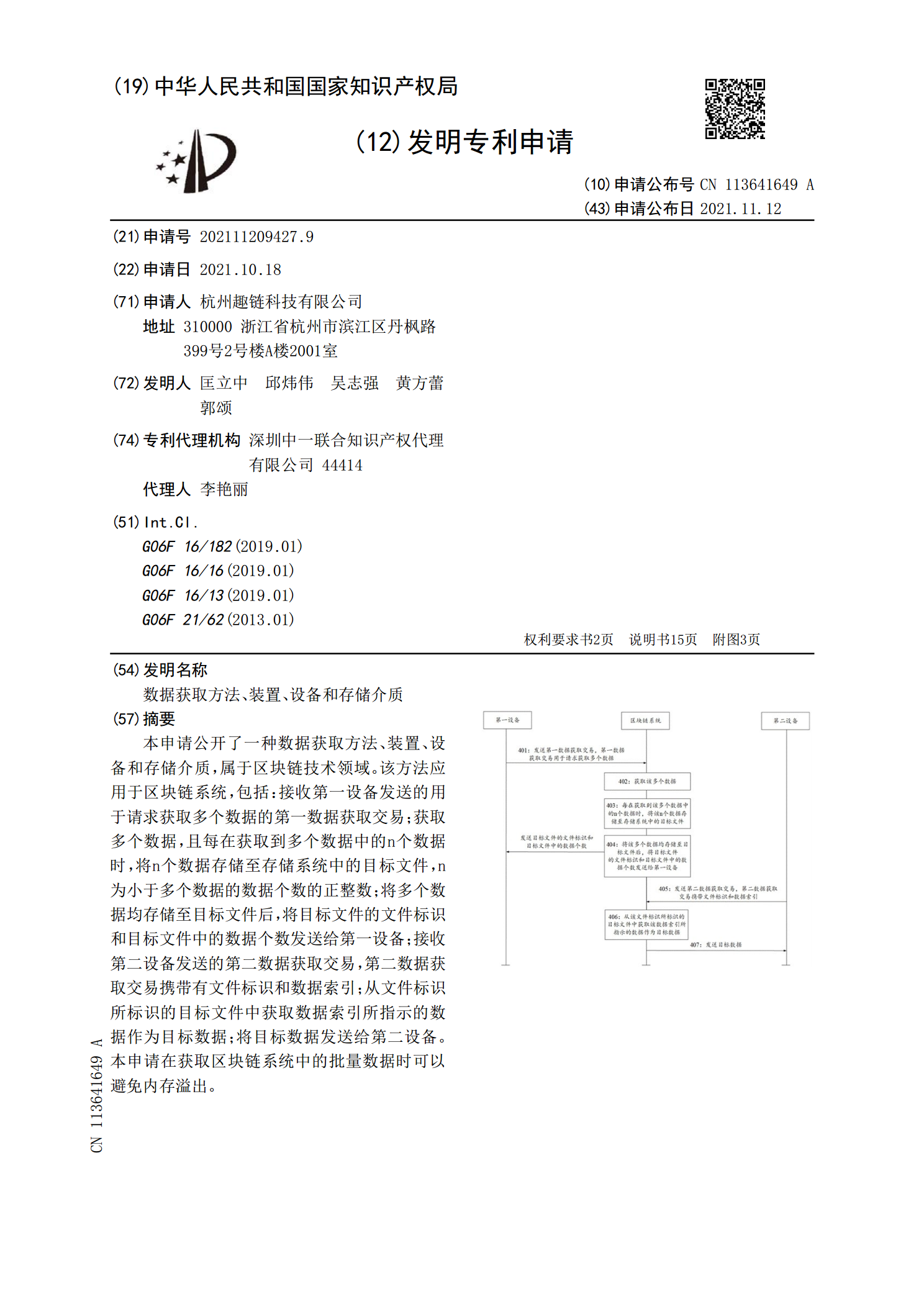
本申请公开了一种数据获取方法、装置、设备和存储介质,属于区块链技术领域。该方法应用于区块链系统,包括:接收第一设备发送的用于请求获取多个数据的第一数据获取交易;获取多个数据,且每在获取到多个数据中的n个数据时,将n个数据存储至存储系统中的目标文件,n为小于多个数据的数据个数的正整数;将多个数据均存储至目标文件后,将目标文件的文件标识和目标文件中的数据个数发送给第一设备;接收第二设备发送的第二数据获取交易,第二数据获取交易携带有文件标识和数据索引;从文件标识所标识的目标文件中获取数据索引所指示的数据作为目标

车辆控制数据的获取方法、车辆和存储介质.pdf
本发明公开了一种车辆控制数据的获取方法、车辆和存储介质。该车辆控制数据的获取方法包括:建立车辆控制部件对应的虚拟输入设备并配置虚拟设备参数;响应于监听到车辆控制部件对应的车辆属性编码信息,上报事件报文;解析事件报文得到输入事件信息;在输入事件信息满足条件的情况下,根据输入事件信息将标准的输入事件数据写入虚拟输入设备,以使得车载系统可以从虚拟输入设备获取车辆控制数据。本发明在车辆端将车辆控制部件模拟成一个标准的虚拟输入设备接入安卓系统,根据输入事件信息将标准的输入事件数据写入虚拟输入设备的节点,以使得车载系
一种数据获取方法、装置、设备和存储介质.pdf
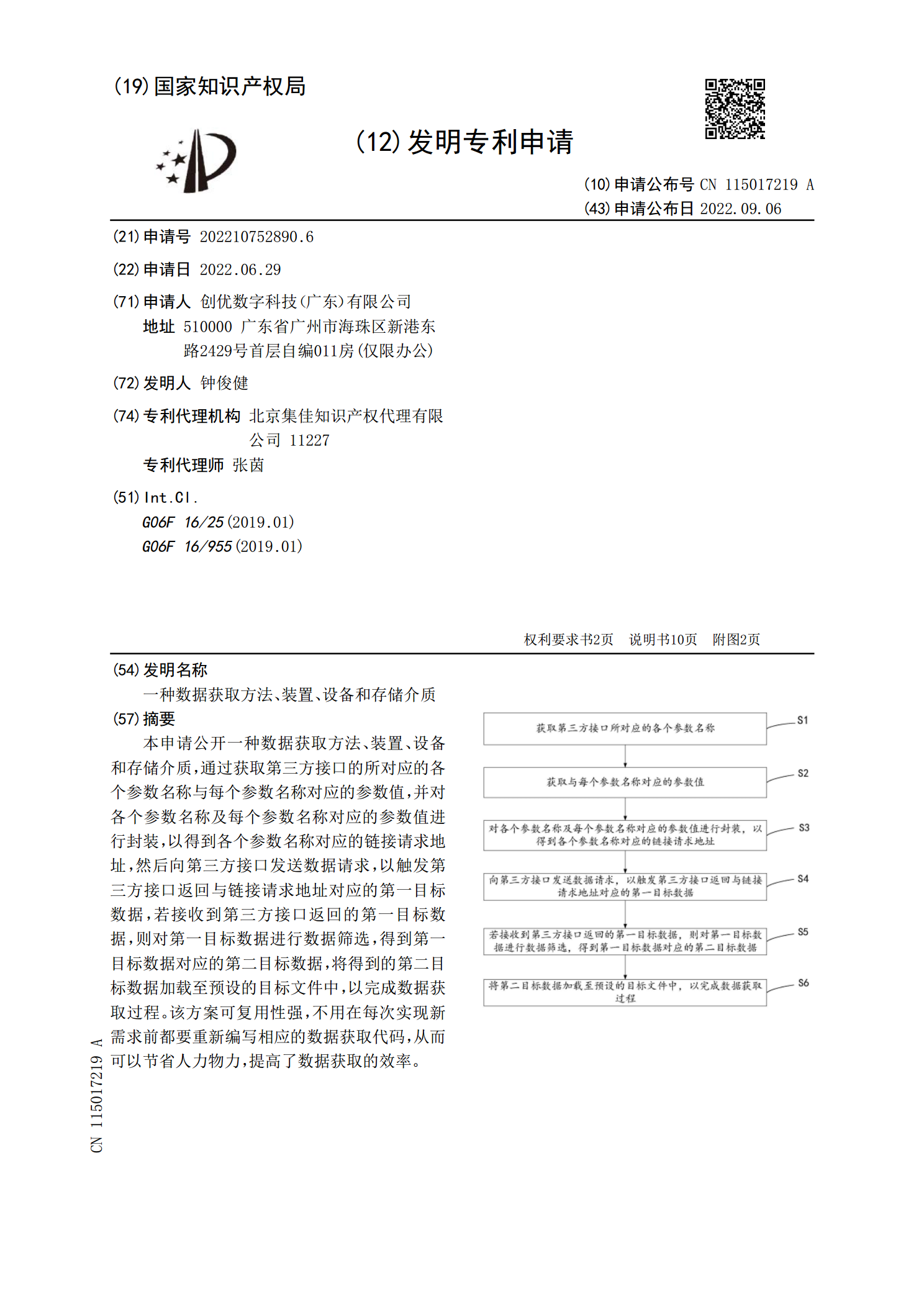
本申请公开一种数据获取方法、装置、设备和存储介质,通过获取第三方接口的所对应的各个参数名称与每个参数名称对应的参数值,并对各个参数名称及每个参数名称对应的参数值进行封装,以得到各个参数名称对应的链接请求地址,然后向第三方接口发送数据请求,以触发第三方接口返回与链接请求地址对应的第一目标数据,若接收到第三方接口返回的第一目标数据,则对第一目标数据进行数据筛选,得到第一目标数据对应的第二目标数据,将得到的第二目标数据加载至预设的目标文件中,以完成数据获取过程。该方案可复用性强,不用在每次实现新需求前都要重新编