
少齿差双锥齿差速减速机构.pdf

雨巷****彦峰

1/10
2/10
3/10
4/10
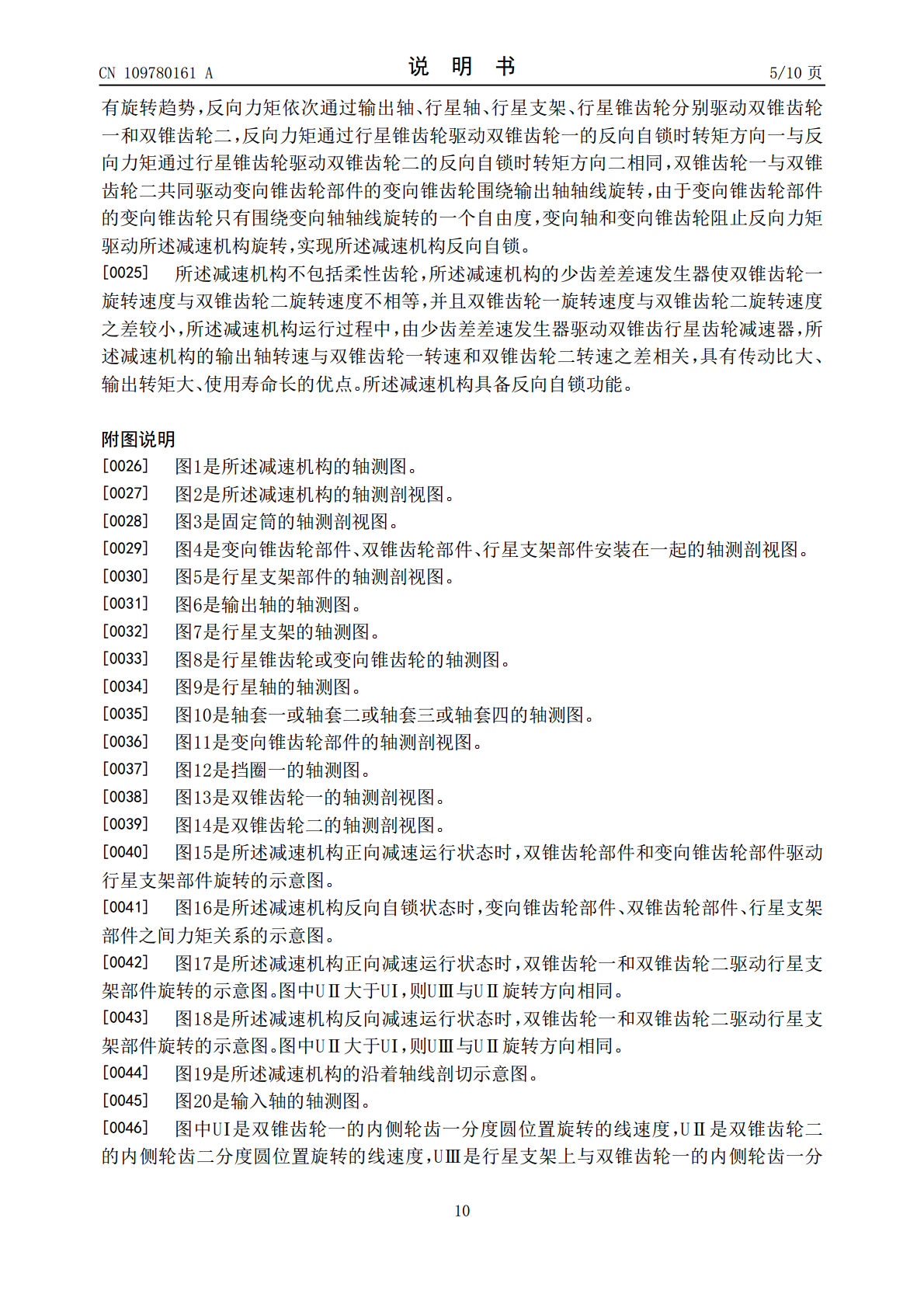
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
少齿差双锥齿差速减速机构.pdf
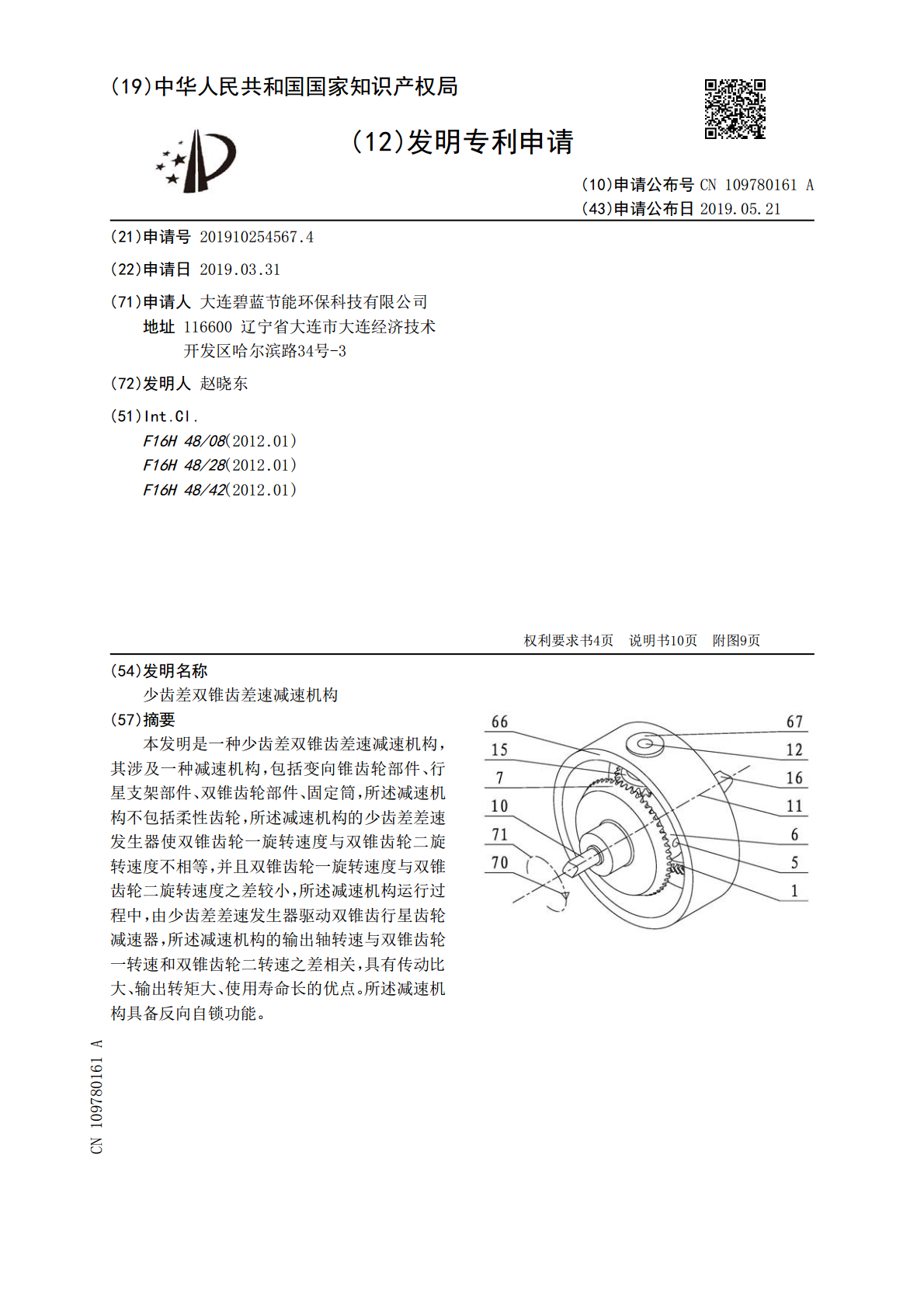
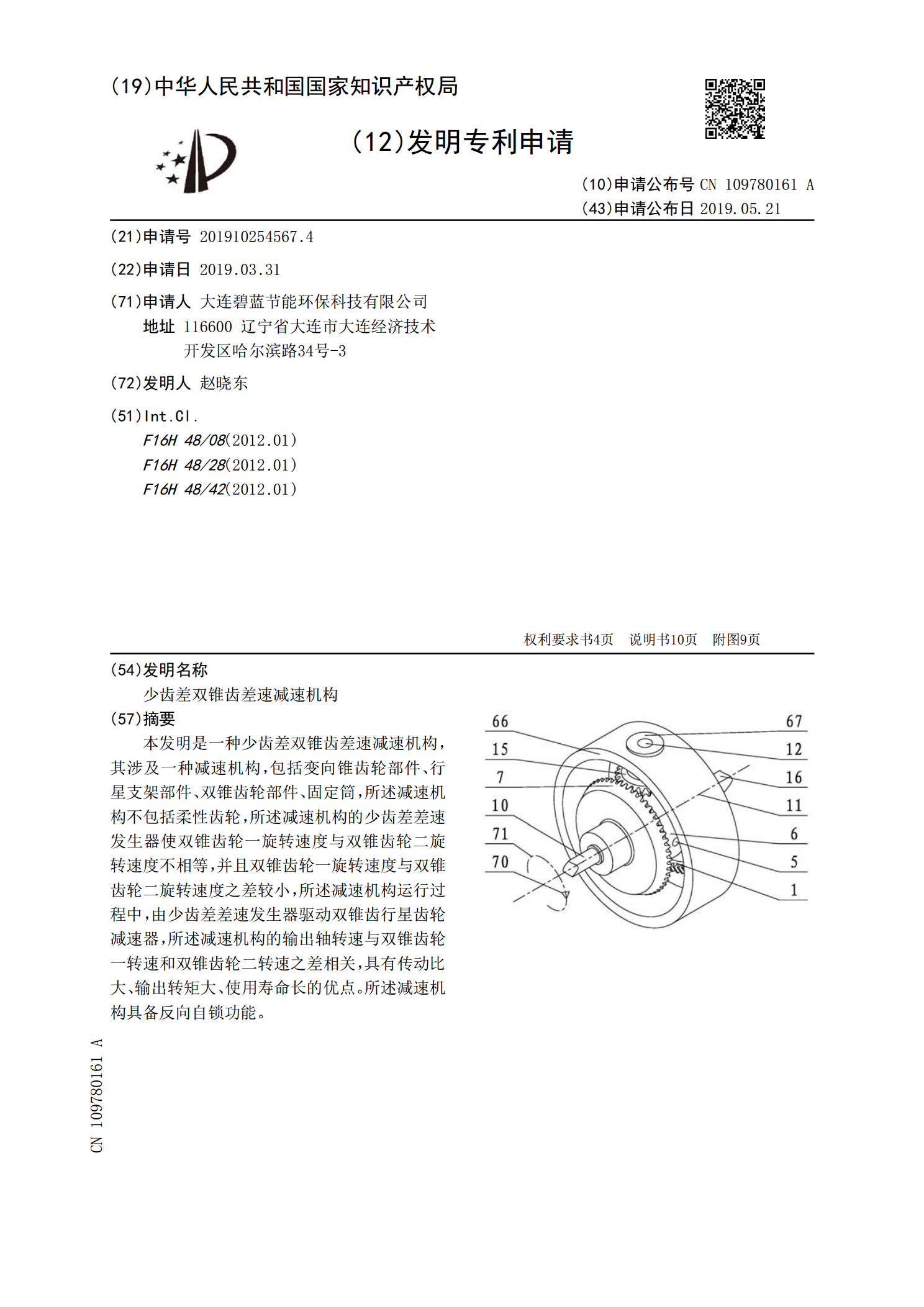
本发明是一种少齿差双锥齿差速减速机构,其涉及一种减速机构,包括变向锥齿轮部件、行星支架部件、双锥齿轮部件、固定筒,所述减速机构不包括柔性齿轮,所述减速机构的少齿差差速发生器使双锥齿轮一旋转速度与双锥齿轮二旋转速度不相等,并且双锥齿轮一旋转速度与双锥齿轮二旋转速度之差较小,所述减速机构运行过程中,由少齿差差速发生器驱动双锥齿行星齿轮减速器,所述减速机构的输出轴转速与双锥齿轮一转速和双锥齿轮二转速之差相关,具有传动比大、输出转矩大、使用寿命长的优点。所述减速机构具备反向自锁功能。
T形布置少齿差双锥齿差速减速机构.pdf
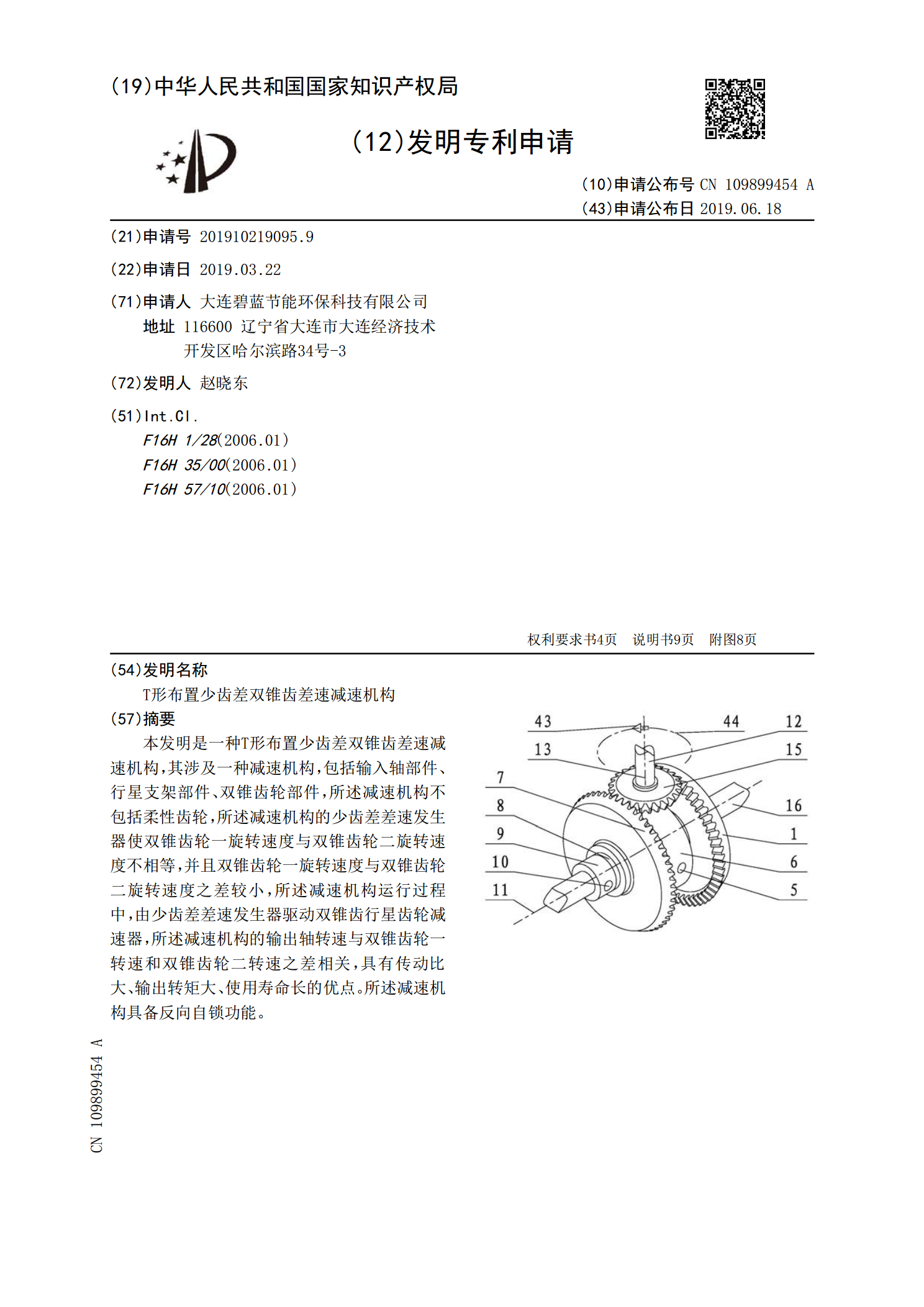
本发明是一种T形布置少齿差双锥齿差速减速机构,其涉及一种减速机构,包括输入轴部件、行星支架部件、双锥齿轮部件,所述减速机构不包括柔性齿轮,所述减速机构的少齿差差速发生器使双锥齿轮一旋转速度与双锥齿轮二旋转速度不相等,并且双锥齿轮一旋转速度与双锥齿轮二旋转速度之差较小,所述减速机构运行过程中,由少齿差差速发生器驱动双锥齿行星齿轮减速器,所述减速机构的输出轴转速与双锥齿轮一转速和双锥齿轮二转速之差相关,具有传动比大、输出转矩大、使用寿命长的优点。所述减速机构具备反向自锁功能。
T形布置双轴输出少齿差双锥齿差速减速机构.pdf
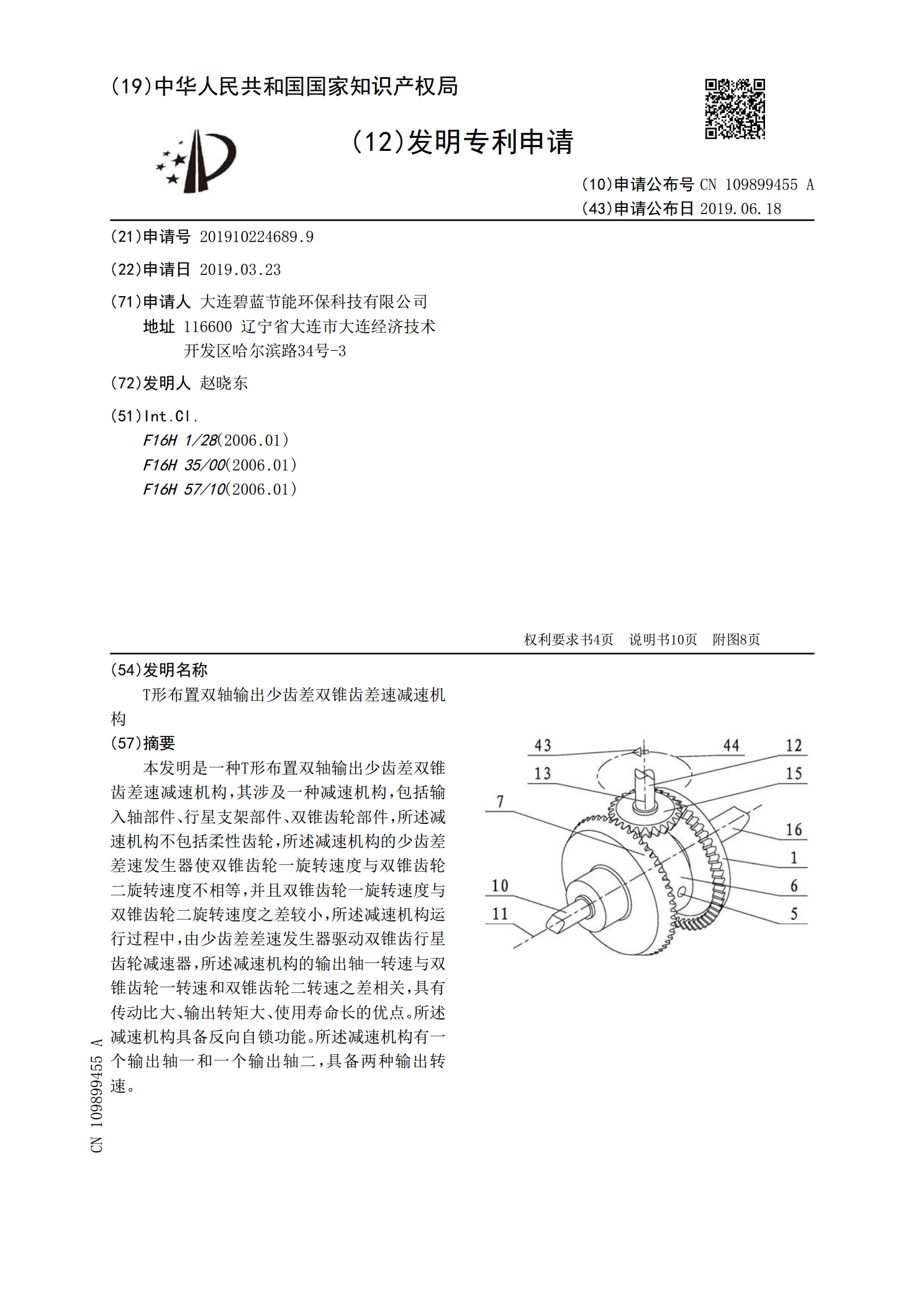
本发明是一种T形布置双轴输出少齿差双锥齿差速减速机构,其涉及一种减速机构,包括输入轴部件、行星支架部件、双锥齿轮部件,所述减速机构不包括柔性齿轮,所述减速机构的少齿差差速发生器使双锥齿轮一旋转速度与双锥齿轮二旋转速度不相等,并且双锥齿轮一旋转速度与双锥齿轮二旋转速度之差较小,所述减速机构运行过程中,由少齿差差速发生器驱动双锥齿行星齿轮减速器,所述减速机构的输出轴一转速与双锥齿轮一转速和双锥齿轮二转速之差相关,具有传动比大、输出转矩大、使用寿命长的优点。所述减速机构具备反向自锁功能。所述减速机构有一个输出轴
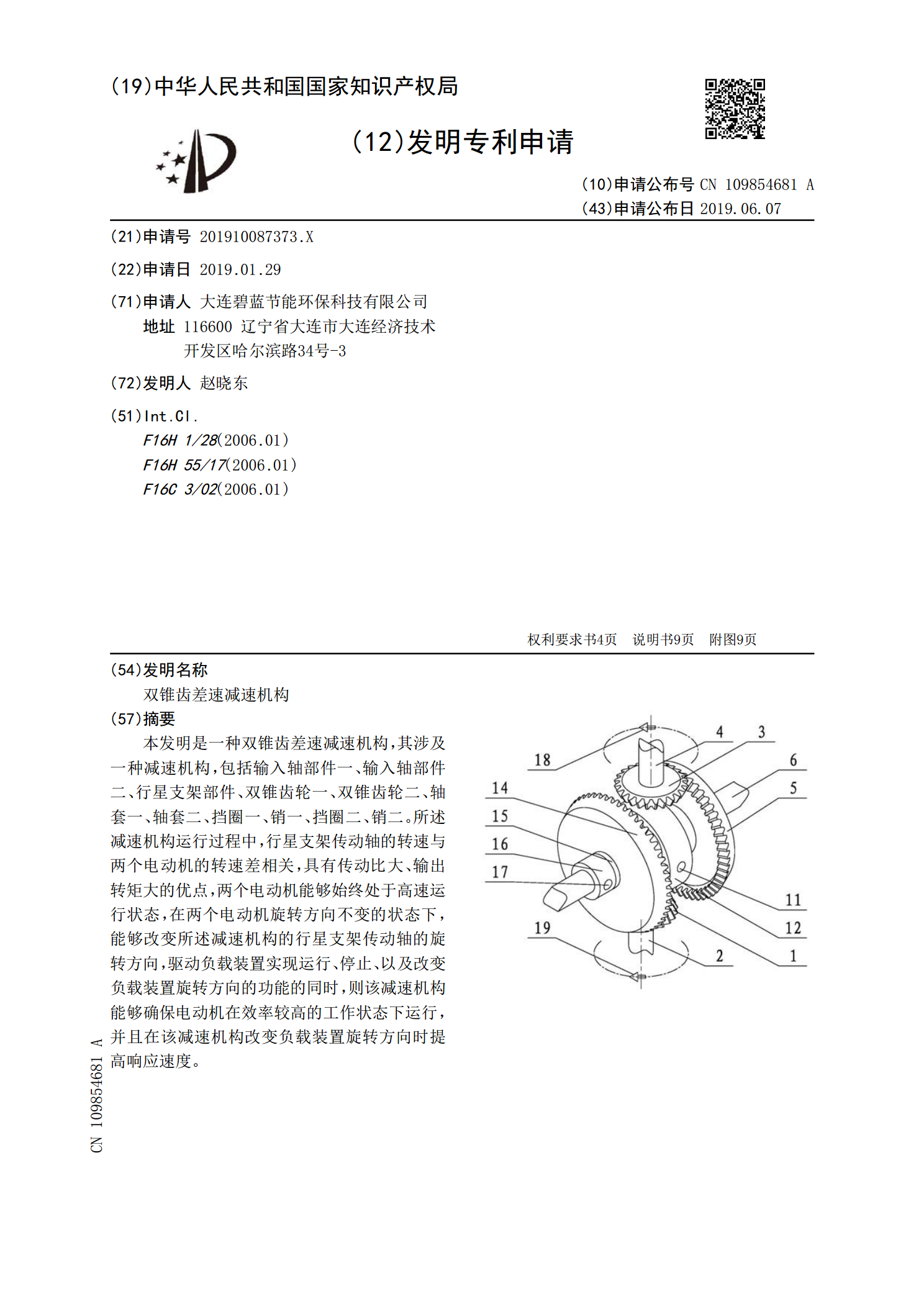
双锥齿差速减速机构.pdf
本发明是一种双锥齿差速减速机构,其涉及一种减速机构,包括输入轴部件一、输入轴部件二、行星支架部件、双锥齿轮一、双锥齿轮二、轴套一、轴套二、挡圈一、销一、挡圈二、销二。所述减速机构运行过程中,行星支架传动轴的转速与两个电动机的转速差相关,具有传动比大、输出转矩大的优点,两个电动机能够始终处于高速运行状态,在两个电动机旋转方向不变的状态下,能够改变所述减速机构的行星支架传动轴的旋转方向,驱动负载装置实现运行、停止、以及改变负载装置旋转方向的功能的同时,则该减速机构能够确保电动机在效率较高的工作状态下运行,并且
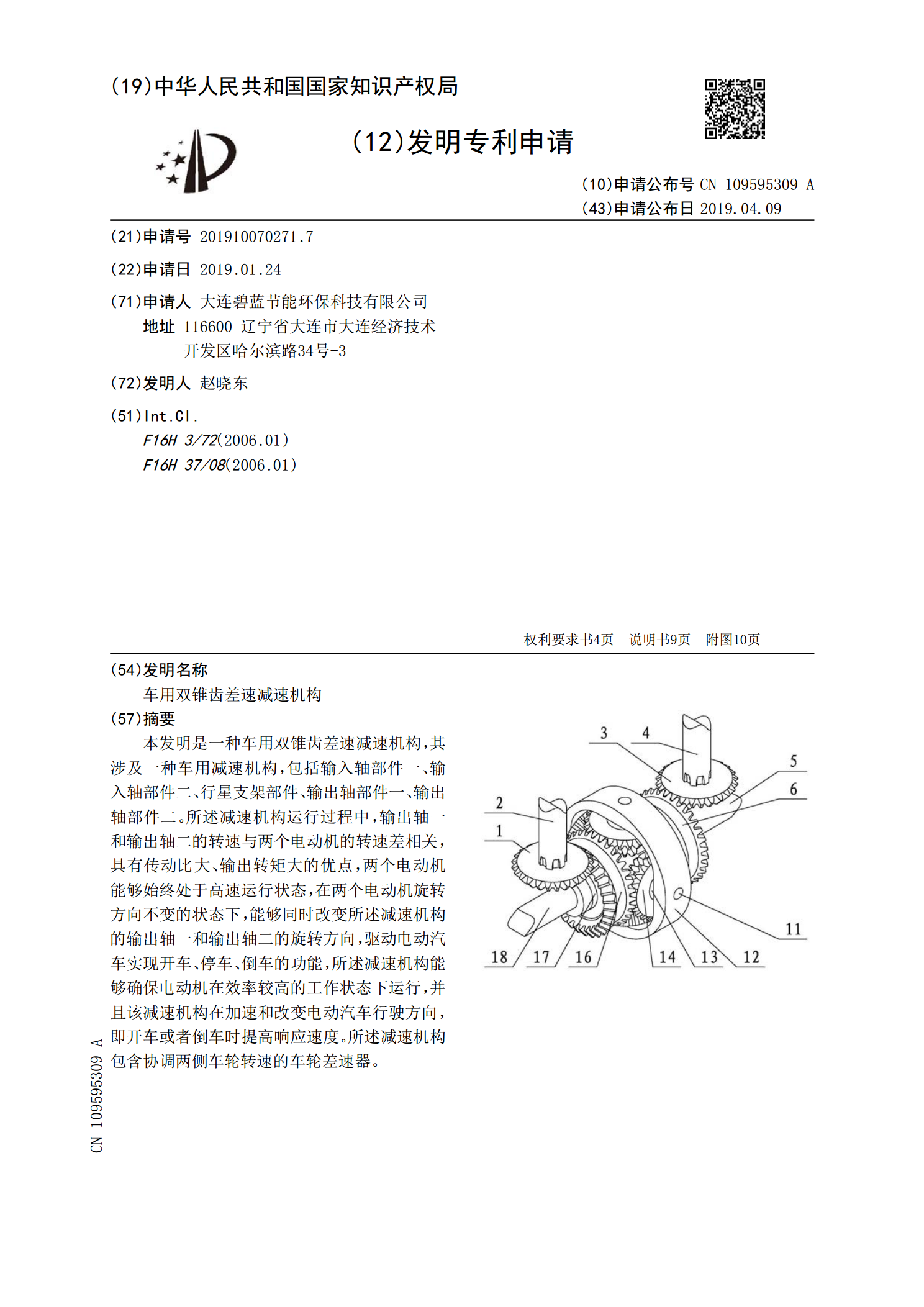
车用双锥齿差速减速机构.pdf
本发明是一种车用双锥齿差速减速机构,其涉及一种车用减速机构,包括输入轴部件一、输入轴部件二、行星支架部件、输出轴部件一、输出轴部件二。所述减速机构运行过程中,输出轴一和输出轴二的转速与两个电动机的转速差相关,具有传动比大、输出转矩大的优点,两个电动机能够始终处于高速运行状态,在两个电动机旋转方向不变的状态下,能够同时改变所述减速机构的输出轴一和输出轴二的旋转方向,驱动电动汽车实现开车、停车、倒车的功能,所述减速机构能够确保电动机在效率较高的工作状态下运行,并且该减速机构在加速和改变电动汽车行驶方向,即开车