
基于特定特征识别的运动视觉跟踪系统.pdf

论文****酱吖

1/6

2/6

3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于特定特征识别的运动视觉跟踪系统.pdf
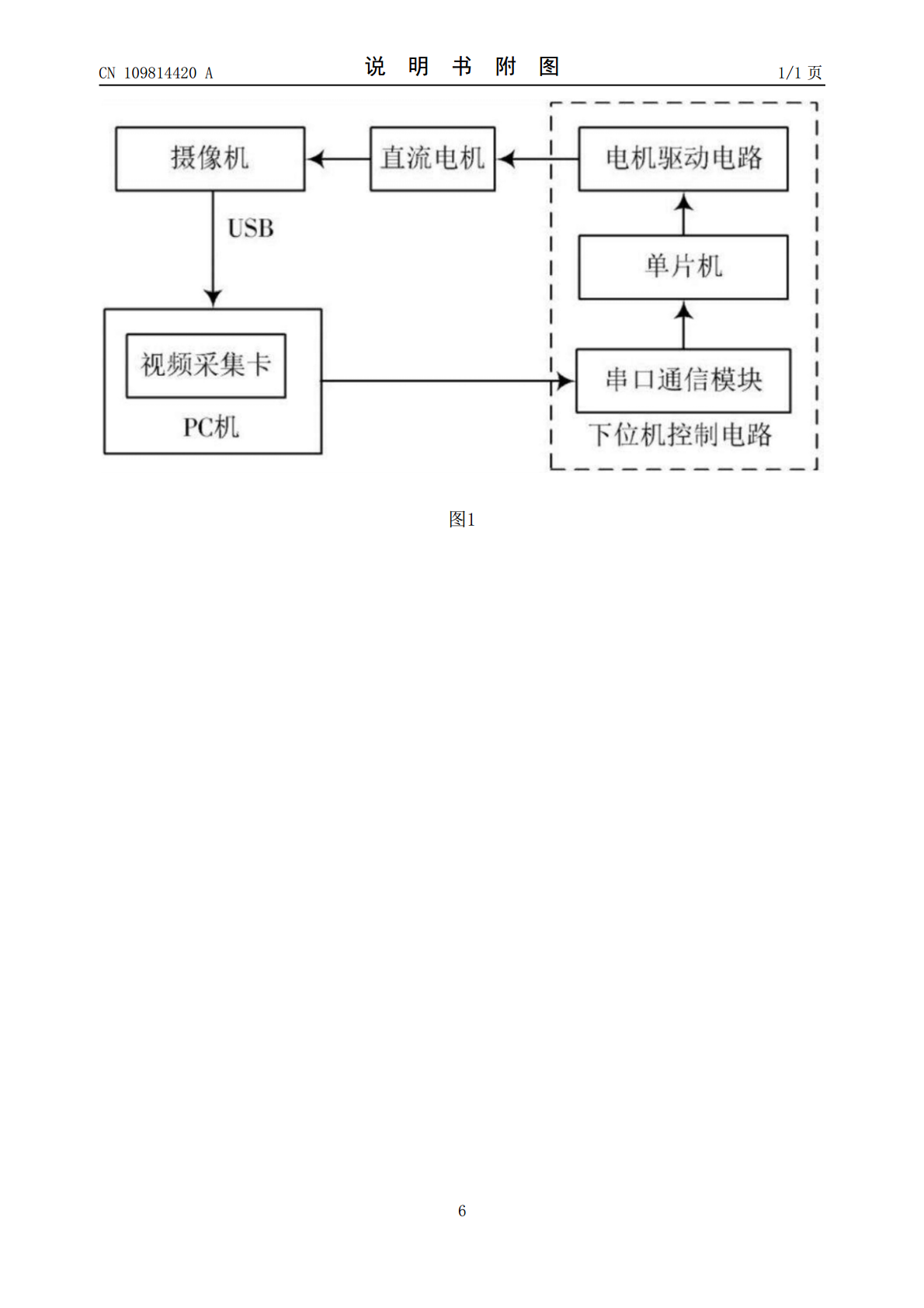
本发明涉及一种视觉跟踪系统,具体涉及一种基于特定特征识别的运动视觉跟踪系统;包括控制模块、执行模块和检测模块,执行模块包括两个直流电机、齿轮传动模块和云台,检测模块包括摄像机和PC机,控制模块包括PC机中的基于特定特征识别的控制算法和下位机控制电路,摄像机与PC机连接,PC机与下位机控制电路连接,下位机控制电路包括串口通信模块、单片机和电机驱动电路,单片机通过串口通信模块接受上位机的控制信息,并通过电机驱动电路实现对直流电机的控制,直流电机控制摄像机;采用本发明技术方案的基于特定特征识别的运动视觉跟踪系统

基于形状识别的视觉跟踪系统.docx
基于形状识别的视觉跟踪系统摘要本文介绍了一种基于形状识别的视觉跟踪系统。该系统利用计算机视觉技术,通过对目标形状进行识别和跟踪,实现了对目标物体的追踪。该系统具备较高的准确性和鲁棒性,并能够优化跟踪结果。文章分别从背景建模、形状识别以及跟踪三个方面详细地介绍了该系统的实现方法和流程。实验结果表明,该系统在各种复杂场景下均能取得良好的跟踪效果。关键词:形状识别;视觉跟踪;计算机视觉;背景建模;目标跟踪引言视觉跟踪是计算机视觉领域中的一项重要研究内容,涉及到物体识别、运动分析、动态识别和目标跟踪等多个方面。目

基于形状识别的视觉跟踪系统的任务书.docx
基于形状识别的视觉跟踪系统的任务书任务书一、背景视觉跟踪技术基于计算机视觉和机器学习等领域,可实现对视频序列中特定对象的自动追踪,被广泛应用于安防监控、自动驾驶、虚拟现实等领域。当前,形状识别技术在视觉跟踪中的应用越来越受到关注,通过对目标轮廓的形状建模和匹配,能够更加准确地跟踪运动目标。二、任务描述本次任务旨在设计和实现一个基于形状识别的视觉跟踪系统,具体任务描述如下:1.数据采集:根据实际应用需求,采集足够多的视频序列作为数据集,数据集需包含运动目标的多个姿态和各种复杂背景。2.形状建模:对采集到的数

基于视觉的运动目标跟踪系统研究.docx
基于视觉的运动目标跟踪系统研究摘要视觉目标跟踪是计算机视觉领域的一个挑战性问题。本文介绍了基于视觉的运动目标跟踪系统的研究。首先,介绍了基于视觉的目标跟踪的发展历程和现状,然后分析了视觉目标跟踪的技术难点。接着,介绍了常见的视觉目标跟踪方法和性能评价指标,最后介绍了未来研究的方向。关键词:视觉目标跟踪;技术难点;跟踪方法;性能评价指标。1.前言目标跟踪是计算机视觉领域的一个热门研究方向之一。其目的是在动态场景中跟踪特定的运动目标,并对目标进行实时和稳健的定位。基于视觉的目标跟踪是其中一个研究方向。与传统的

基于FPGA与机器视觉的运动跟踪系统设计.docx
基于FPGA与机器视觉的运动跟踪系统设计基于FPGA与机器视觉的运动跟踪系统设计摘要:随着科技的发展,机器视觉技术的广泛应用,使得运动跟踪系统越来越受关注。本论文基于FPGA与机器视觉,设计了一种高效、精确的运动跟踪系统。通过利用FPGA硬件的并行计算能力和机器视觉算法的优势,实现了实时跟踪目标的功能。本系统在跟踪效果和运算速度上均取得了较好的结果,具有较高的实用性和应用前景。一、引言随着计算机技术和图像处理技术的快速发展,机器视觉应用的范围越来越广泛。其中,运动跟踪技术在视频监控、智能交通系统、虚拟现实