
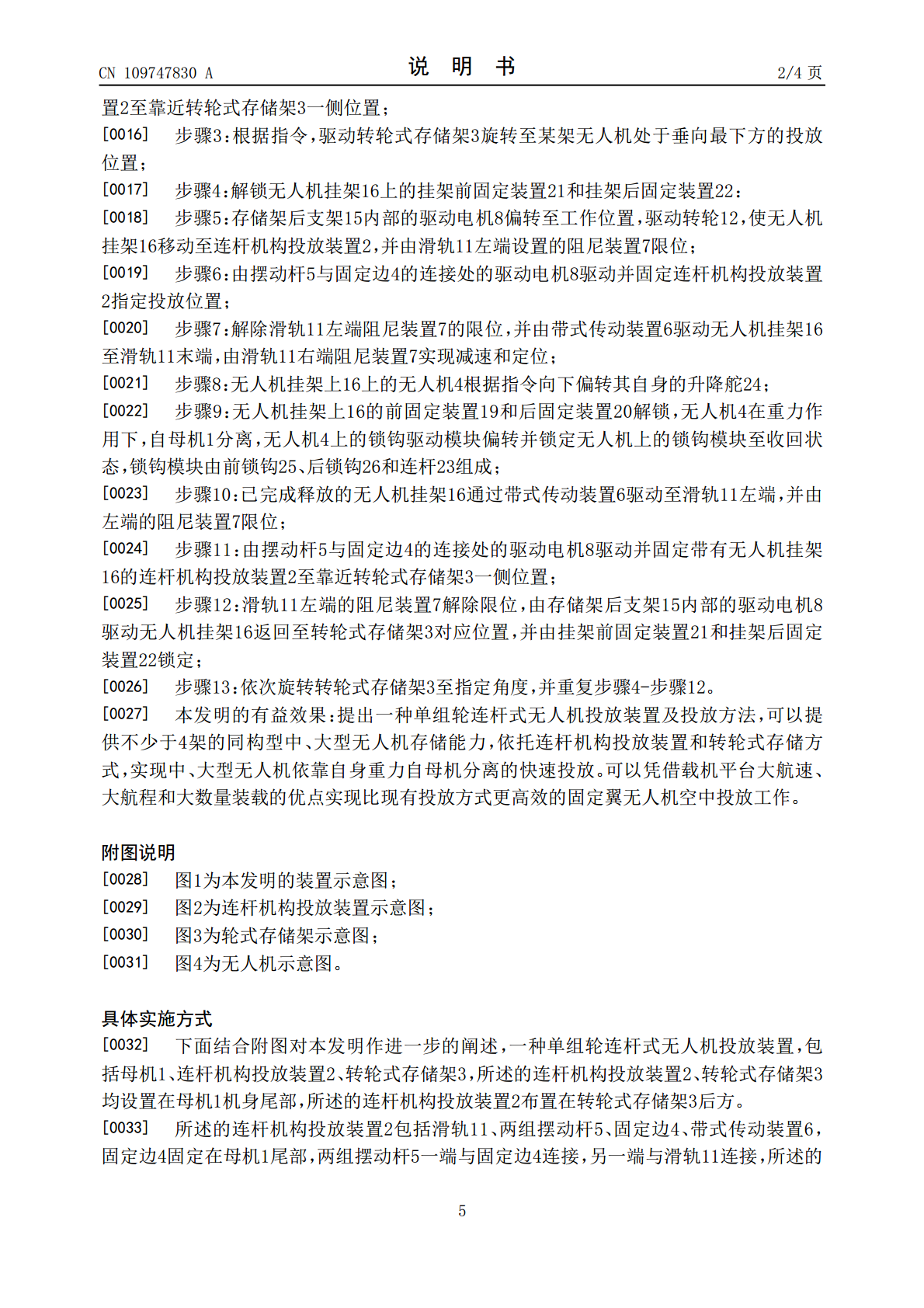
一种单组轮连杆式无人机投放装置及投放方法.pdf

茂学****23


1/9

2/9

3/9

4/9
5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种单组轮连杆式无人机投放装置及投放方法.pdf
本发明公开了一种单组轮连杆式无人机投放装置,包括母机、连杆机构投放装置、转轮式存储架,所述的连杆机构投放装置、转轮式存储架均设置在母机机身尾部,所述的连杆机构投放装置布置在转轮式存储架后方,本发明可以提供不少于4架的同构型中、大型无人机存储能力,依托连杆机构投放装置和转轮式存储方式,实现中、大型无人机依靠自身重力自母机分离的快速投放。可以凭借载机平台大航速、大航程和大数量装载的优点实现比现有投放方式更高效的固定翼无人机空中投放工作。

一种多组轮连杆式无人机投放装置及投放方法.pdf
本发明公开了一种多组轮连杆式无人机投放装置,包括母机、连杆机构投放装置、若干个转轮式存储架,所述的连杆机构投放装置设置在母机机身尾部,若干转轮式存储架依次排列设置在母机机身尾部,形成无人机投放通道,所述的连杆机构投放装置布置在无人机投放通道最末端的转轮式存储架后方,本发明提供不少于12架的同构型中、大型无人机存储能力,依托连杆机构投放装置和转轮式存储方式,实现中、大型无人机依靠自身重力自母机分离的快速投放。可以凭借载机平台大航速、大航程和大数量装载的优点实现比现有投放方式更高效的固定翼无人机空中投放工作。

一种单组轮滑轨式无人机投放装置及投放方法.pdf
本发明公开了一种单组轮滑轨式无人机投放装置,包括母机、滑轨投放装置、转轮式存储架,滑轨投放装置、转轮式存储架均设置在母机机身尾部,滑轨投放装置布置在转轮式存储架后方,转轮式存储架包括转轮、主转轴、存储架前支架、存储架后支架,转轮通过主转轴固定在存储架前支架、存储架后支架之间,转轮可绕主转轴旋转,转轮外圆周上均匀分布有若干无人机挂架本发明可以提供不少4架的同构型中、大型无人机存储能力,依托滑轨投放装置和转轮式存储方式,实现中、大型无人机依靠自身重力自母机分离的快速投放,可以凭借载机平台大航速、大航程和大数量
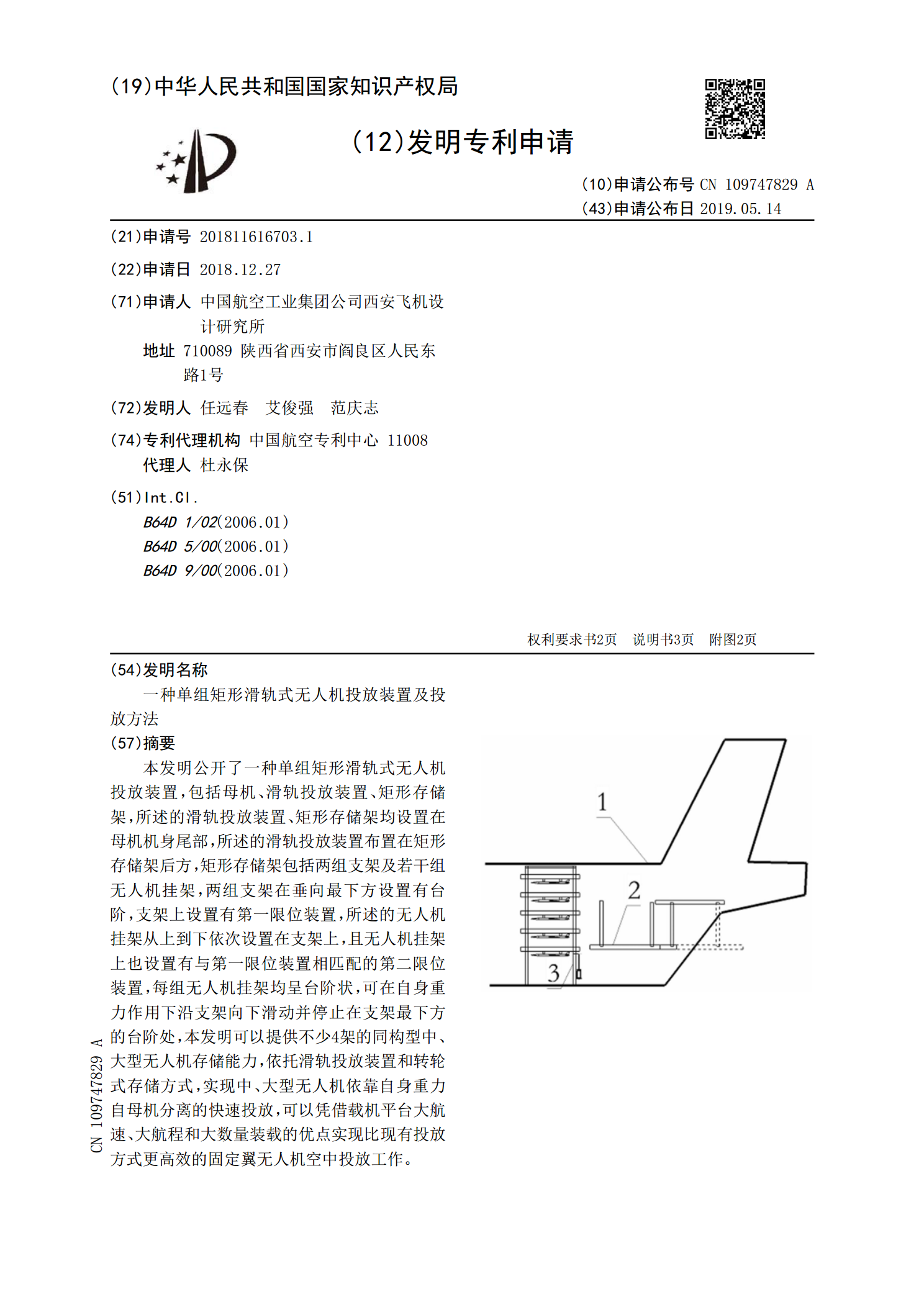
一种单组矩形滑轨式无人机投放装置及投放方法.pdf
本发明公开了一种单组矩形滑轨式无人机投放装置,包括母机、滑轨投放装置、矩形存储架,所述的滑轨投放装置、矩形存储架均设置在母机机身尾部,所述的滑轨投放装置布置在矩形存储架后方,矩形存储架包括两组支架及若干组无人机挂架,两组支架在垂向最下方设置有台阶,支架上设置有第一限位装置,所述的无人机挂架从上到下依次设置在支架上,且无人机挂架上也设置有与第一限位装置相匹配的第二限位装置,每组无人机挂架均呈台阶状,可在自身重力作用下沿支架向下滑动并停止在支架最下方的台阶处,本发明可以提供不少4架的同构型中、大型无人机存储能
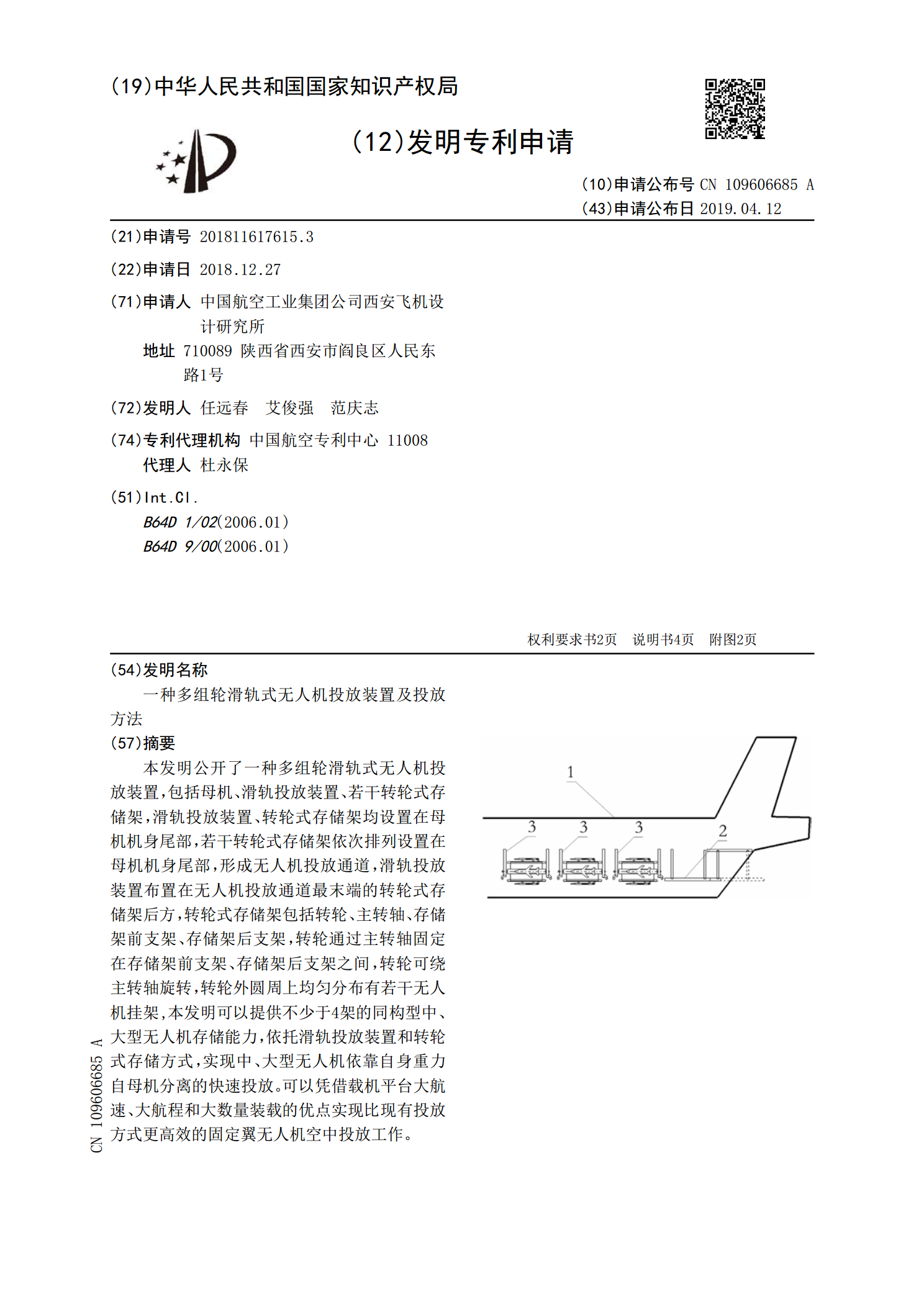
一种多组轮滑轨式无人机投放装置及投放方法.pdf
本发明公开了一种多组轮滑轨式无人机投放装置,包括母机、滑轨投放装置、若干转轮式存储架,滑轨投放装置、转轮式存储架均设置在母机机身尾部,若干转轮式存储架依次排列设置在母机机身尾部,形成无人机投放通道,滑轨投放装置布置在无人机投放通道最末端的转轮式存储架后方,转轮式存储架包括转轮、主转轴、存储架前支架、存储架后支架,转轮通过主转轴固定在存储架前支架、存储架后支架之间,转轮可绕主转轴旋转,转轮外圆周上均匀分布有若干无人机挂架,本发明可以提供不少于4架的同构型中、大型无人机存储能力,依托滑轨投放装置和转轮式存储方