
一种亚像素边缘检测方法及系统.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种亚像素边缘检测方法及系统.pdf
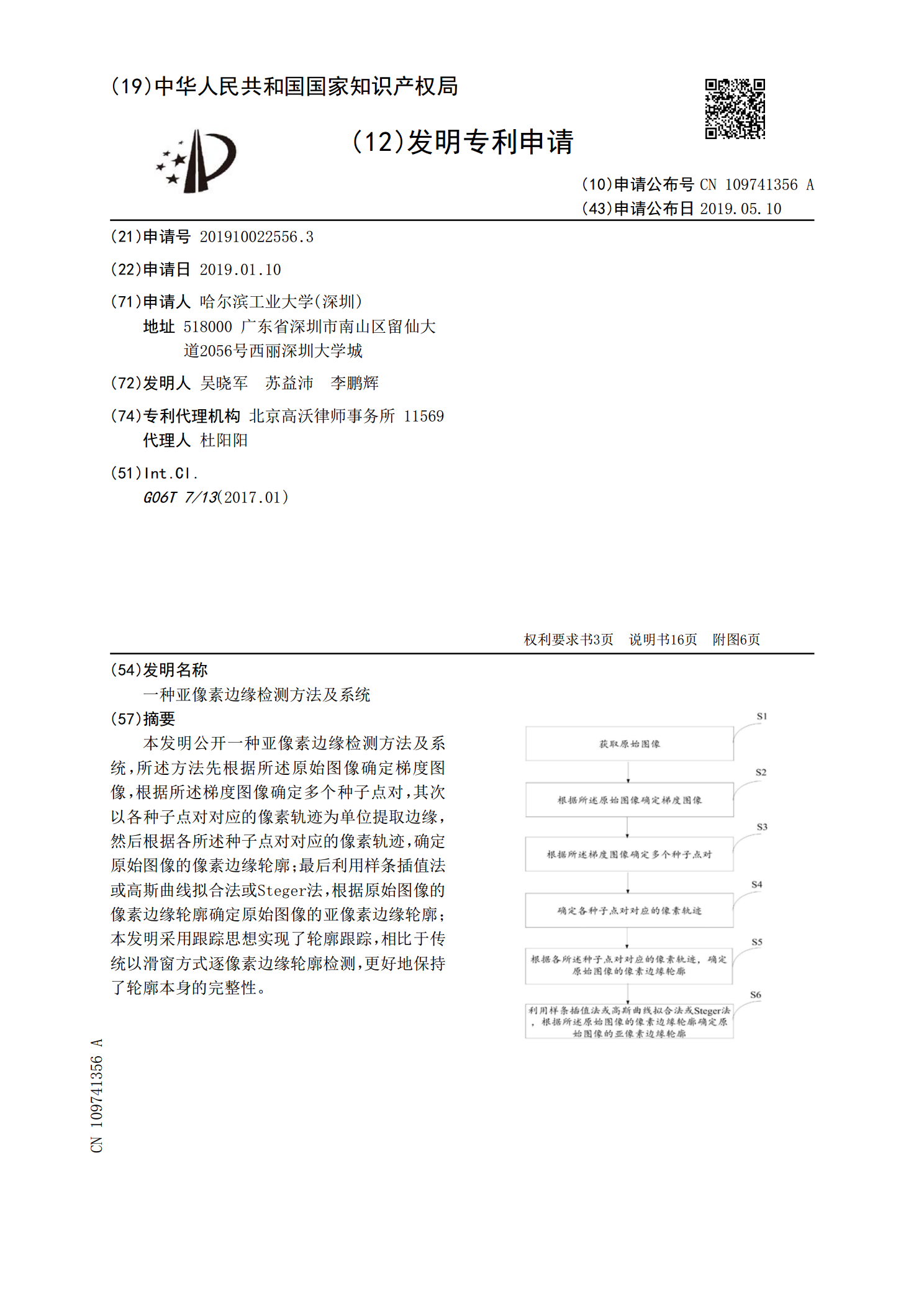
本发明公开一种亚像素边缘检测方法及系统,所述方法先根据所述原始图像确定梯度图像,根据所述梯度图像确定多个种子点对,其次以各种子点对对应的像素轨迹为单位提取边缘,然后根据各所述种子点对对应的像素轨迹,确定原始图像的像素边缘轮廓;最后利用样条插值法或高斯曲线拟合法或Steger法,根据原始图像的像素边缘轮廓确定原始图像的亚像素边缘轮廓;本发明采用跟踪思想实现了轮廓跟踪,相比于传统以滑窗方式逐像素边缘轮廓检测,更好地保持了轮廓本身的完整性。

一种改进的亚像素边缘检测方法.docx
一种改进的亚像素边缘检测方法摘要:亚像素边缘检测是计算机视觉领域中一个重要的问题。传统的边缘检测方法需要进一步进行亚像素精度的定位。本文提出了一种改进的亚像素边缘检测方法,该方法基于一种新的相位相关技术。通过对边缘图像进行滤波和相位相关处理,可以实现高精度的边缘检测。本文通过实验验证了该方法的有效性和优越性。该方法具有较高的实用价值和研究意义。关键词:亚像素边缘检测,相位相关技术,滤波处理,高精度一、简介随着计算机视觉技术的逐渐成熟,边缘检测技术已经被广泛应用于图像处理、医学影像、工业检测和安防监控等领域

医学影像亚像素边缘检测方法的改进.docx
医学影像亚像素边缘检测方法的改进标题:医学影像亚像素边缘检测方法的改进摘要:医学影像在临床诊断和治疗中扮演着重要的角色,而准确的边缘检测是医学影像分析的基础。然而,由于噪声、模糊和低分辨率等因素的存在,传统的像素级边缘检测方法通常不能满足医学影像中亚像素级别的边缘位置需求。因此,本论文针对医学影像亚像素级边缘检测问题,提出了一种改进的方法。该方法通过在图像域和频域进行多尺度分析和模糊处理,并引入亚像素级插值算法,有效提高了边缘检测的准确性和精度。1.引言医学影像是一种非常重要的辅助工具,在疾病诊断和治疗过

亚像素边缘检测及参数获取.docx
亚像素边缘检测及参数获取标题:亚像素边缘检测及参数获取摘要:亚像素边缘检测在计算机视觉和图像处理领域中具有重要的应用价值。本论文介绍了亚像素边缘检测的原理、常用方法和参数获取技术。首先,我们阐述了亚像素边缘检测的定义和重要性。接着,我们详细讨论了亚像素插值算法、梯度算子和非最大抑制等常用的亚像素边缘检测方法。此外,我们还探讨了参数获取的方法和技巧,包括使用Harris角点检测器进行自适应参数获取和使用基于机器学习的方法进行参数优化。最后,我们进行了实验验证和结果分析,证明了亚像素边缘检测及参数获取的有效性

一种基于改进形态学的亚像素边缘检测方法.pdf
本发明提供了基于改进形态学的亚像素边缘检测方法,包括:获取产品的数字化图像;运用形态学算子检测所述数字化图像的轮廓,获得像素轮廓粗提取区域;采用Canny算子从所述像素轮廓粗提取区域中检测出产品的整体像素级边缘;通过理想边缘点与扩散函数卷积得到的高斯型边缘函数,将所述整体像素级边缘拟合为产品的亚像素级边缘。本发明对形态学的边缘检测算子做了改进,能够平滑图像轮廓边缘,更好的保持边缘细节,提高抗噪性能,并保留图像边缘信息、保持边缘的光滑性和连续性,由此比较准确地检测出图像边缘,保证原图像的连通性,缩小了图像边