
宠物状态监测方法和装置.pdf

是湛****21


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
宠物状态监测方法和装置.pdf
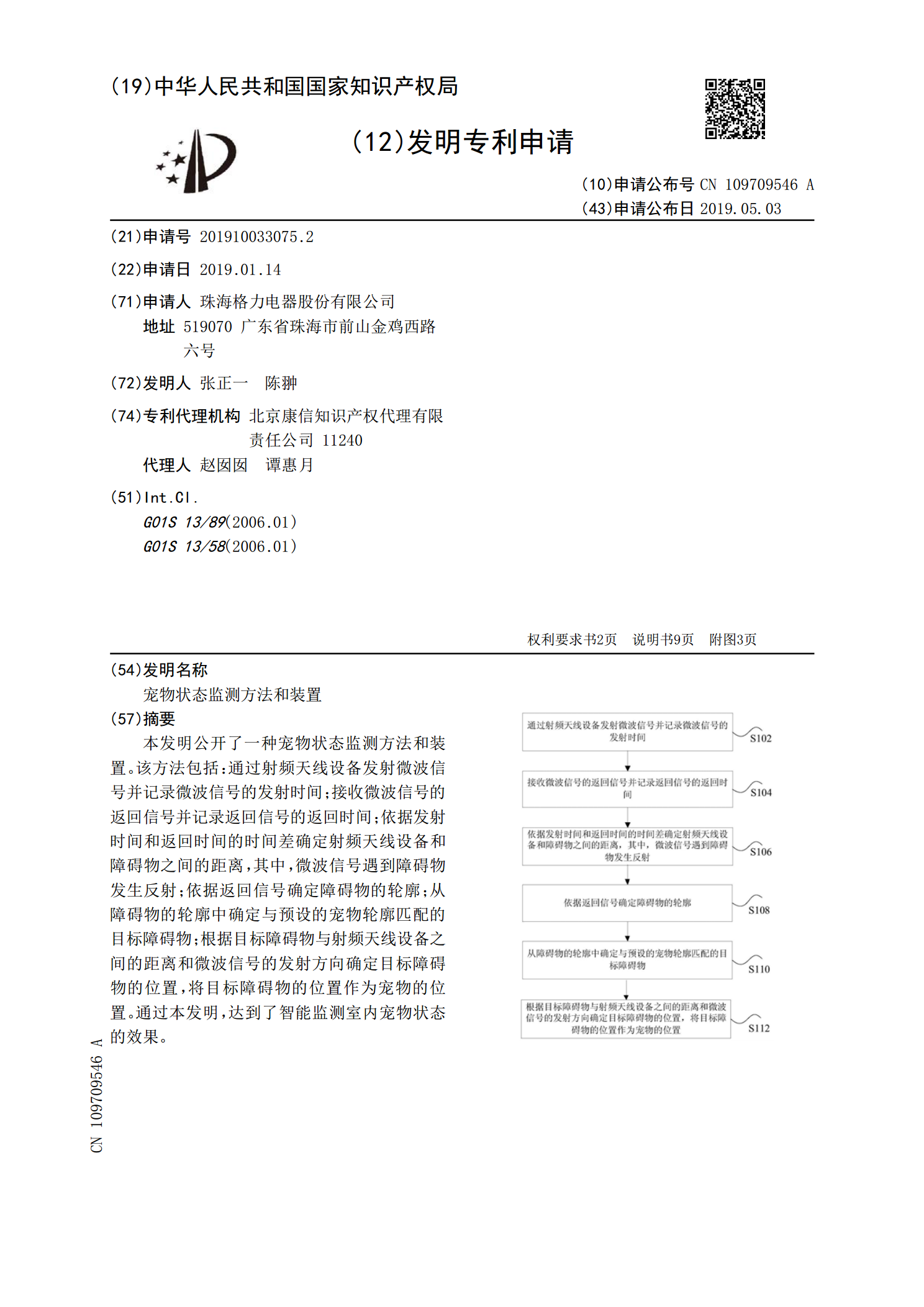
本发明公开了一种宠物状态监测方法和装置。该方法包括:通过射频天线设备发射微波信号并记录微波信号的发射时间;接收微波信号的返回信号并记录返回信号的返回时间;依据发射时间和返回时间的时间差确定射频天线设备和障碍物之间的距离,其中,微波信号遇到障碍物发生反射;依据返回信号确定障碍物的轮廓;从障碍物的轮廓中确定与预设的宠物轮廓匹配的目标障碍物;根据目标障碍物与射频天线设备之间的距离和微波信号的发射方向确定目标障碍物的位置,将目标障碍物的位置作为宠物的位置。通过本发明,达到了智能监测室内宠物状态的效果。
节点状态的监测方法、控制装置和监测装置.pdf
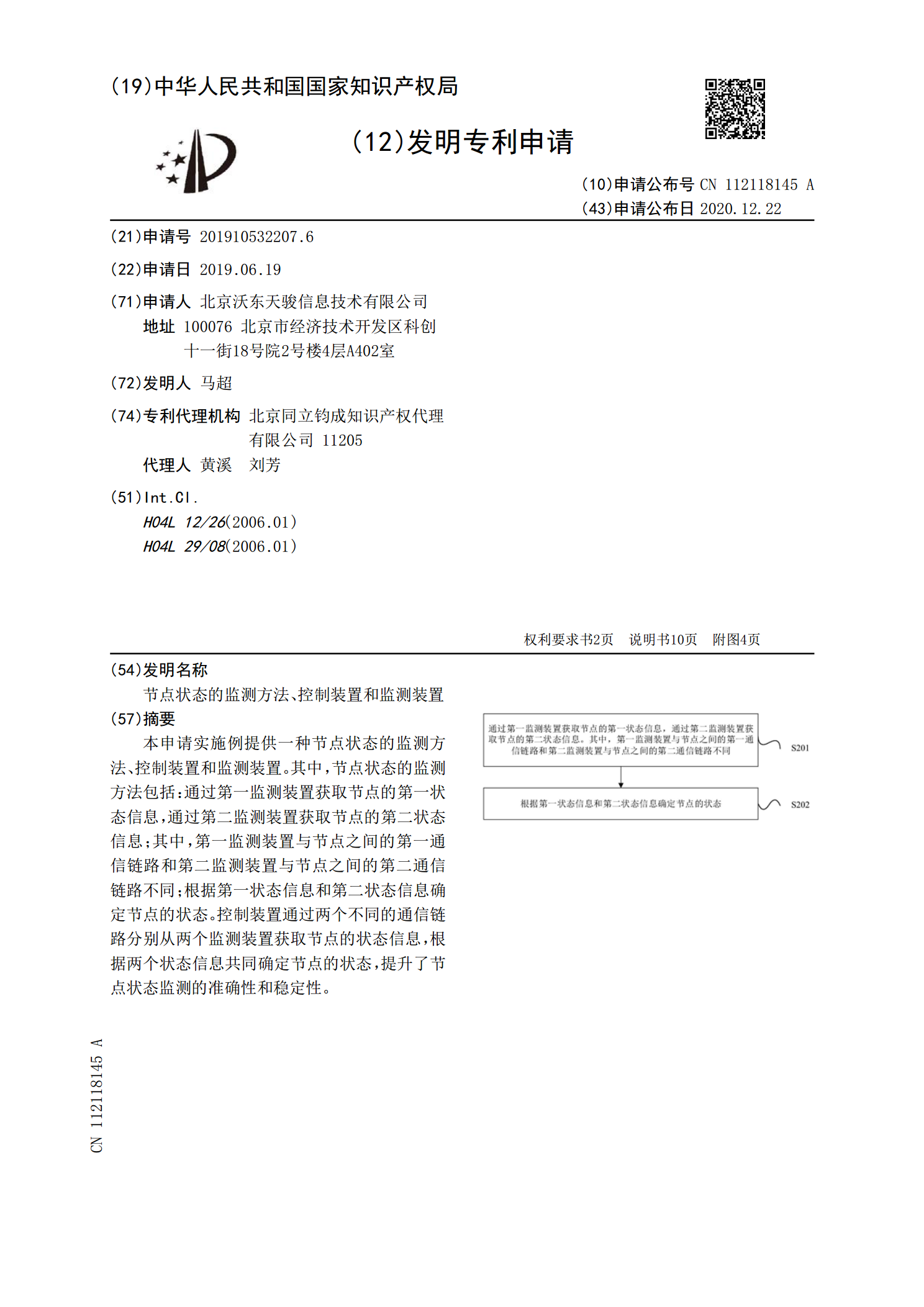
本申请实施例提供一种节点状态的监测方法、控制装置和监测装置。其中,节点状态的监测方法包括:通过第一监测装置获取节点的第一状态信息,通过第二监测装置获取节点的第二状态信息;其中,第一监测装置与节点之间的第一通信链路和第二监测装置与节点之间的第二通信链路不同;根据第一状态信息和第二状态信息确定节点的状态。控制装置通过两个不同的通信链路分别从两个监测装置获取节点的状态信息,根据两个状态信息共同确定节点的状态,提升了节点状态监测的准确性和稳定性。
接地挂接位置和状态监测方法、装置和系统.pdf
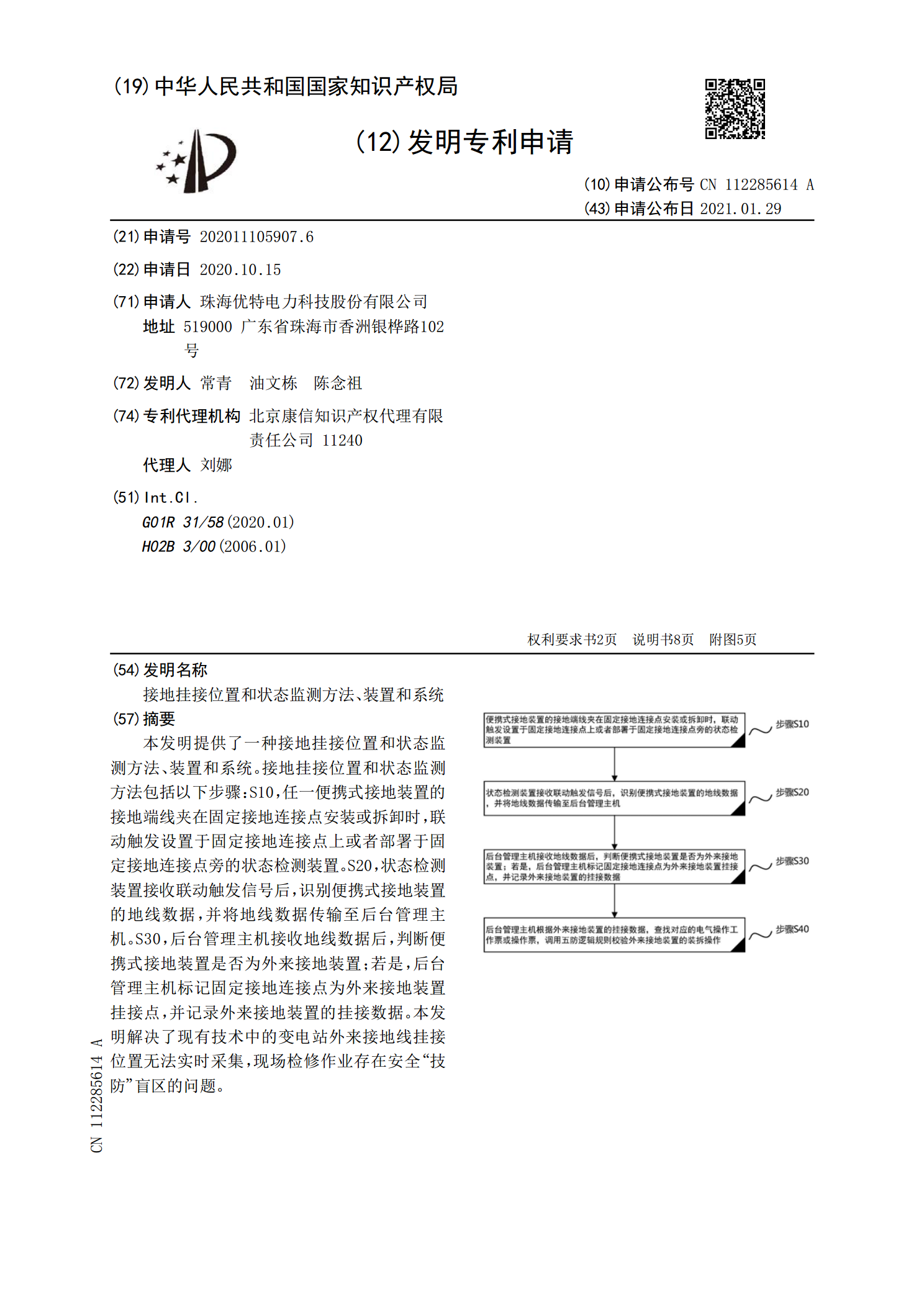
本发明提供了一种接地挂接位置和状态监测方法、装置和系统。接地挂接位置和状态监测方法包括以下步骤:S10,任一便携式接地装置的接地端线夹在固定接地连接点安装或拆卸时,联动触发设置于固定接地连接点上或者部署于固定接地连接点旁的状态检测装置。S20,状态检测装置接收联动触发信号后,识别便携式接地装置的地线数据,并将地线数据传输至后台管理主机。S30,后台管理主机接收地线数据后,判断便携式接地装置是否为外来接地装置;若是,后台管理主机标记固定接地连接点为外来接地装置挂接点,并记录外来接地装置的挂接数据。本发明解决
状态控制方法、轮胎压力监测装置和系统.pdf
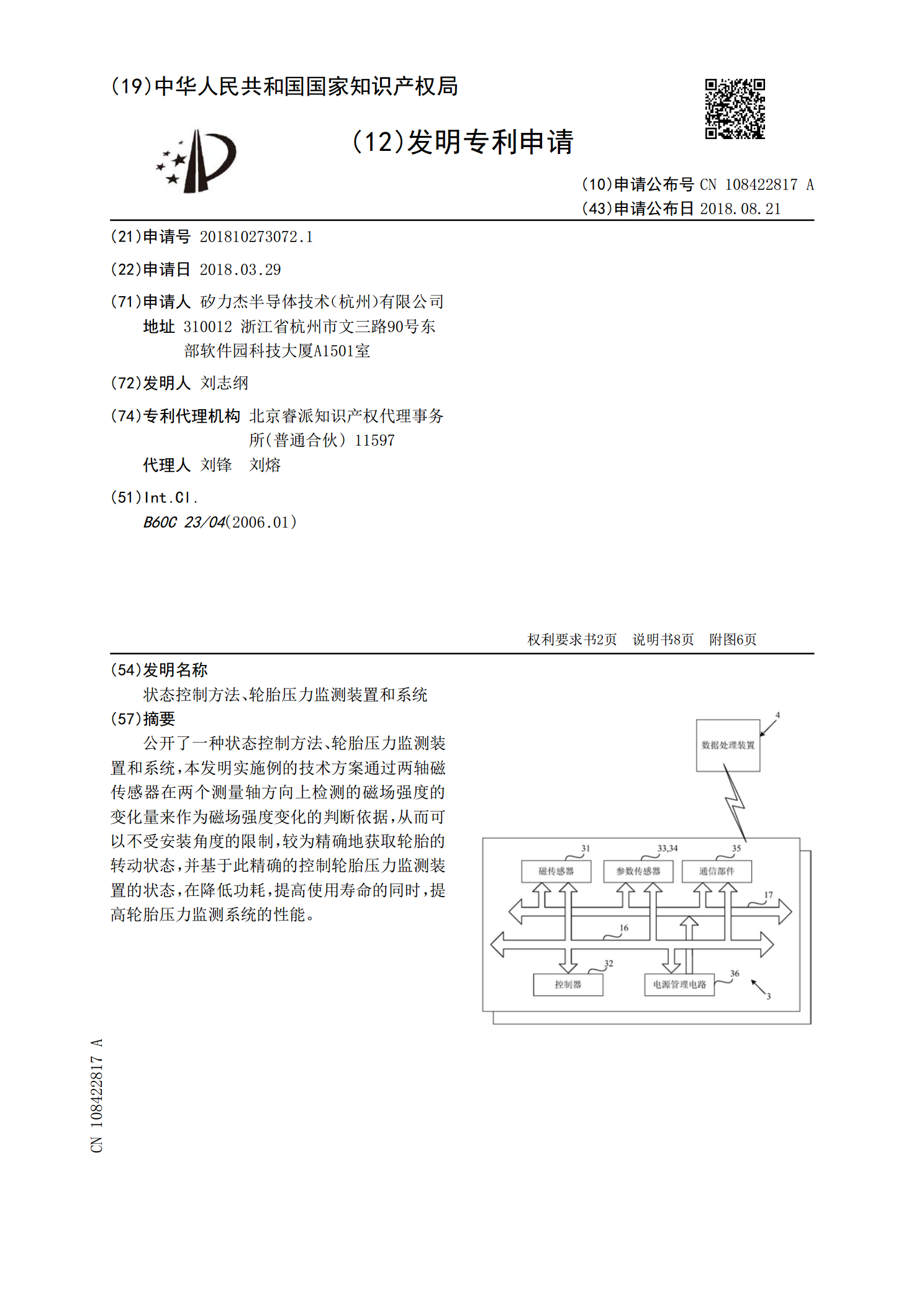
公开了一种状态控制方法、轮胎压力监测装置和系统,本发明实施例的技术方案通过两轴磁传感器在两个测量轴方向上检测的磁场强度的变化量来作为磁场强度变化的判断依据,从而可以不受安装角度的限制,较为精确地获取轮胎的转动状态,并基于此精确的控制轮胎压力监测装置的状态,在降低功耗,提高使用寿命的同时,提高轮胎压力监测系统的性能。
轮胎状态监测装置及方法.pdf
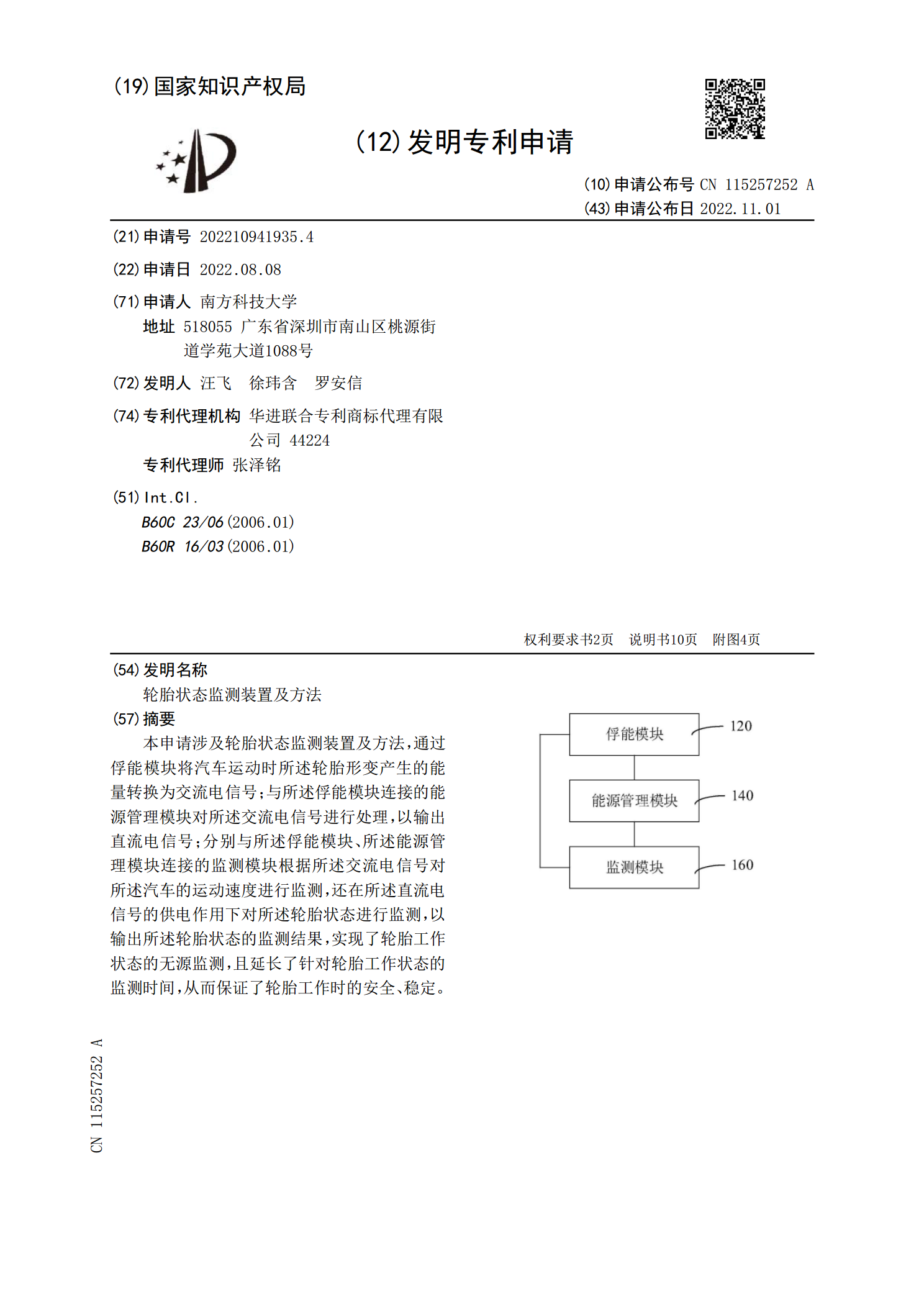
本申请涉及轮胎状态监测装置及方法,通过俘能模块将汽车运动时所述轮胎形变产生的能量转换为交流电信号;与所述俘能模块连接的能源管理模块对所述交流电信号进行处理,以输出直流电信号;分别与所述俘能模块、所述能源管理模块连接的监测模块根据所述交流电信号对所述汽车的运动速度进行监测,还在所述直流电信号的供电作用下对所述轮胎状态进行监测,以输出所述轮胎状态的监测结果,实现了轮胎工作状态的无源监测,且延长了针对轮胎工作状态的监测时间,从而保证了轮胎工作时的安全、稳定。