
一种轨道阀阀门阀位定位监测装置和监测方法.pdf

书生****aa

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轨道阀阀门阀位定位监测装置和监测方法.pdf
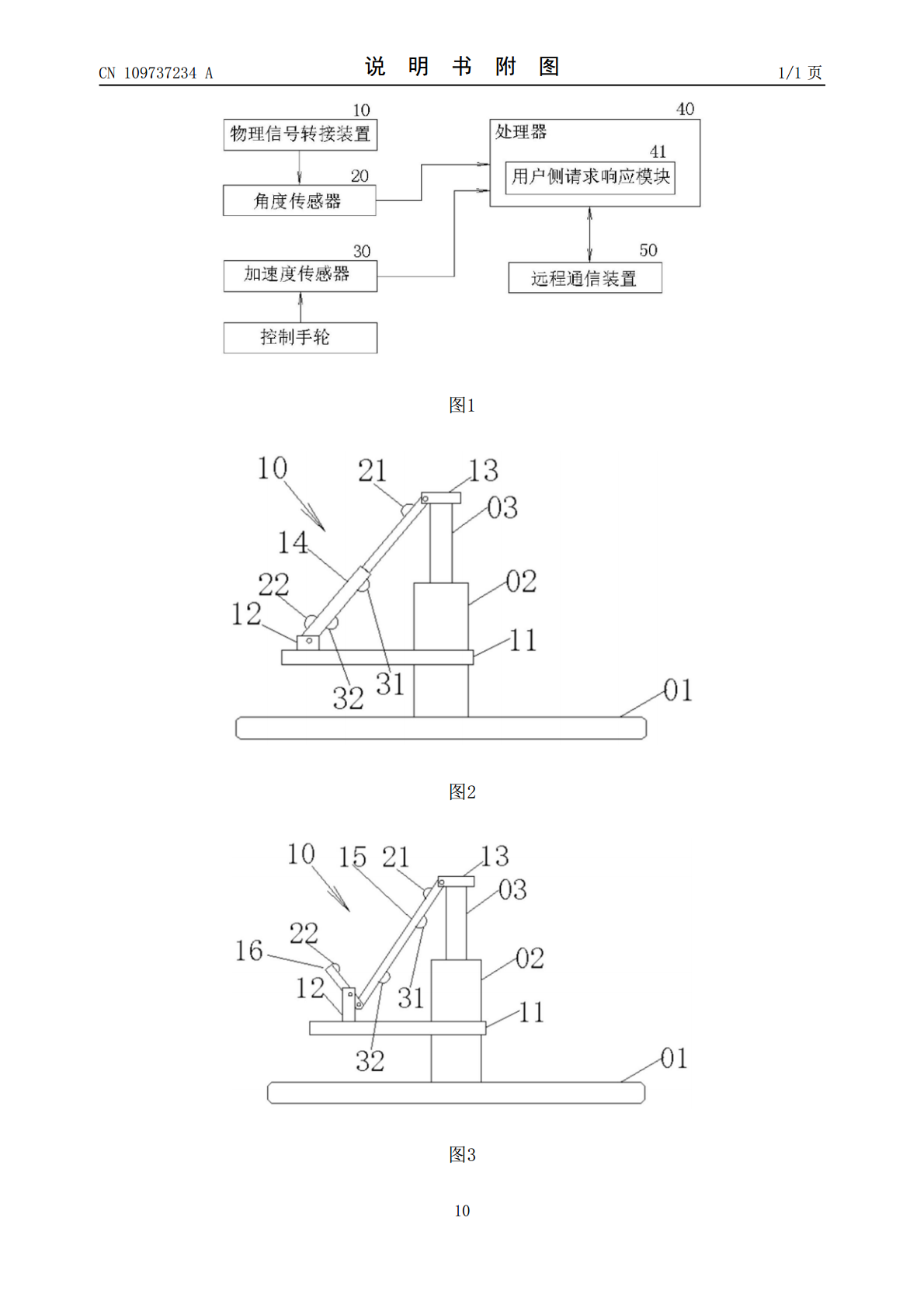
本发明提供了一种轨道阀阀门阀位定位监测装置和监测方法,解决现有阀门开度信息无法可靠远程反馈的技术问题。装置包括:物理信号转接装置,用于将与阀门开度正相关的位移变化信号转换为倾斜角度信号;角度传感器,用于受控采集所述物理信号转接装置的角度信号;加速度传感器,用于采集控制手轮运动平面内的加速度信号;处理器,用于根据所述加速度信号激活或休眠,激活后根据预置控制策略将所述角度信号形成阀门开度数据,并控制数据的发送和接收;远程通信装置,用于受控建立数据发送和接收的传输链路。将现有的阀门开度对应的有限长度量程以物理方
一种手动闸阀阀位监测识别装置.pdf
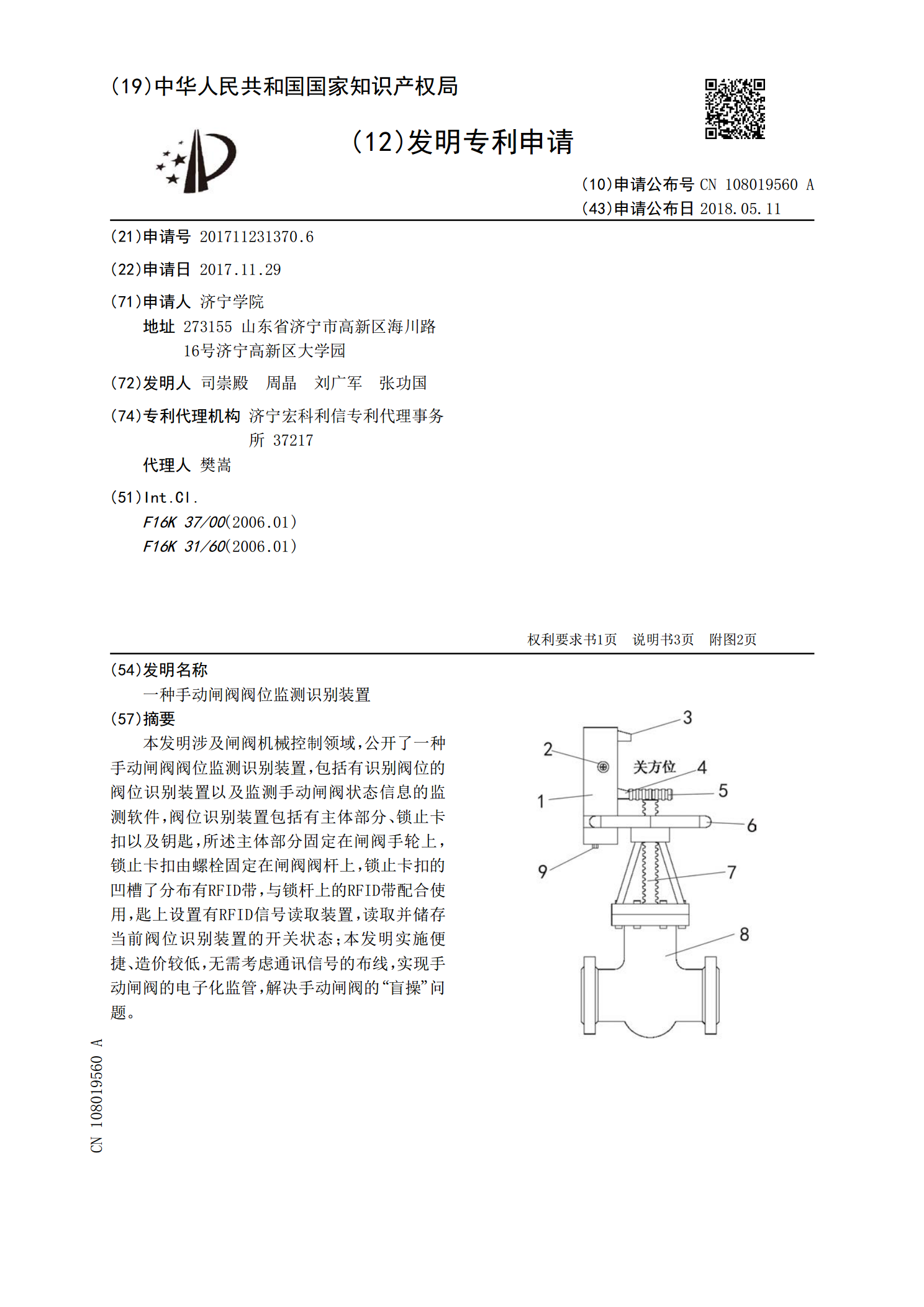
本发明涉及闸阀机械控制领域,公开了一种手动闸阀阀位监测识别装置,包括有识别阀位的阀位识别装置以及监测手动闸阀状态信息的监测软件,阀位识别装置包括有主体部分、锁止卡扣以及钥匙,所述主体部分固定在闸阀手轮上,锁止卡扣由螺栓固定在闸阀阀杆上,锁止卡扣的凹槽了分布有RFID带,与锁杆上的RFID带配合使用,匙上设置有RFID信号读取装置,读取并储存当前阀位识别装置的开关状态;本发明实施便捷、造价较低,无需考虑通讯信号的布线,实现手动闸阀的电子化监管,解决手动闸阀的“盲操”问题。
一种关阀杂质堵塞监测方法和关阀杂质堵塞监测系统.pdf
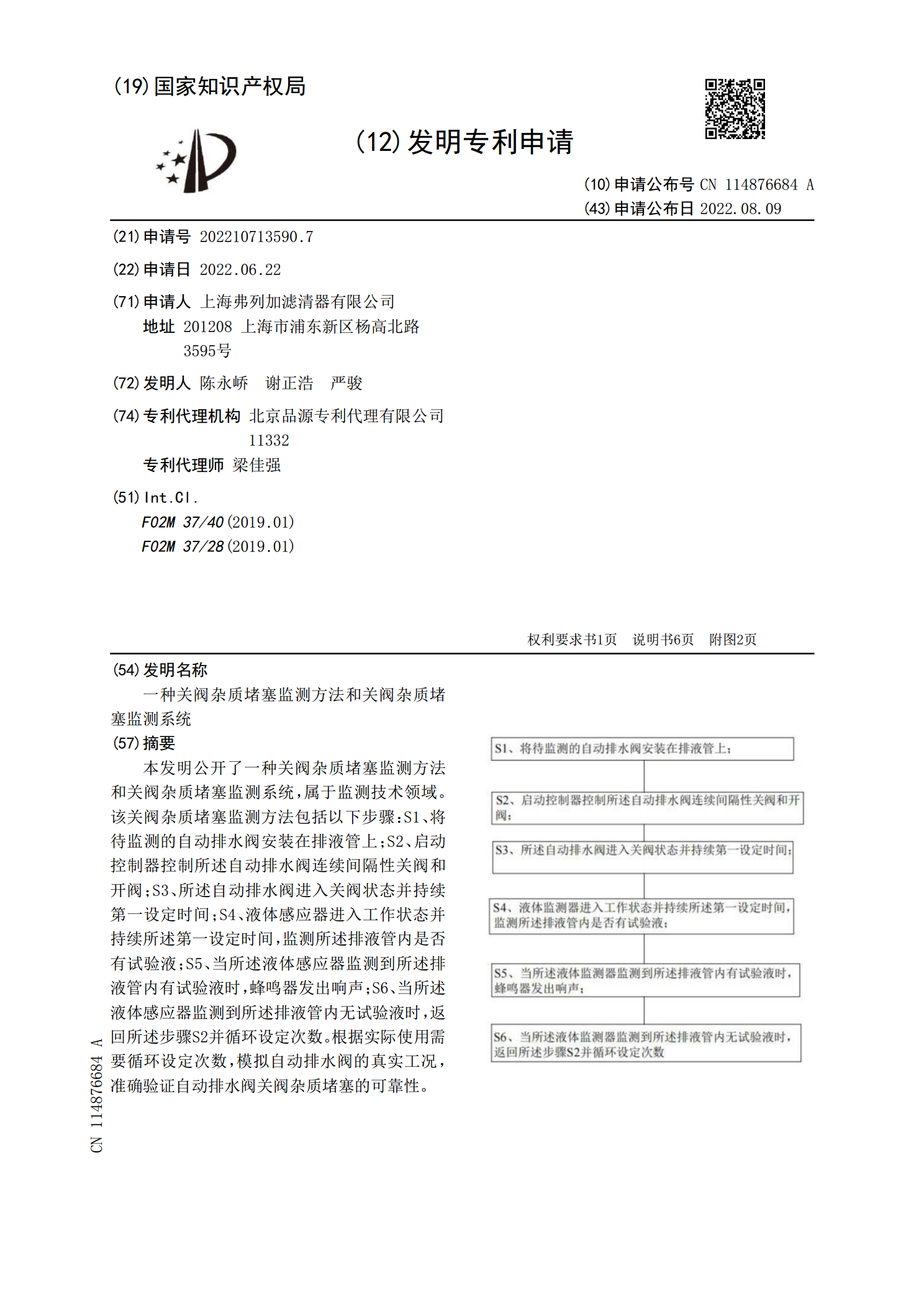
本发明公开了一种关阀杂质堵塞监测方法和关阀杂质堵塞监测系统,属于监测技术领域。该关阀杂质堵塞监测方法包括以下步骤:S1、将待监测的自动排水阀安装在排液管上;S2、启动控制器控制所述自动排水阀连续间隔性关阀和开阀;S3、所述自动排水阀进入关阀状态并持续第一设定时间;S4、液体感应器进入工作状态并持续所述第一设定时间,监测所述排液管内是否有试验液;S5、当所述液体感应器监测到所述排液管内有试验液时,蜂鸣器发出响声;S6、当所述液体感应器监测到所述排液管内无试验液时,返回所述步骤S2并循环设定次数。根据实际使用

一种换流阀声纹监测装置.pdf
本发明涉及一种换流阀声纹监测装置,包括管体、多个移动传感器机构;管体的横截面呈“C”型,管体的左侧内壁上固定有齿条,管体的上侧内壁上设置有第二凹槽,管体的下侧内壁上设置有第一凹槽,第一凹槽的槽底上固定有多条信号通讯条,第二凹槽的槽底上固定有两条供电条。移动传感器机构包括移动架,移动架的右侧安装有声波传感器,移动架的左侧安装有电机、齿轮,第二卡位块的顶部设置有信号传输触点模块,第一卡位块的底部设置有两个电极触点。移动架嵌入在管体的内部,齿轮与齿条啮合,两个电极触点分别与两根供电条接触,信号传输触点模块的上端
用于止逆阀阀瓣的保持装置和用于定位该装置的方法.pdf
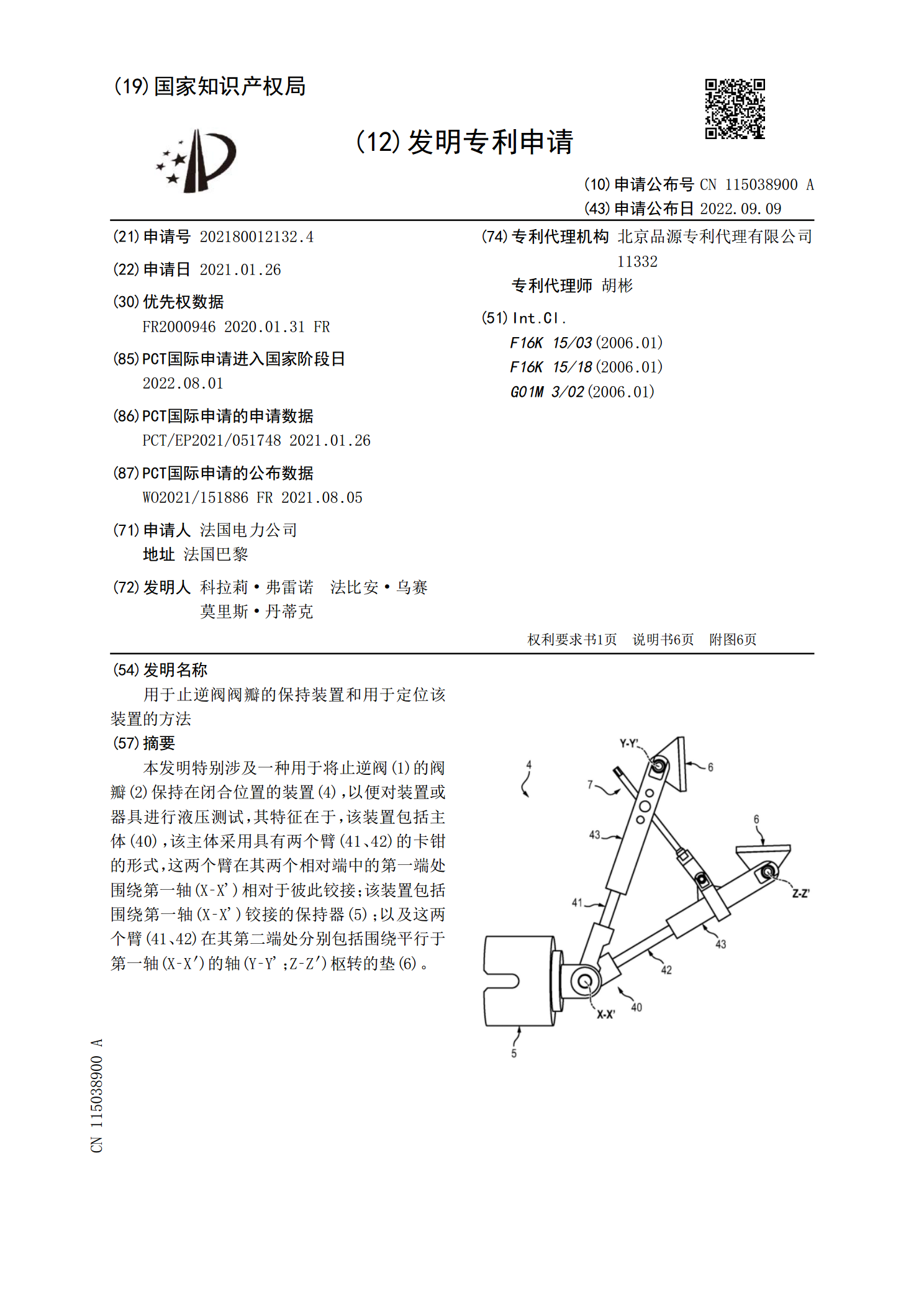
本发明特别涉及一种用于将止逆阀(1)的阀瓣(2)保持在闭合位置的装置(4),以便对装置或器具进行液压测试,其特征在于,该装置包括主体(40),该主体采用具有两个臂(41、42)的卡钳的形式,这两个臂在其两个相对端中的第一端处围绕第一轴(X?X’)相对于彼此铰接;该装置包括围绕第一轴(X?X’)铰接的保持器(5);以及这两个臂(41、42)在其第二端处分别包括围绕平行于第一轴(X?X′)的轴(Y?Y’;Z?Z′)枢转的垫(6)。