
一种塔筒自动清洗装置及清洗方法.pdf

雨巷****珺琦


1/8

2/8

3/8

4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种塔筒自动清洗装置及清洗方法.pdf
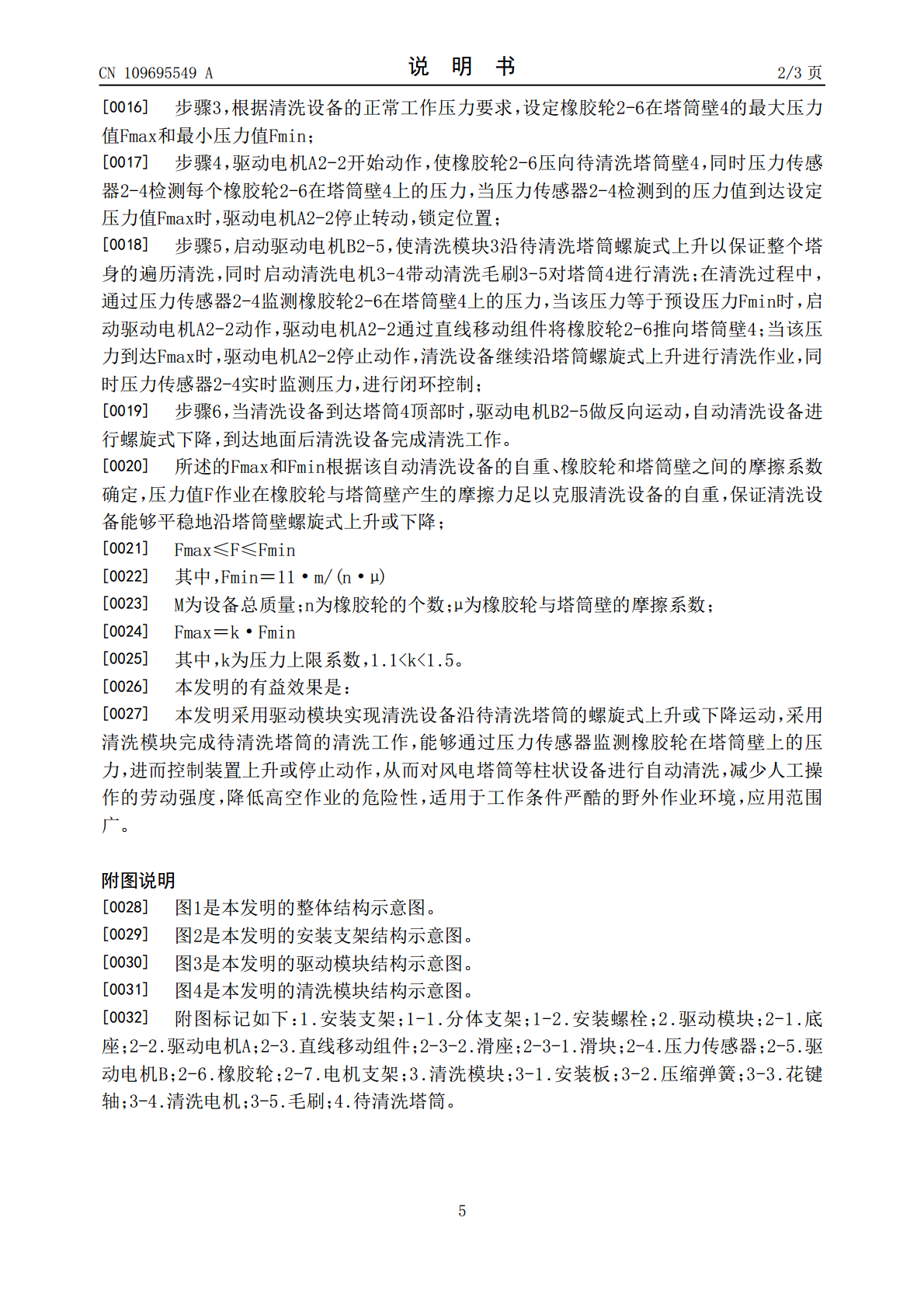
一种塔筒自动清洗装置及清洗方法,包括固定在待清洗塔筒外围的安装支架,安装支架上固定有驱动模块和清洗模块,驱动模块包括直线移动组件,直线移动组件的滑座固定连接在安装支架上,直线移动组件上安装有驱动电机,驱动电机输出轴连接直线移动组件的输入轴,直线移动组件的滑块与电机支架连接,电机支架与驱动电机的定子连接,橡胶轮与驱动电机的转子连接,直线移动组件与电机支架之间固定设有压力传感器,清洗模块包括固定在安装支架上的清洗电机,清洗电机的输出轴上安装有花键轴,花键轴的轴端前部安装有清洗毛刷,完成塔筒的清洗工作,采用驱动
一种风力发电塔筒自动清洗装置.pdf
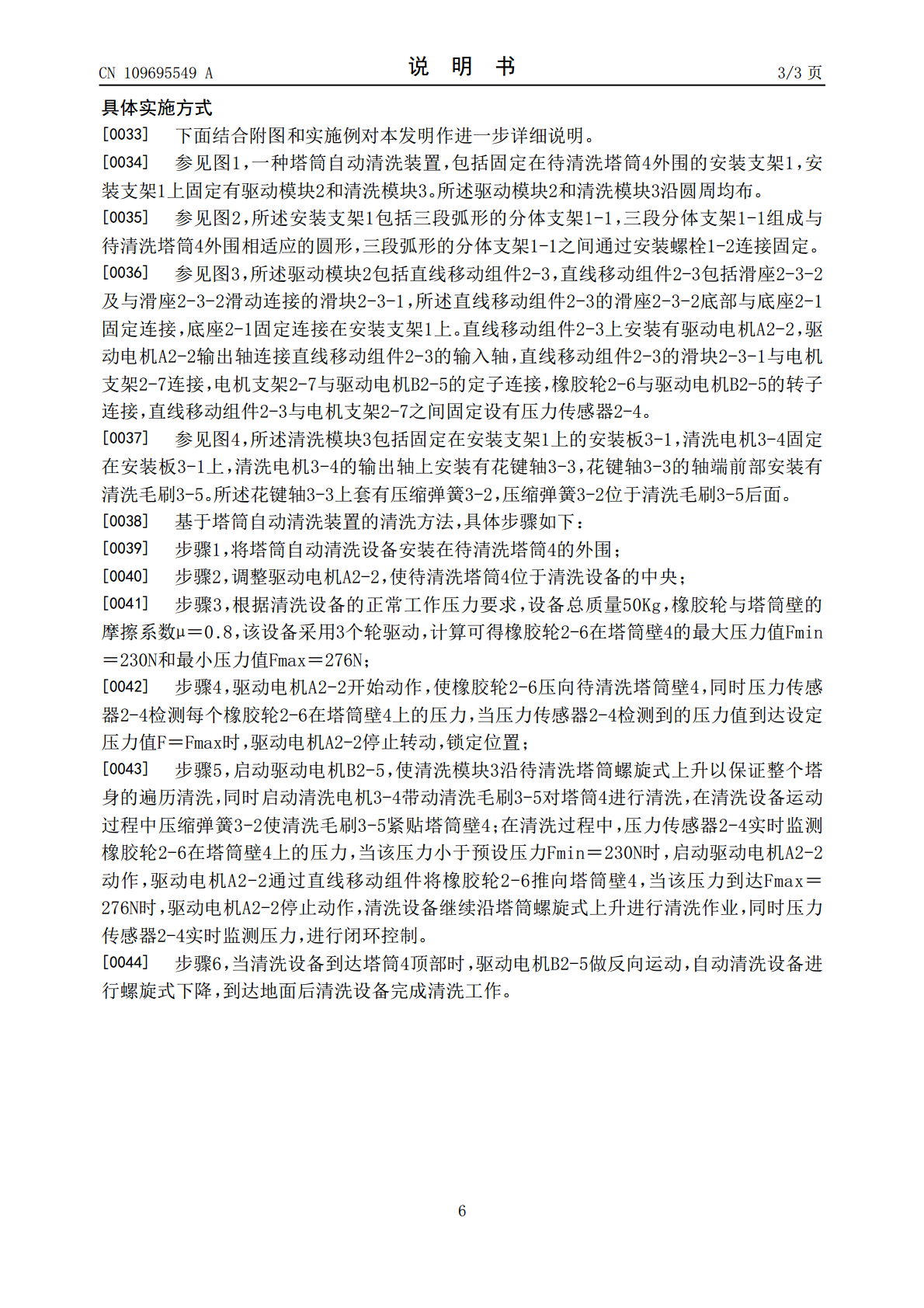
本发明提供一种风力发电塔筒自动清洗装置,包括圆形机架、履带机构、液压缸Ⅰ、清洗机构和滚轮,四个履带机构分别通过液压缸Ⅰ活动安装在圆形机架的底部,清洗机构中的镂空转盘通过滚轮转动安装在圆形机架内,镂空齿轮安装在镂空转盘的底部,齿轮安装在电机Ⅰ上并与镂空齿轮相互啮合,清洗组件活动安装在镂空转盘。通过液压缸Ⅰ推动履带机构使得履带机构能够是实现平移式运动以及能够发生偏移,进而使得履带机构能够贴合在不同尺寸以及圆柱式的塔筒上,通过液压缸Ⅱ带动支架运动,使得毛刷能够靠近或远离塔筒,并且毛刷支架与之间设有扭簧进而毛刷能

风机塔筒清洗装置.pdf
本发明公开了一种风机塔筒清洗装置,包括壳体、高压气罐、缸体和清洗刷,壳体为底部开口的空腔壳,壳体下端设置有轮子,壳体的下端设置有磁铁,高压气罐设置在壳体外表面,缸体设置在壳体的空腔内部,缸体内通过支撑轴转动连接有涡轮,缸体的内腔通过第一连接管与高压气罐连通,清洗刷连接在所述支撑轴靠近壳体底端面的一端,壳体内设置有蓄电池、动力装置和控制器。本发明的风机塔筒清洗装置,清洗过程不影响发电量,避免了工人高空作业的风险,清洗成本低。

一种工艺空调滤筒自动清洗装置.pdf
本发明涉及一种工艺空调滤筒自动清洗装置,包括箱体、控制面板、洗涤剂容器、洗涤剂电磁阀、清洗水电磁阀、压缩空气电磁阀、外清洗水喷管、内清洗水喷管、外压缩空气喷管、内压缩空气喷管、支撑架及轴承。本发明结构及操作简单,使用方便,外观精美,坚固耐用,洗涤彻底,安全高效,节约能源,使用方便,水汽互补,大大提升了滤筒的清洗效率并设有洗涤完成后的提醒功能,洗涤时间可以根据滤筒的脏污程度随意调整。同时,还减少了操作人员的体力劳动,也节约了大量资金的投入和水资源的浪费,提高了滤筒除尘的效率和使用寿命。
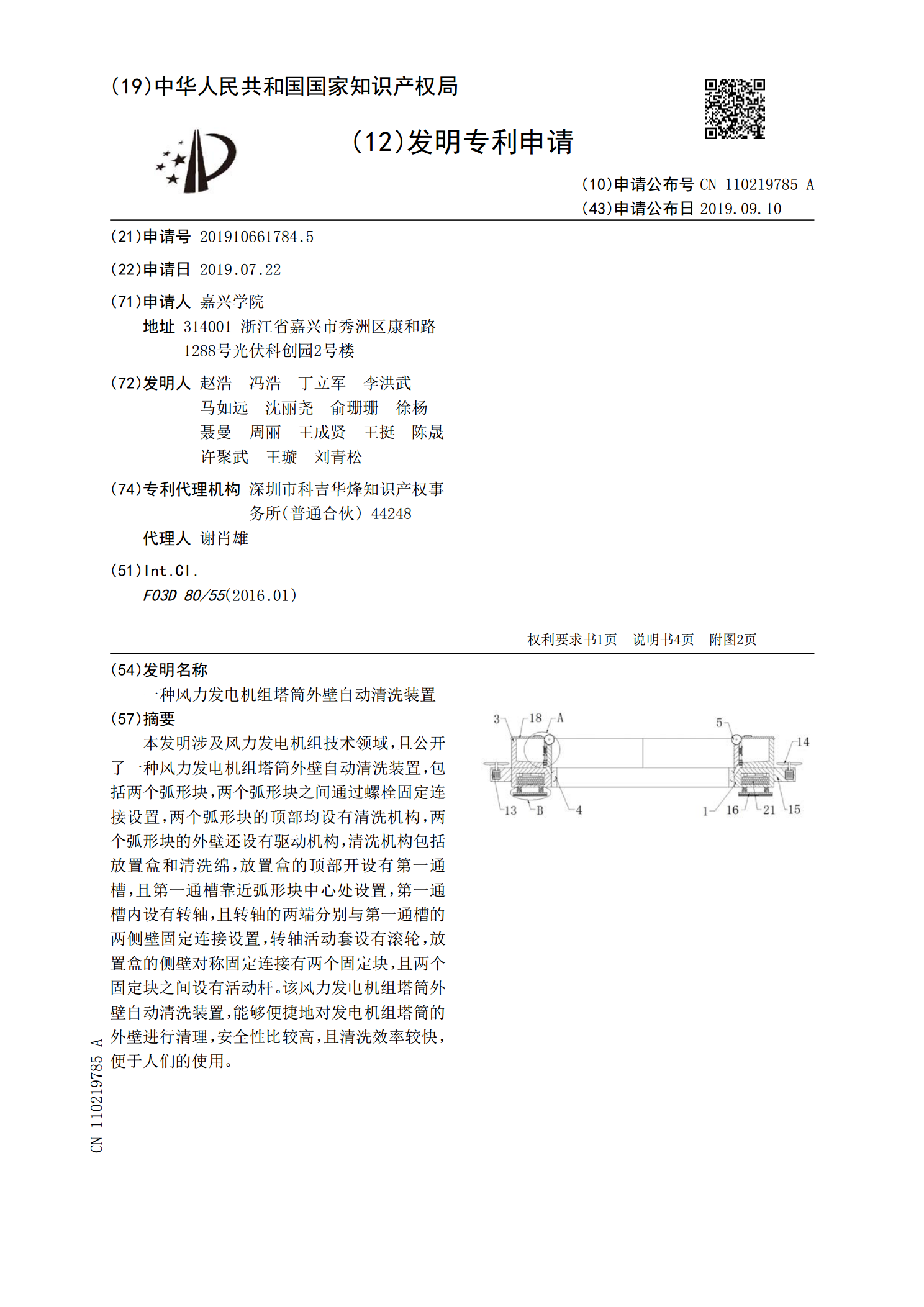
一种风力发电机组塔筒外壁自动清洗装置.pdf
本发明涉及风力发电机组技术领域,且公开了一种风力发电机组塔筒外壁自动清洗装置,包括两个弧形块,两个弧形块之间通过螺栓固定连接设置,两个弧形块的顶部均设有清洗机构,两个弧形块的外壁还设有驱动机构,清洗机构包括放置盒和清洗绵,放置盒的顶部开设有第一通槽,且第一通槽靠近弧形块中心处设置,第一通槽内设有转轴,且转轴的两端分别与第一通槽的两侧壁固定连接设置,转轴活动套设有滚轮,放置盒的侧壁对称固定连接有两个固定块,且两个固定块之间设有活动杆。该风力发电机组塔筒外壁自动清洗装置,能够便捷地对发电机组塔筒的外壁进行清理